
运动轨迹规划方法、装置、设备和存储介质.pdf

景福****90


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
运动轨迹规划方法、装置、设备和存储介质.pdf
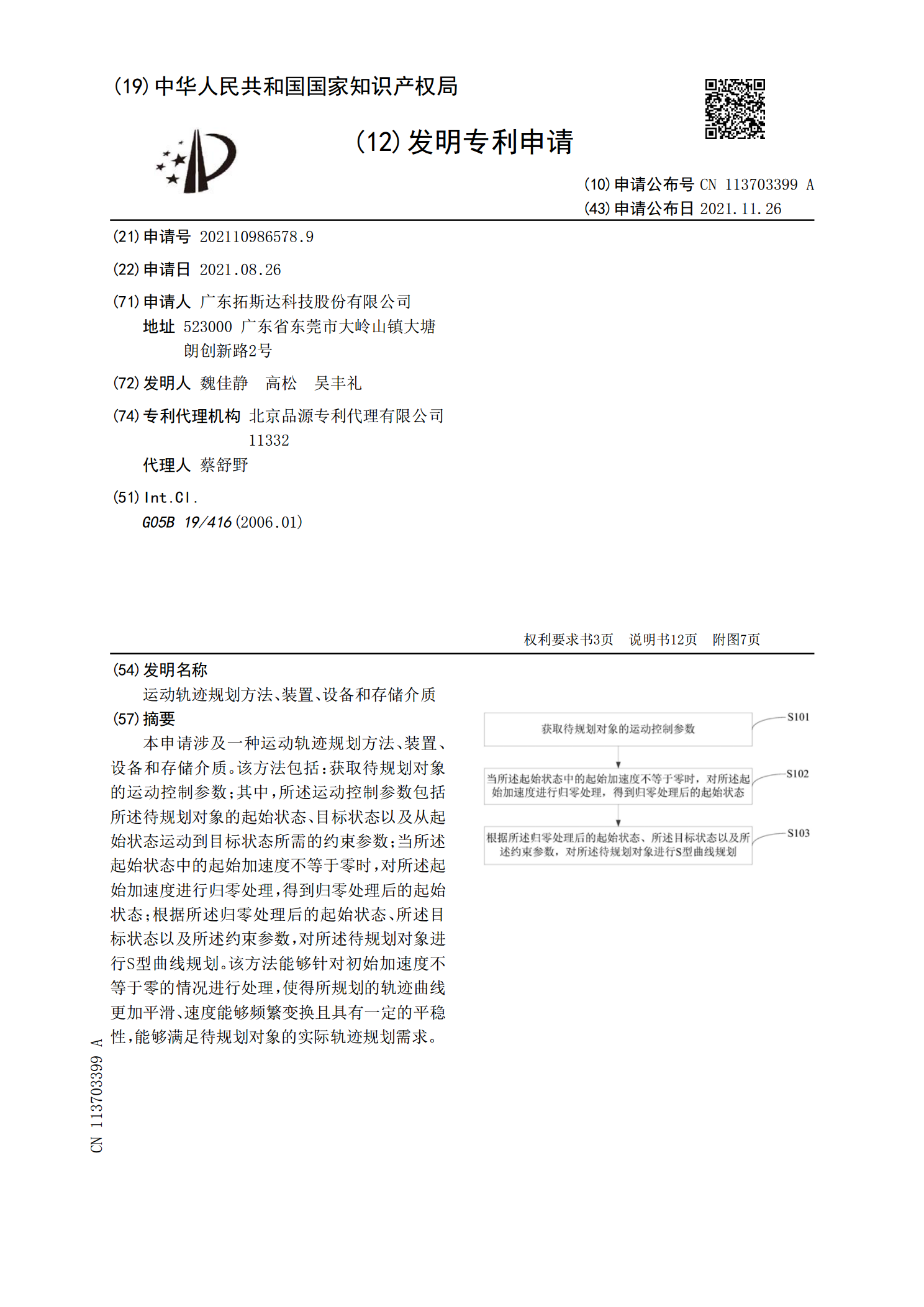
本申请涉及一种运动轨迹规划方法、装置、设备和存储介质。该方法包括:获取待规划对象的运动控制参数;其中,所述运动控制参数包括所述待规划对象的起始状态、目标状态以及从起始状态运动到目标状态所需的约束参数;当所述起始状态中的起始加速度不等于零时,对所述起始加速度进行归零处理,得到归零处理后的起始状态;根据所述归零处理后的起始状态、所述目标状态以及所述约束参数,对所述待规划对象进行S型曲线规划。