
一种轨迹跟踪控制方法、装置、设备和存储介质.pdf

a是****澜吖

1/10
2/10
3/10
4/10
5/10
6/10
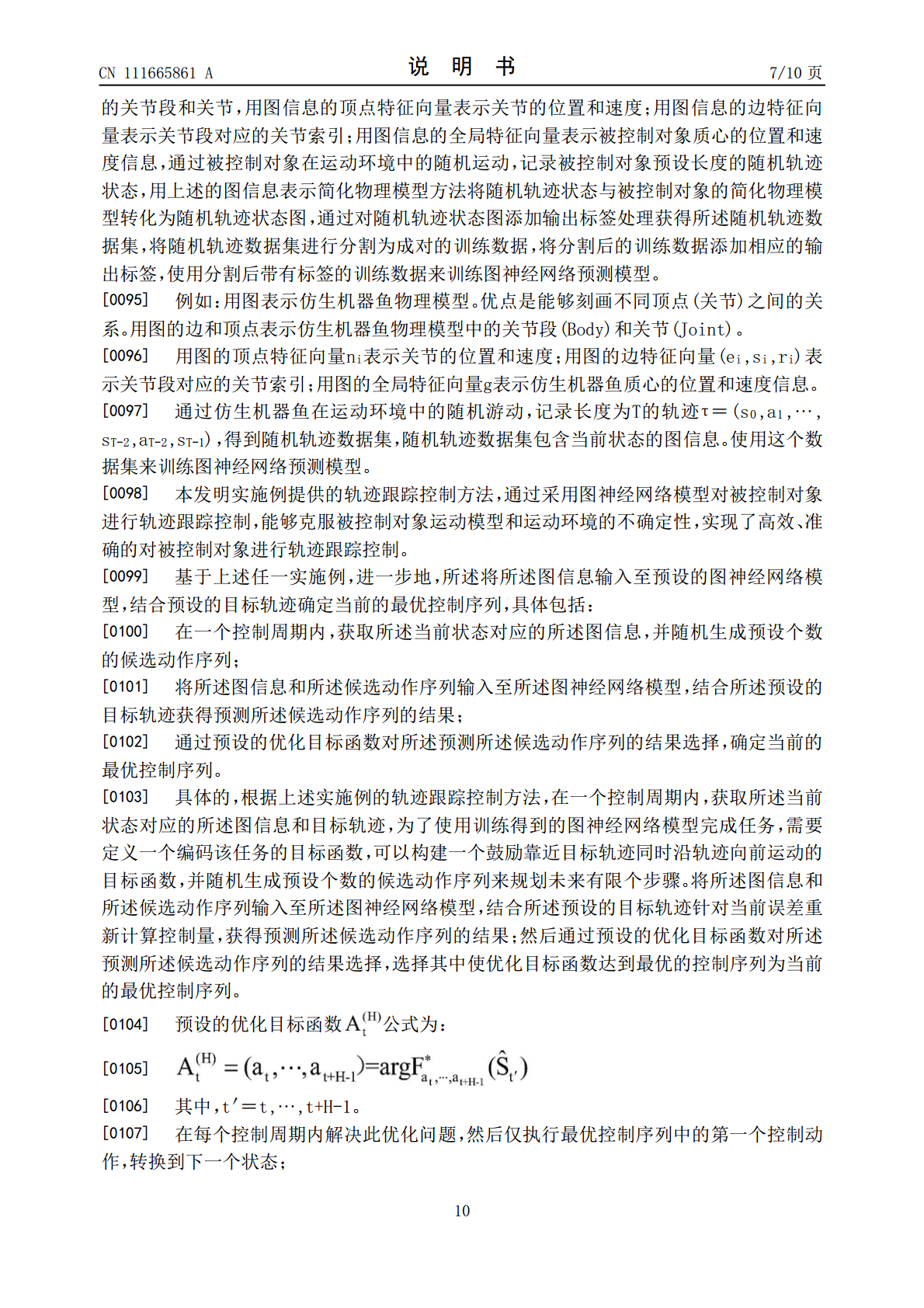
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轨迹跟踪控制方法、装置、设备和存储介质.pdf
本发明实施例提供一种轨迹跟踪控制方法、装置、设备和存储介质。该方法包括:获得被控制对象的当前状态,将所述当前状态由图信息表示;将所述图信息输入至预设的图神经网络模型,结合预设的