
一种用于田间作物检测的行走装置.pdf

邻家****mk

1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于田间作物检测的行走装置.pdf
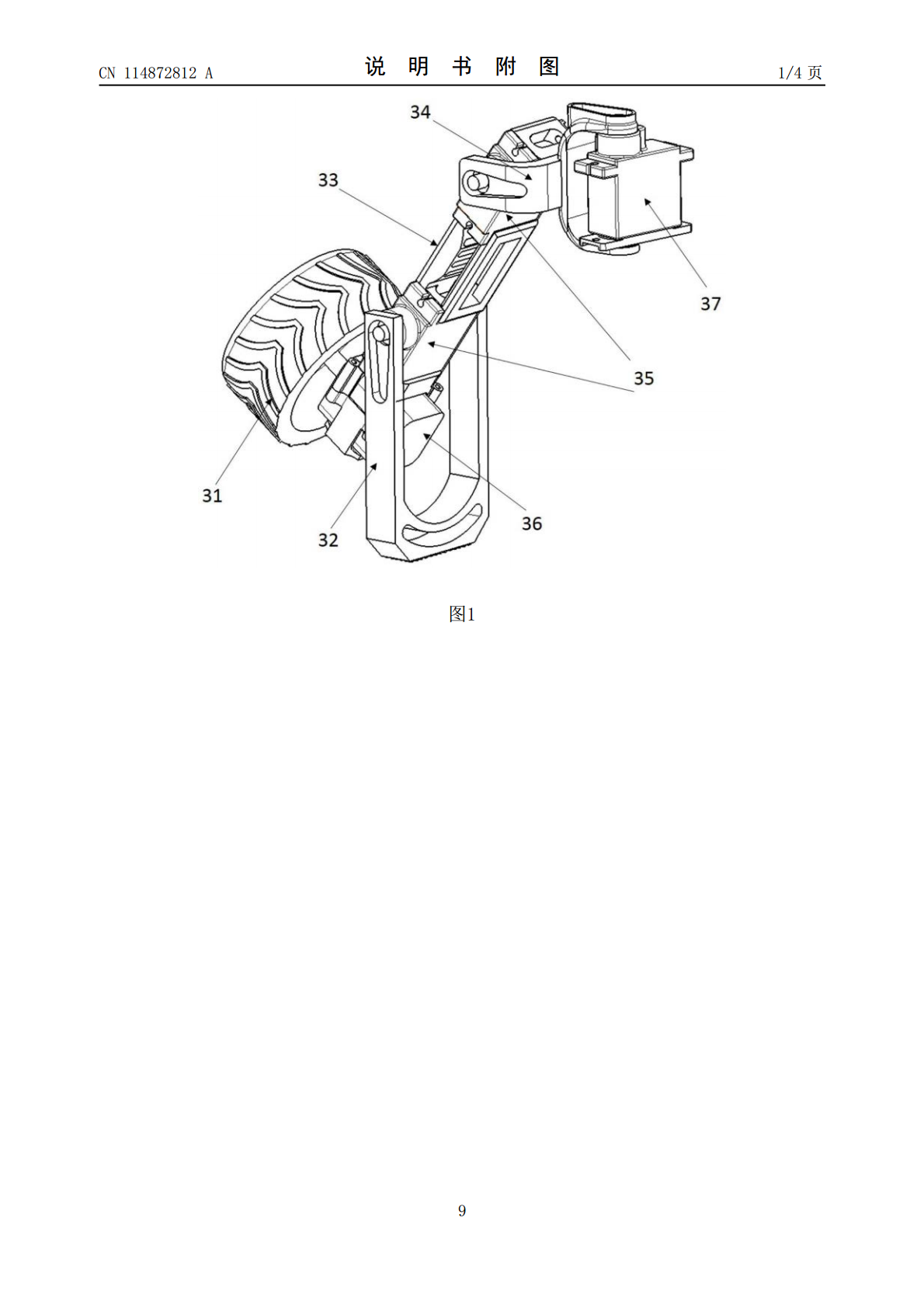
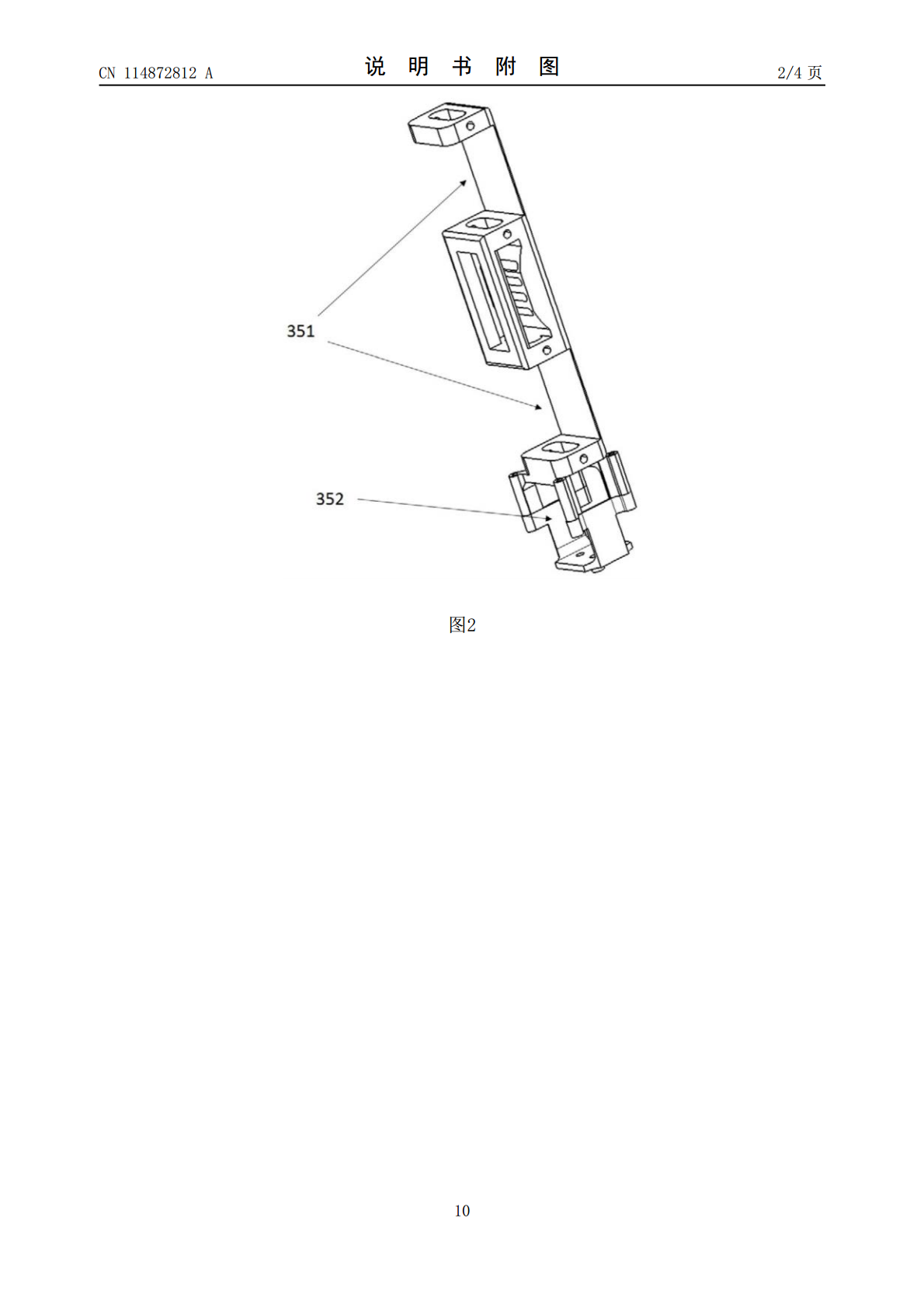