该方法能够针对初始加速度不等于零的情况进行处理,使得所规划的轨迹曲线更加平滑、速度能够频繁变换且具有一定的平稳性,能够满

运动智能体轨迹规划方法、装置、存储介质和电子设备.pdf
本发明提供了一种运动智能体轨迹规划方法、装置、存储介质和电子设备,涉及轨迹规划技术领域。每次取开放队列中期望最小的节点作为当前节点,判断是否满足到达目标;若不满足,对当前节点的空间状态向多个运动方向进行拓展;再计算当前节点的停留允许时间段;进而计算期望到达时间段;以此构建新节点存入开放队列,重复执行,直至到达目标,则根据父节点从最终节点向前回溯找到起始节点,将回溯序列反转,提取对应的空间状态与时刻信息,输出最终轨迹。将时间维度考虑到规划过程中,将静态环境中的规划提升到动态环境中的规划。极大的降低了搜索空间
深度和自运动轨迹的估计方法、装置、设备及存储介质.pdf
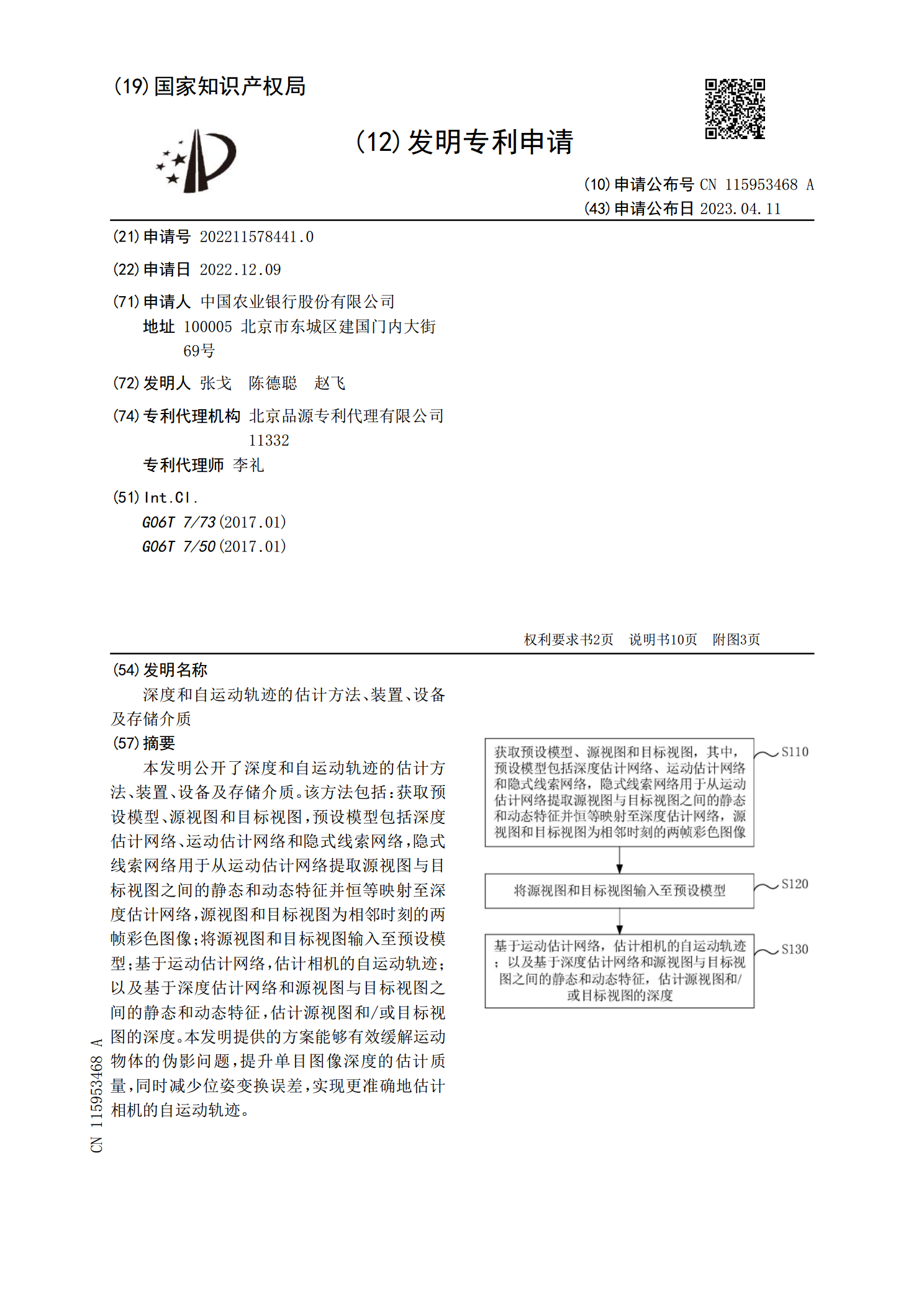
本发明公开了深度和自运动轨迹的估计方法、装置、设备及存储介质。该方法包括:获取预设模型、源视图和目标视图,预设模型包括深度估计网络、运动估计网络和隐式线索网络,隐式线索网络用于从运动估计网络提取源视图与目标视图之间的静态和动态特征并恒等映射至深度估计网络,源视图和目标视图为相邻时刻的两帧彩色图像;将源视图和目标视图输入至预设模型;基于运动估计网络,估计相机的自运动轨迹;以及基于深度估计网络和源视图与目标视图之间的静态和动态特征,估计源视图和/或目标视图的深度。