
一种除草机器人.pdf

悠柔****找我


1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种除草装置、除草方法及除草机器人.pdf
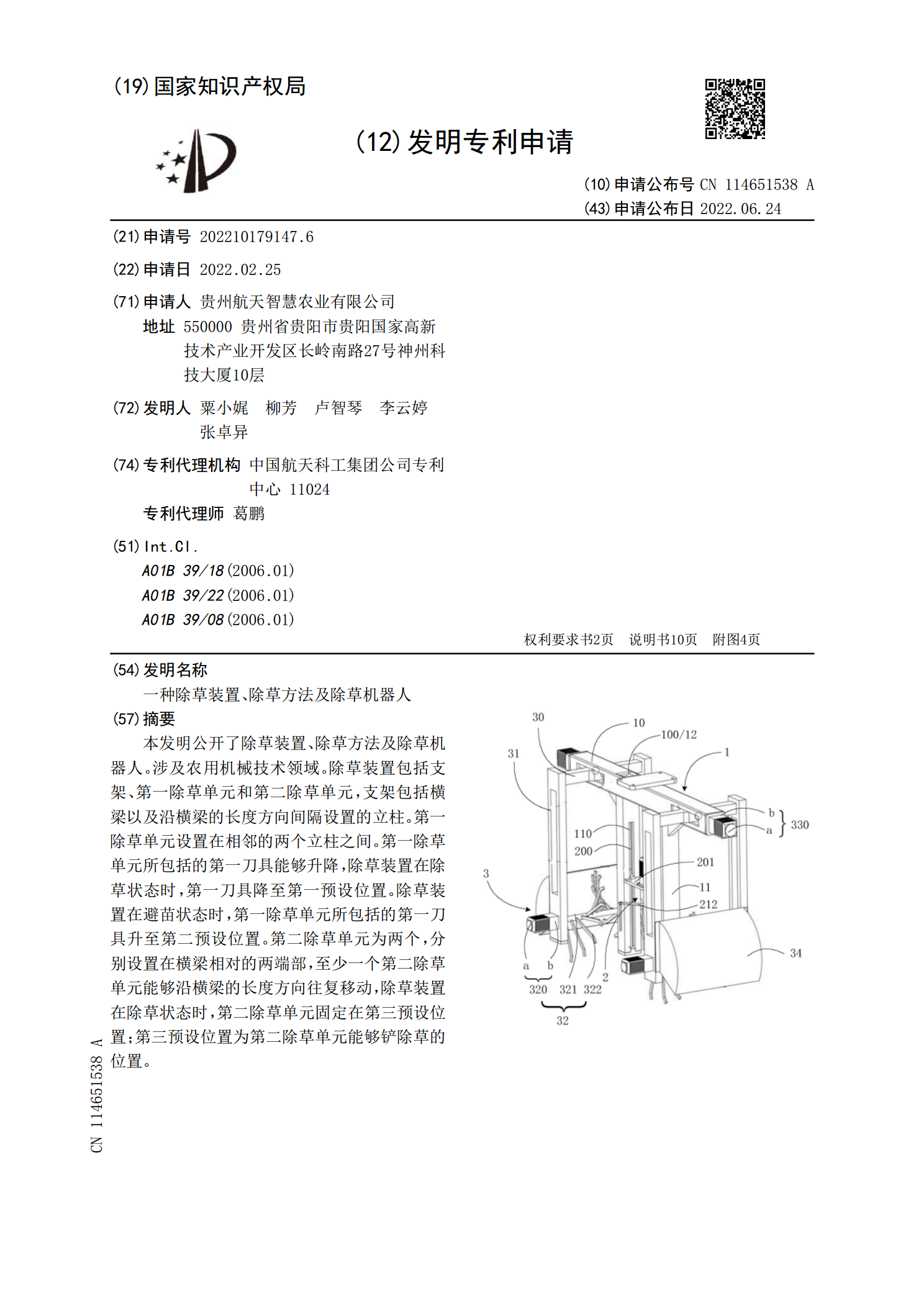
本发明公开了除草装置、除草方法及除草机器人。涉及农用机械技术领域。除草装置包括支架、第一除草单元和第二除草单元,支架包括横梁以及沿横梁的长度方向间隔设置的立柱。第一除草单元设置在相邻的两个立柱之间。第一除草单元所包括的第一刀具能够升降,除草装置在除草状态时,第一刀具降至第一预设位置。除草装置在避苗状态时,第一除草单元所包括的第一刀具升至第二预设位置。