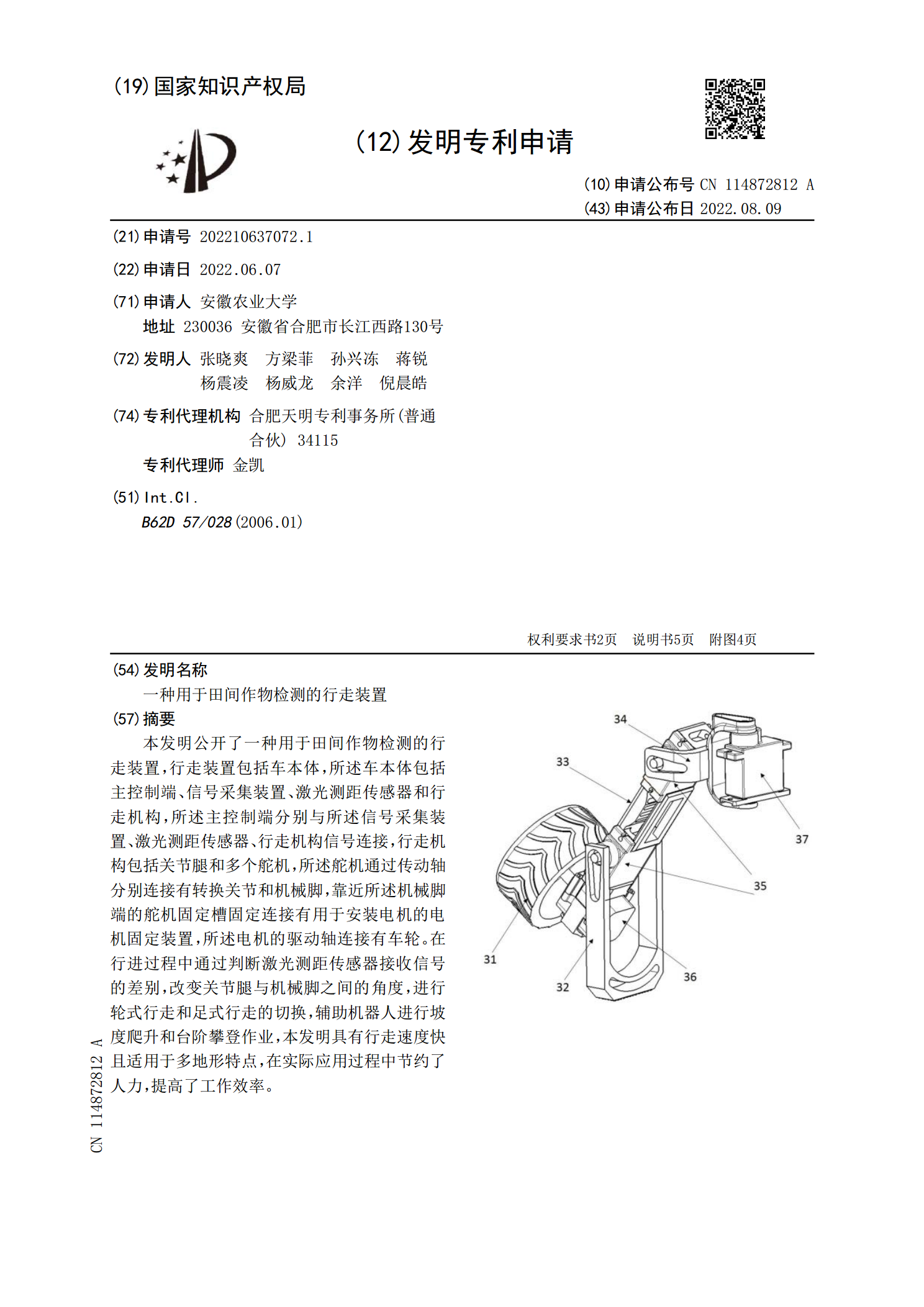
本发明公开了一种用于田间作物检测的行走装置,行走装置包括车本体,所述车本体包括主控制端、信号采集装置、激光测距传感器和行走机构,所述主控制端分别与所述信号采集装置、激光测距传感器、行走机构信号连接,行走机构包括关节腿和多个舵机,所述舵机通过传动轴分别连接有转换关节和机械脚,靠近所述机械脚端的舵机固定槽固定连接有用于安装电机的电机固定装置,所述电机的驱动轴连接有车轮。