本发明提供的方案能够有效缓解运动物体的伪影问题
车速轨迹规划方法、装置、设备及存储介质.pdf
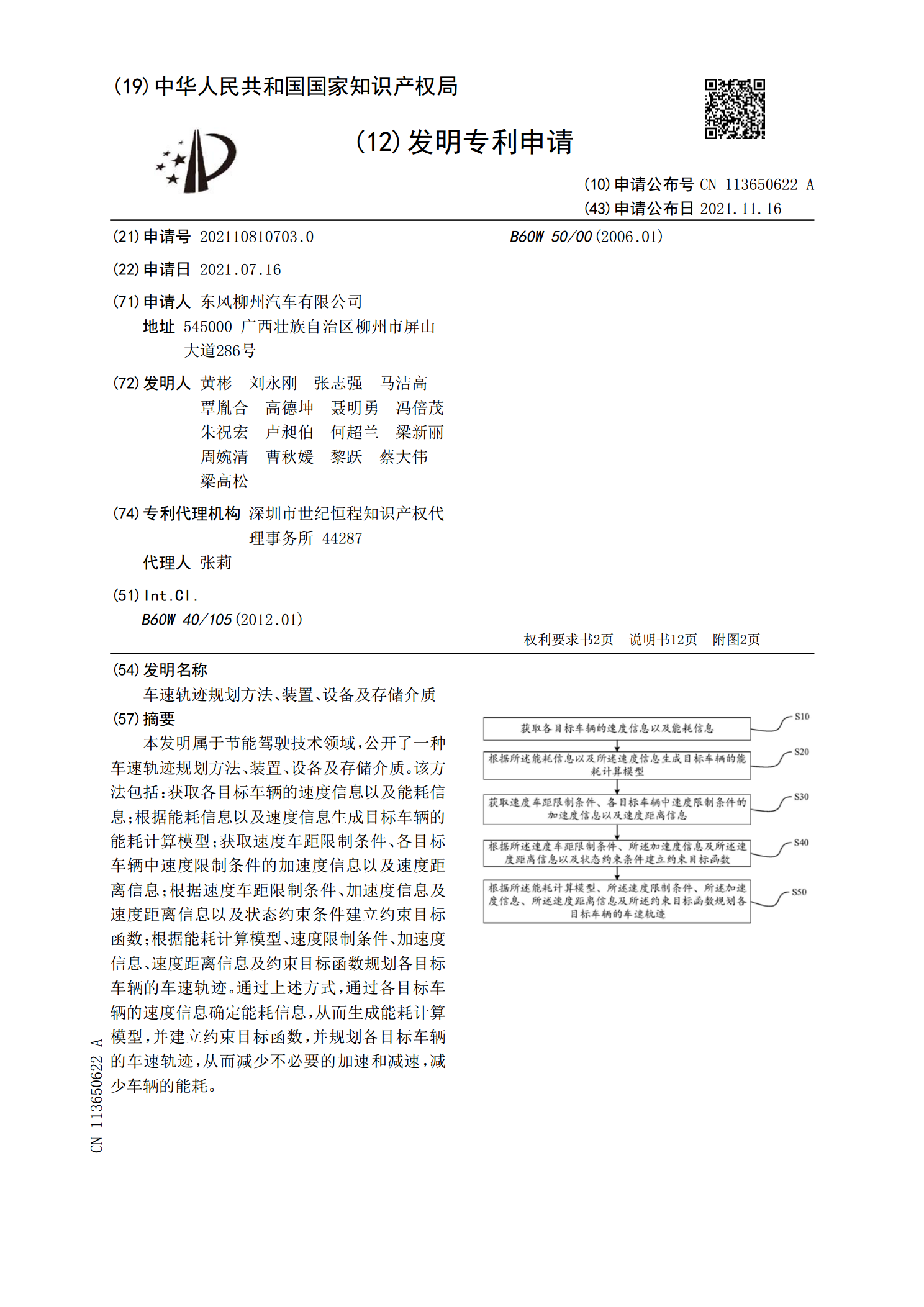
本发明属于节能驾驶技术领域,公开了一种车速轨迹规划方法、装置、设备及存储介质。该方法包括:获取各目标车辆的速度信息以及能耗信息;根据能耗信息以及速度信息生成目标车辆的能耗计算模型;获取速度车距限制条件、各目标车辆中速度限制条件的加速度信息以及速度距离信息;根据速度车距限制条件、加速度信息及速度距离信息以及状态约束条件建立约束目标函数;根据能耗计算模型、速度限制条件、加速度信息、速度距离信息及约束目标函数规划各目标车辆的车速轨迹。