第二除草单元为两个,分别设置在横梁相对的两端部,至少一个第二除草单元能够沿横梁的长度方向往复移动,除草装置在除草状态时,第二除草单元固定在第三预设位置;第三预
一种除草效果好的除草机器人.pdf
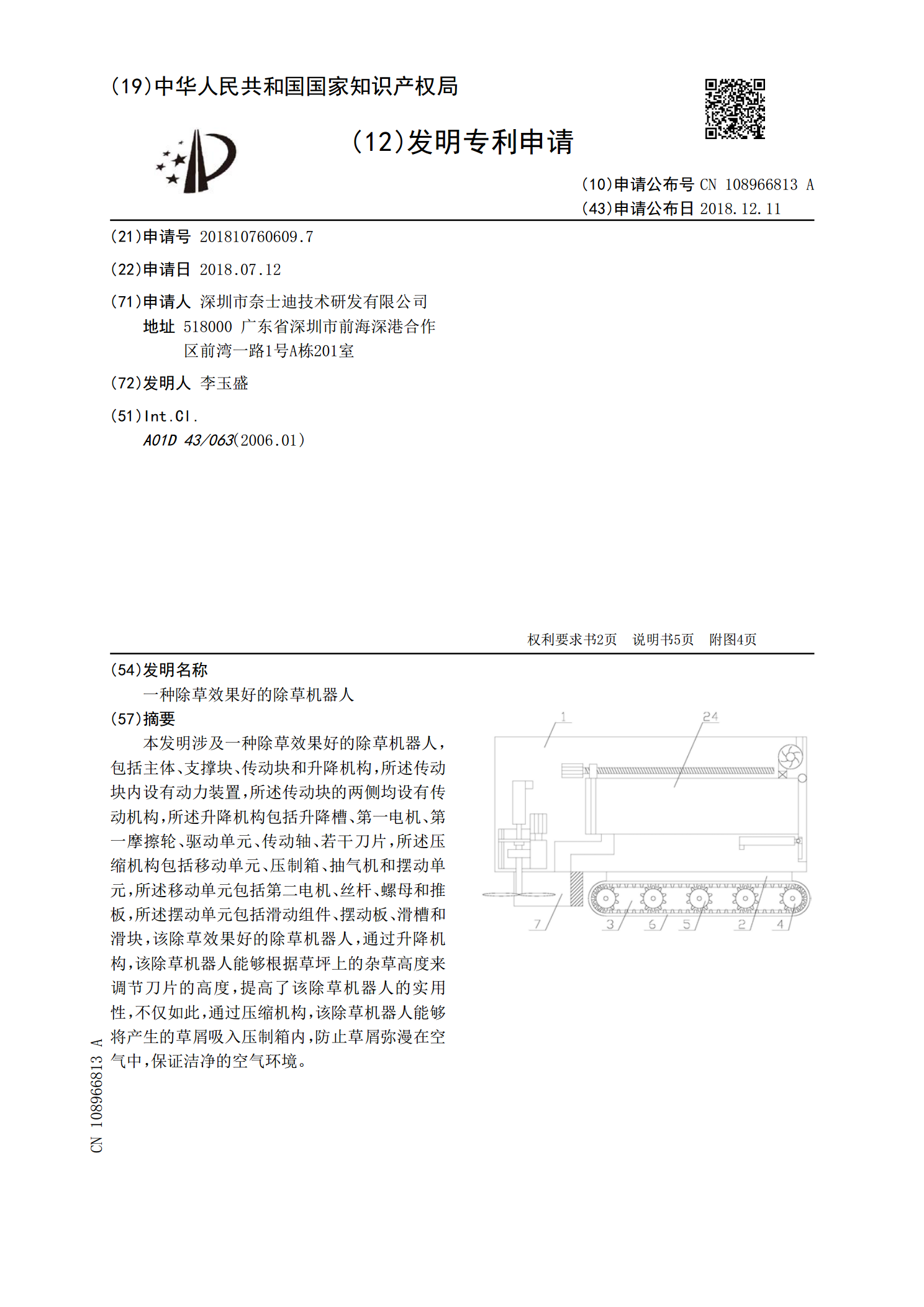
本发明涉及一种除草效果好的除草机器人,包括主体、支撑块、传动块和升降机构,所述传动块内设有动力装置,所述传动块的两侧均设有传动机构,所述升降机构包括升降槽、第一电机、第一摩擦轮、驱动单元、传动轴、若干刀片,所述压缩机构包括移动单元、压制箱、抽气机和摆动单元,所述移动单元包括第二电机、丝杆、螺母和推板,所述摆动单元包括滑动组件、摆动板、滑槽和滑块,该除草效果好的除草机器人