目标轨迹确定当前的最优控制序列;其中,所述预设的图神经网络模型是基于随机轨迹数据集进行训练后得到,所述随机轨迹数据集包括随机轨迹状态图和输出标签。本发明实施例通过采用图神经网络模型对被控制对象进行轨迹跟踪控制,能够克服水下被控制对象运动模型和运动环境的不确定性,实现了高效、准确的对被控制对象进行轨迹跟踪控制。
无人矿车的轨迹跟踪控制方法、装置、设备及存储介质.pdf
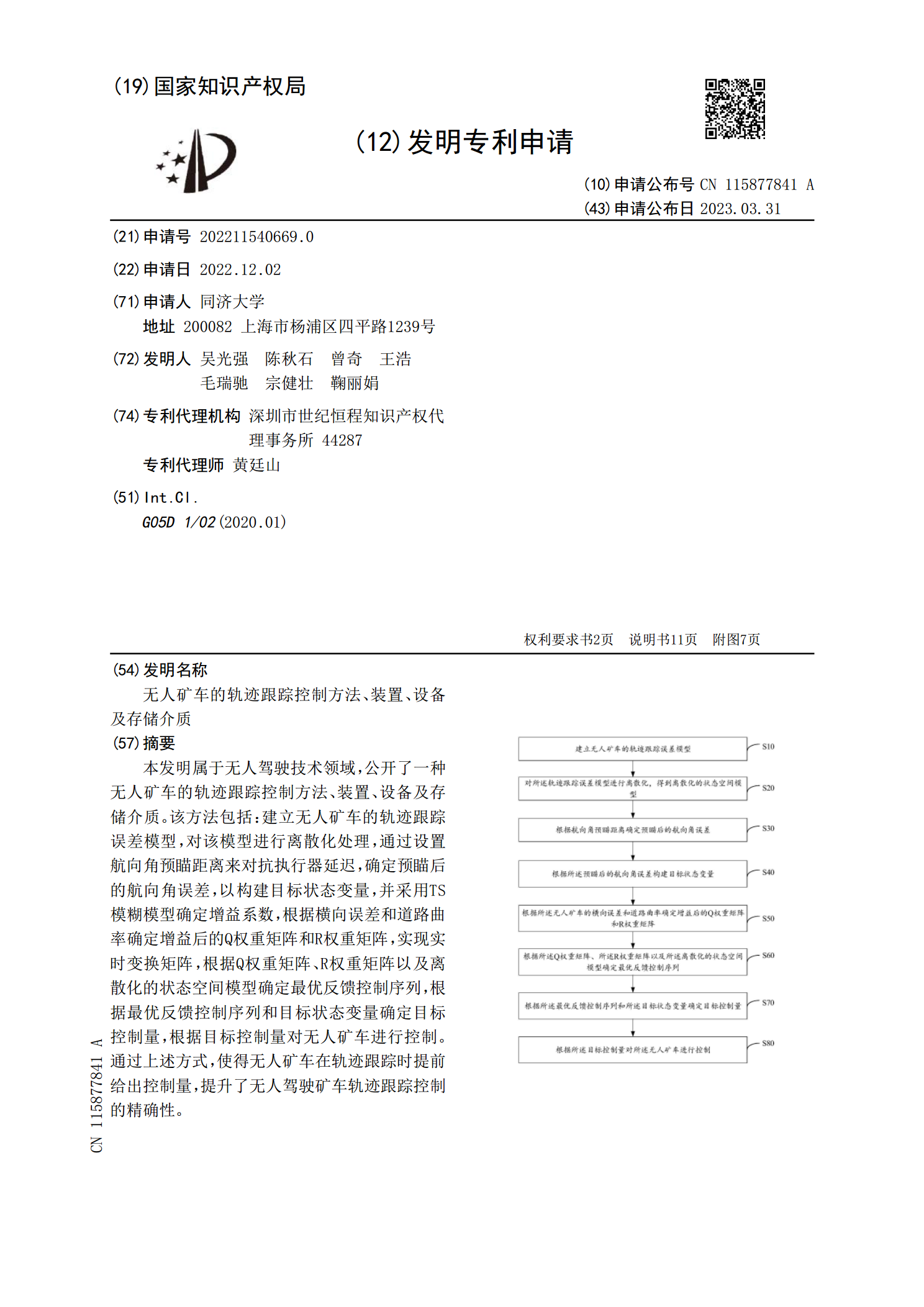
本发明属于无人驾驶技术领域,公开了一种无人矿车的轨迹跟踪控制方法、装置、设备及存储介质。