通过上述方式,通过各目标车辆的速度信息确定能耗信息,从而生成能耗计算模型,并建
一种轨迹规划方法、装置、设备和存储介质.pdf
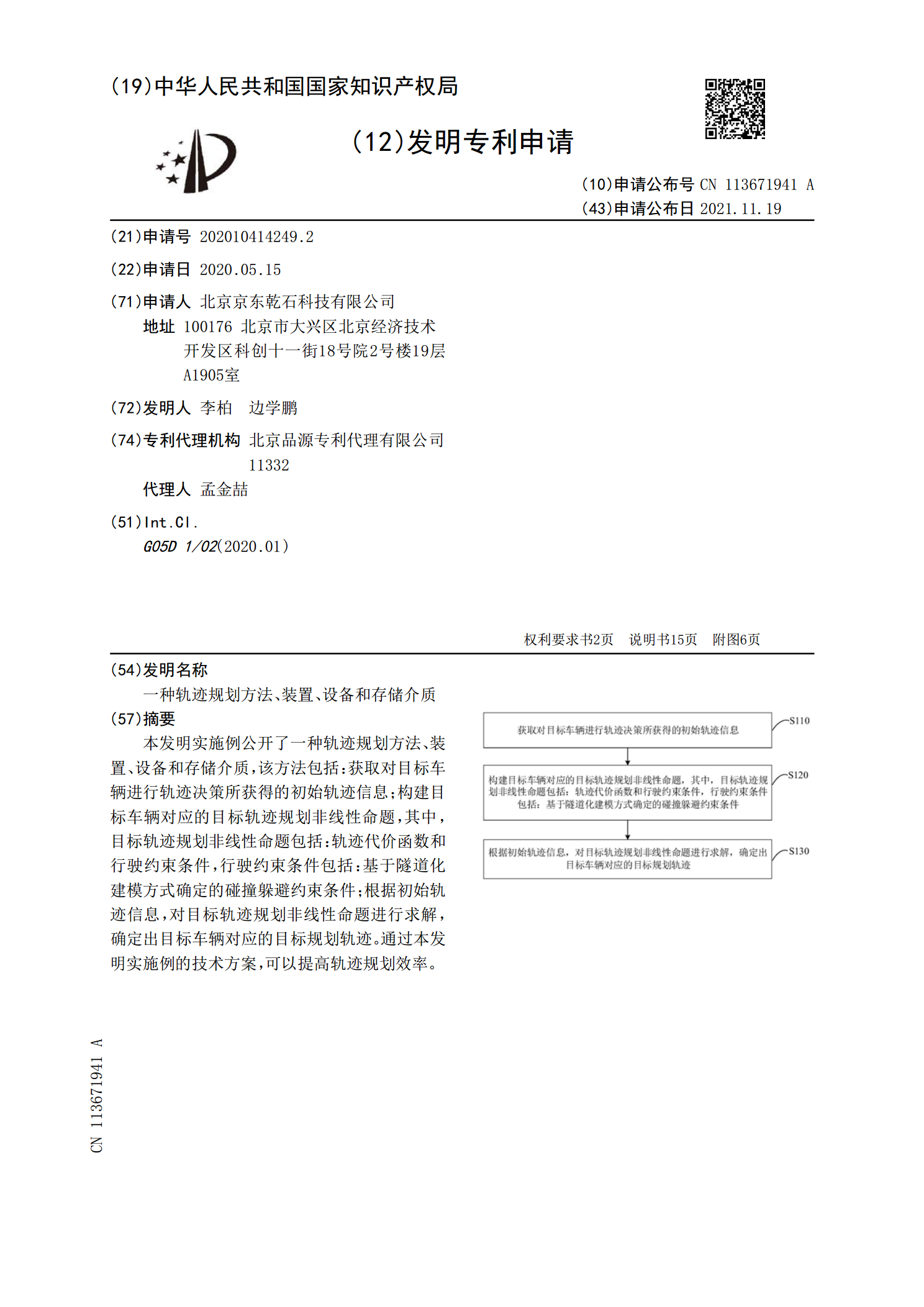
本发明实施例公开了一种轨迹规划方法、装置、设备和存储介质,该方法包括:获取对目标车辆进行轨迹决策所获得的初始轨迹信息;构建目标车辆对应的目标轨迹规划非线性命题,其中,目标轨迹规划非线性命题包括:轨迹代价函数和行驶约束条件,行驶约束条件包括:基于隧道化建模方式确定的碰撞躲避约束条件;根据初始轨迹信息,对目标轨迹规划非线性命题进行求解,确定出目标车辆对应的目标规划轨迹。通过本发明实施例的技术方案,可以提高轨迹规划效率。