,通过升降机构,该除草机器人能够根据草坪上的杂草高度来调节刀片的高度,提高了该除草机器人的实用性,不仅如此,通过压缩机构,该除草机器人能够
一种除草机器人.pdf
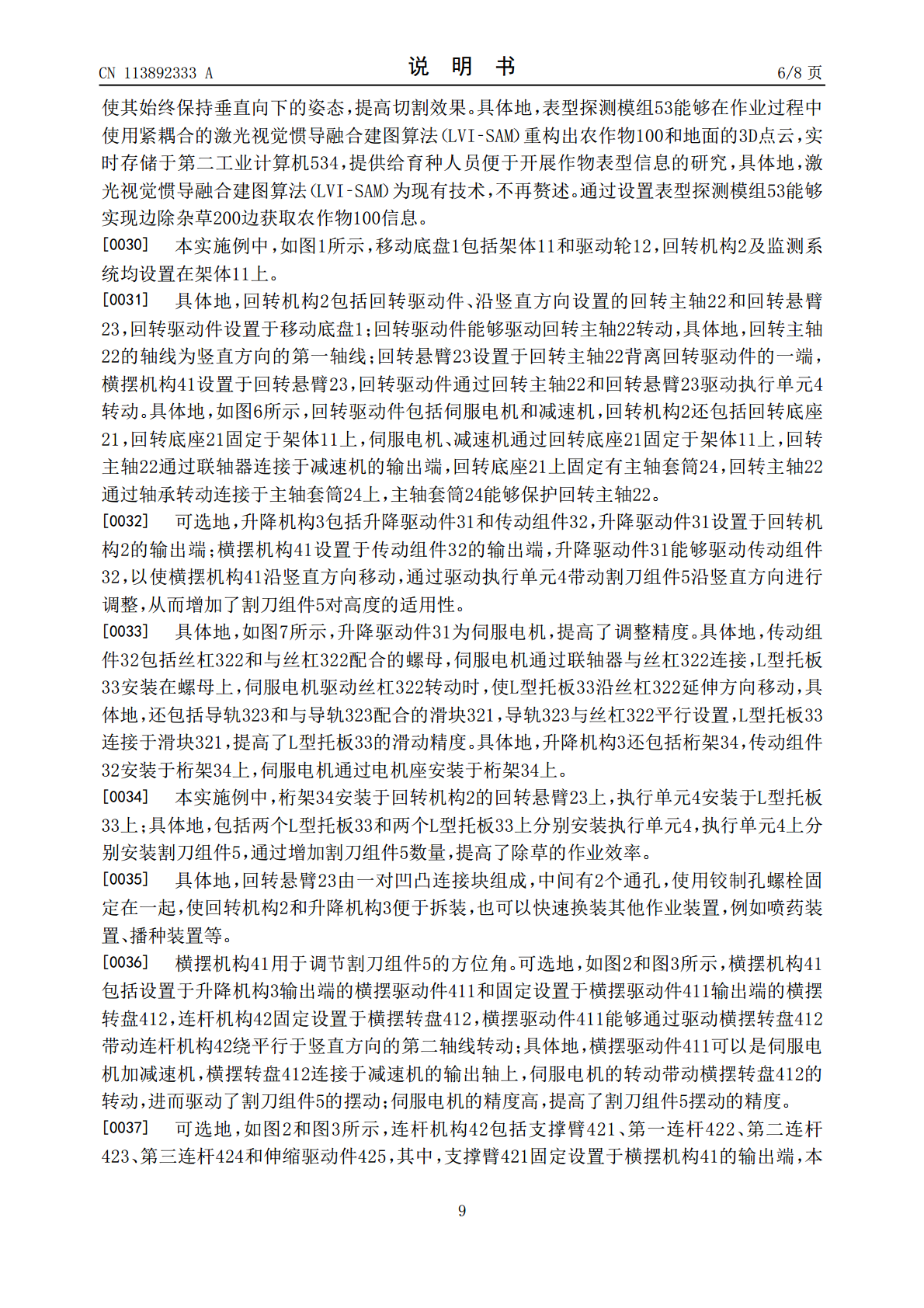
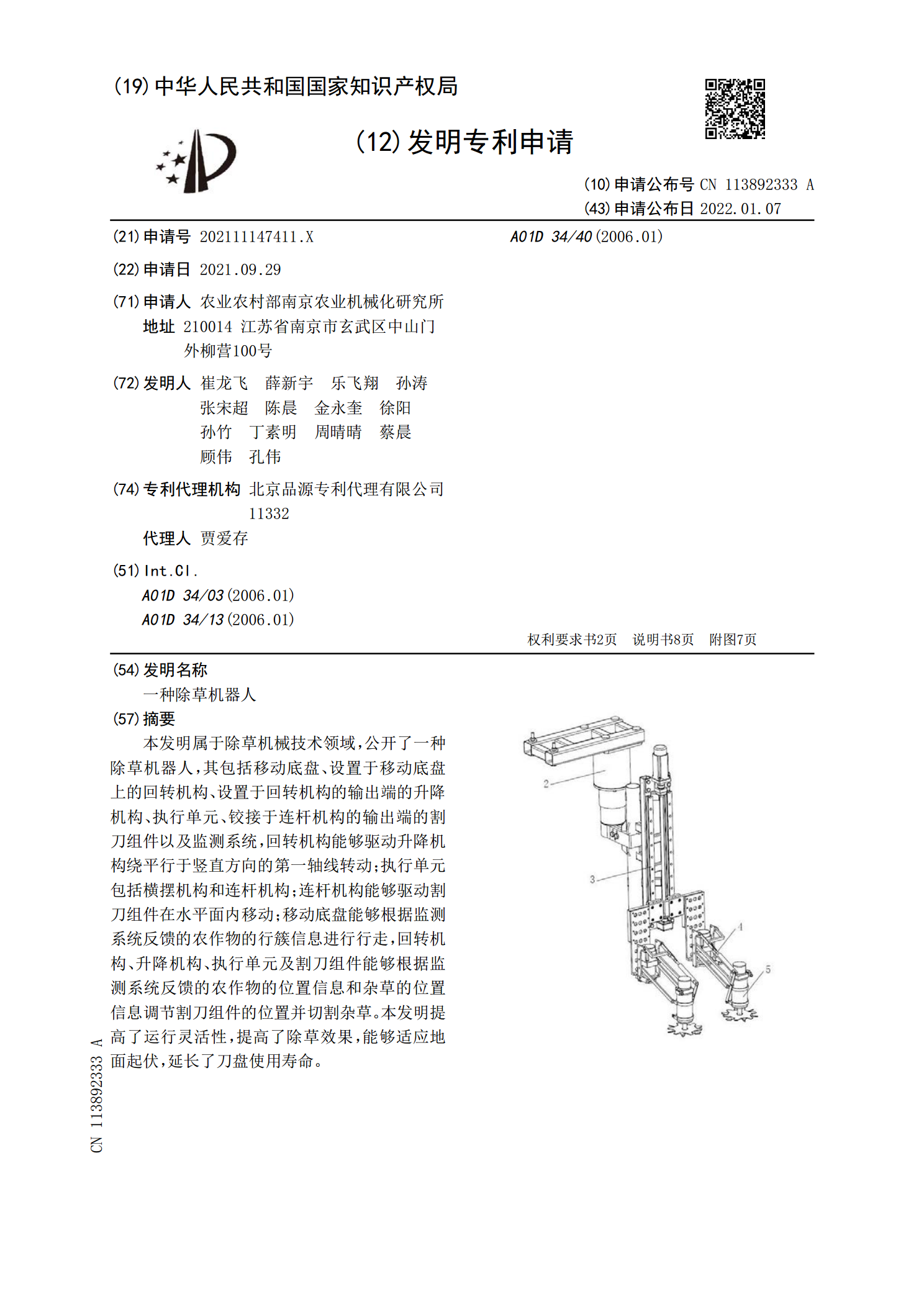
本发明属于除草机械技术领域,公开了一种除草机器人,其包括移动底盘、设置于移动底盘上的回转机构、设置于回转机构的输出端的升降机构、执行单元、铰接于连杆机构的输出端的割刀组件以及监测系统,回转机构能够驱动升降机构绕平行于竖直方向的第一轴线转动;执行单元包括横摆机构和连杆机构;连杆机构能够驱动割刀组件在水平面内移动;