该方法包括:建立无人矿车的轨迹跟踪误差模型,对该模型进行离散化处理,通过设置航向角预瞄距离来对抗执行器延迟,确定预瞄后的航向角误差,以构建目标状态变量,并采用TS模糊模型确定增益系数,根据横向误差和道路曲率确定增益后的Q权重矩阵和R权重矩阵,实现实时变换矩阵,根据Q权重矩阵、R权重矩阵以及离散化的状态空间模型确定最优反馈控制序列,根据最优反馈控制序列和目标状态变量确定目标控制量,根据目标控制量对无人矿车进行控制。通过上
轨迹跟踪方法、装置、存储介质及电子设备.pdf
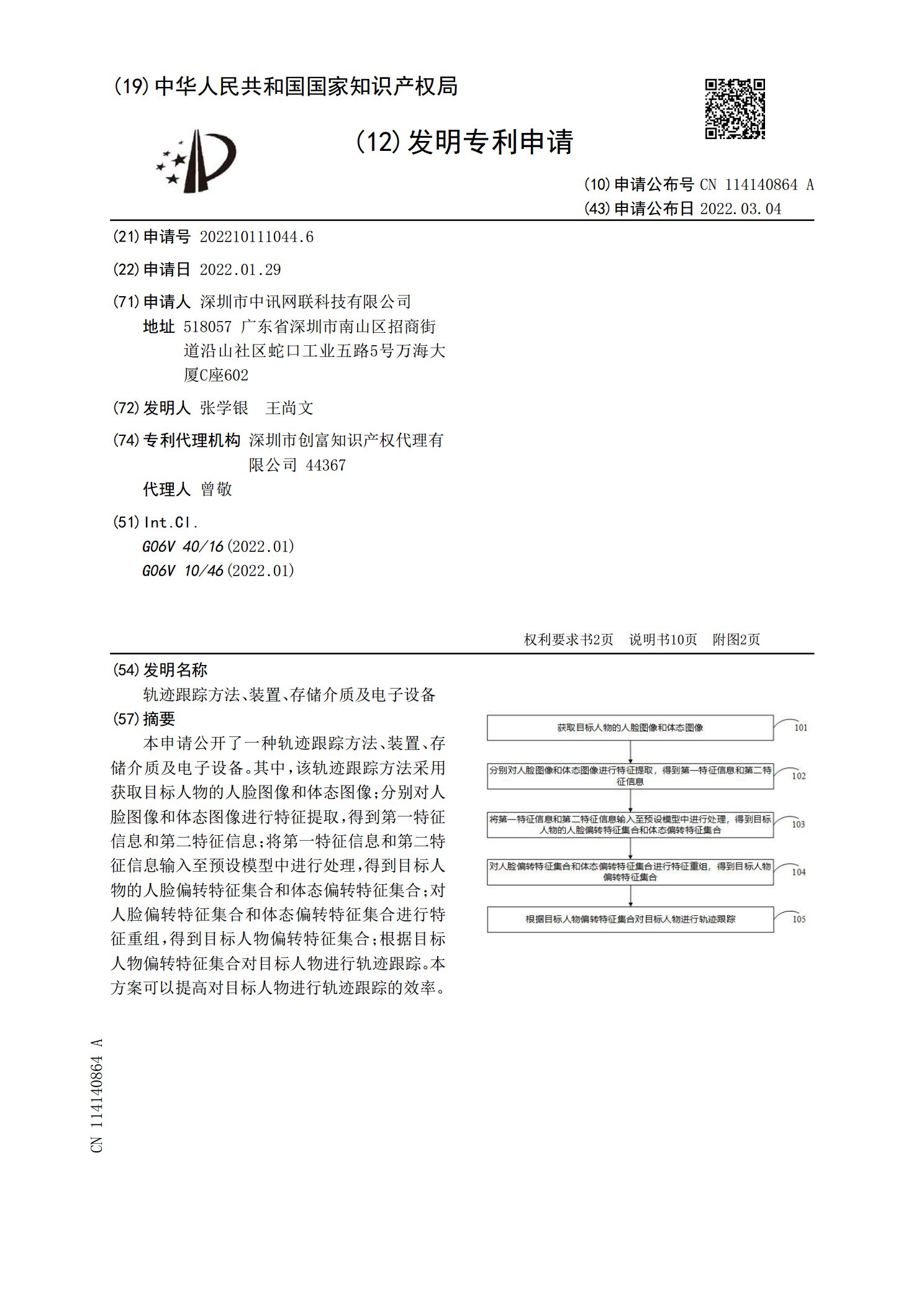
本申请公开了一种轨迹跟踪方法、装置、存储介质及电子设备。其中,该轨迹跟踪方法采用获取目标人物的人脸图像和体态图像;分别对人脸图像和体态图像进行特征提取,得到第一特征信息和第二特征信息;将第一特征信息和第二特征信息输入至预设模型中进行处理,得到目标人物的人脸偏转特征集合和体态偏转特征集合;对人脸偏转特征集合和体态偏转特征集合进行特征重组,得到目标人物偏转特征集合;根据目标人物偏转特征集合对目标人物进行轨迹跟踪。本方案可以提高对目标人物进行轨迹跟踪的效率。
一种轨迹规划方法、装置、设备和存储介质.pdf
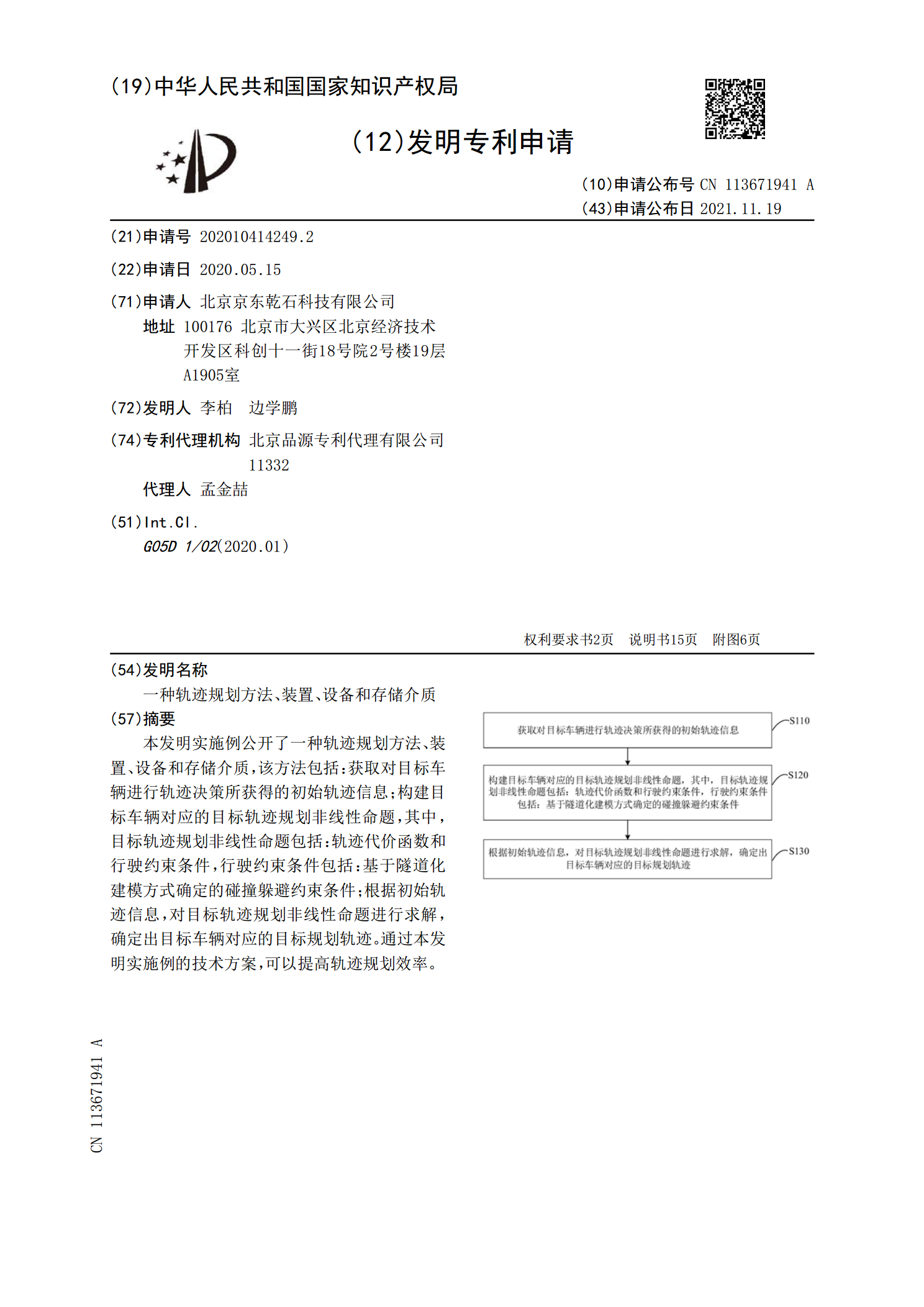