移动底盘能够根据监测系统反馈的农作物的行簇信息进行行走,回转机构、升降机构、执行单元及割刀组件能够根据监测系统反馈的农作物的位置信息和杂草的位置信息调节割刀组件的位置并切割杂草。本发明提高了运行灵活

一种园林除草机器人.pdf
本发明公开一种园林除草机器人,包括车体、两个后轮安装架和两个后轮、两个后轮电机等;两个后轮电机分别安装在两个后轮安装架上,转向架一端转动安装在车体下方;前轮转向电机主轴上安装有转向主齿轮,转向主齿轮与转向从齿轮相互啮合;两个竖直滑块分别滑动安装在两个竖直安装架上;两个水平电动推杆的壳体分别安装在两个水平安装架上,两个水平电动推杆的活塞杆端部分别与两个水平滑块相连;所述的两个外切齿内部分别安装有两个除草头安装架;两个切割从齿轮分别转动安装在两个除草头安装架上。本发明通过设置有便于行走的车体和灵活调整的切割装

一种园林用除草机器人.pdf
本发明涉及园林技术领域,且公开了一种园林用除草机器人,包括机体,所述机体的内部开设有空腔,所述机体的底部中段插接有一端位于空腔的进料管,所述进料管的内腔顶壁固定安装有阀门,所述进料管的外表面两端顶部均固定安装有扭簧,所述扭簧远离进料管的一端固定安装有挡板,所述空腔的内腔壁两端均固定安装有与挡板相连接的挡块,所述进料管内腔壁底部固定安装有吸风机。该园林用除草机器人,通过在机体的底部安装的与割草箱相连接的支撑柱,使装置在使用的时候更加的稳定,以及安装的弹簧、移动板和滑轮,使装置在移动的时候起到了减震的效果,使