本发明实施例公开了一种轨迹规划方法、装置、设备和存储介质,该方法包括:获取对目标车辆进行轨迹决策所获得的初始轨迹信息;构建目标车辆对应的目标轨迹规划非线性命题,其中,目标轨迹规划非线性命题包括:轨迹代价函数和行驶约束条件,行驶约束条件包括:基于隧道化建模方式确定的碰撞躲避约束条件;根据初始轨迹信息,对目标轨迹规划非线性命题进行求解,确定出目标车辆对应的目标规划轨迹。通过本发明实施例的技术方案,可以提高轨迹规划效率。
运动轨迹规划方法、装置、设备和存储介质.pdf
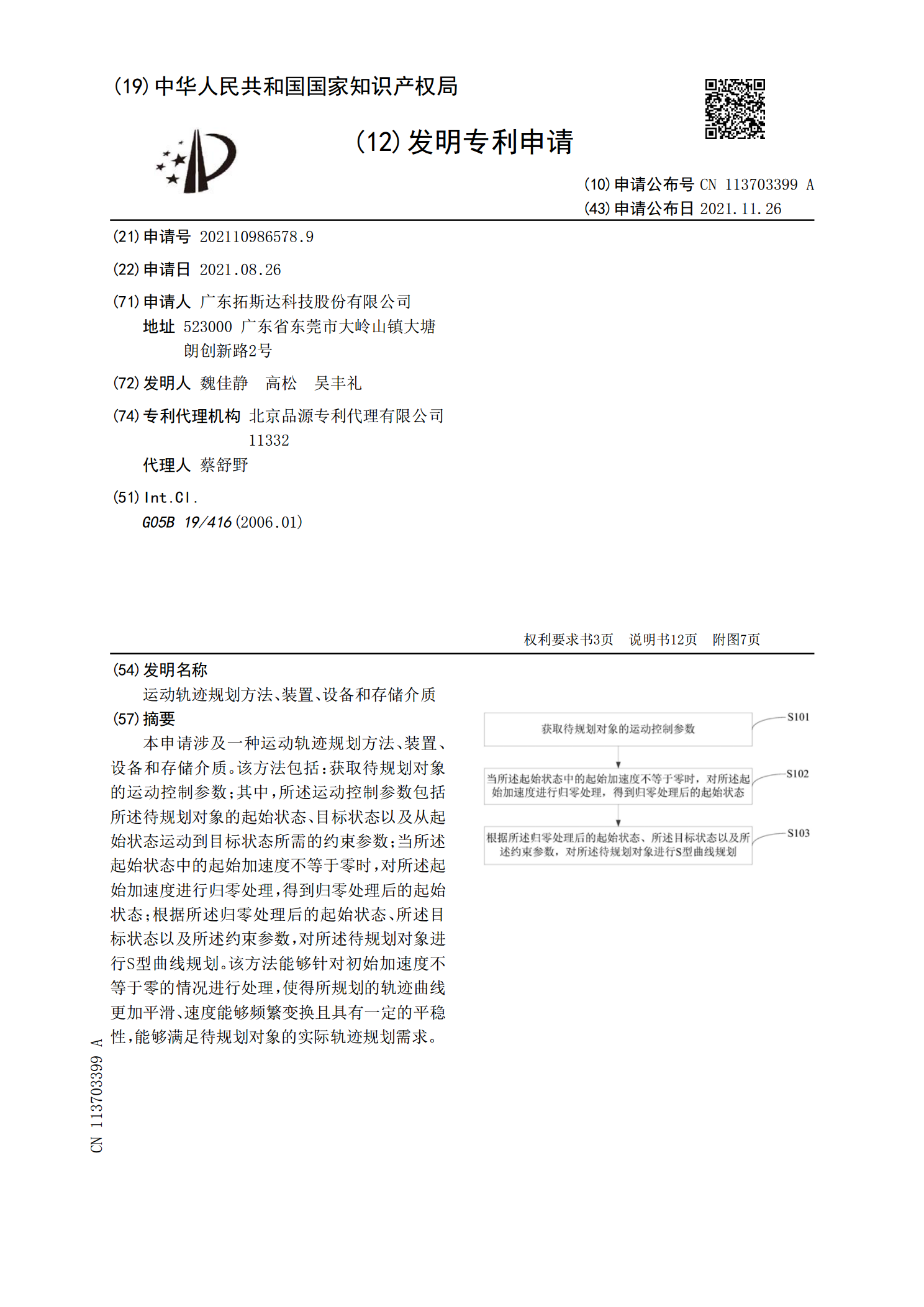
本申请涉及一种运动轨迹规划方法、装置、设备和存储介质。该方法包括:获取待规划对象的运动控制参数;其中,所述运动控制参数包括所述待规划对象的起始状态、目标状态以及从起始状态运动到目标状态所需的约束参数;当所述起始状态中的起始加速度不等于零时,对所述起始加速度进行归零处理,得到归零处理后的起始状态;根据所述归零处理后的起始状态、所述目标状态以及所述约束参数,对所述待规划对象进行S型曲线规划。该方法能够针对初始加速度不等于零的情况进行处理,使得所规划的轨迹曲线更加平滑、速度能够频繁变换且具有一定的平稳性,能够满