在行进过程中通过判断激光测距传感器接收信号的差别,改变关节腿与机械脚之间的角度,进行轮式行走和足式行走的切换,辅助机器人进行坡度爬升和台阶攀登
一种用于农作物田间地膜打孔装置.pdf
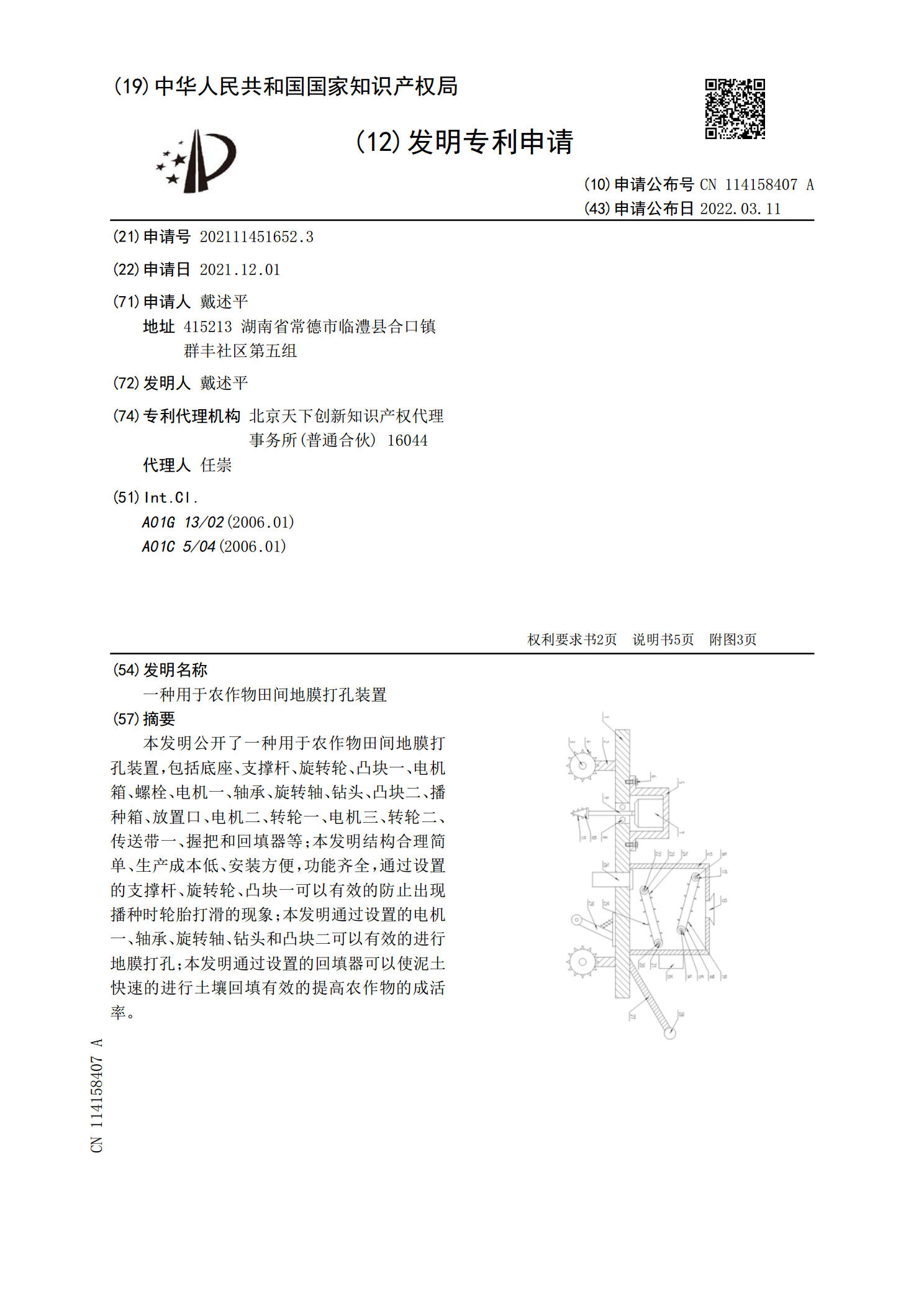
本发明公开了一种用于农作物田间地膜打孔装置,包括底座、支撑杆、旋转轮、凸块一、电机箱、螺栓、电机一、轴承、旋转轴、钻头、凸块二、播种箱、放置口、电机二、转轮一、电机三、转轮二、传送带一、握把和回填器等;本发明结构合理简单、生产成本低、安装方便,功能齐全,通过设置的支撑杆、旋转轮、凸块一可以有效的防止出现播种时轮胎打滑的现象;本发明通过设置的电机一、轴承、旋转轴、钻头和凸块二可以有效的进行地膜打孔;本发明通过设置的回填器可以使泥土快速的进行土壤回填有效的提高农作物的成活率。

一种用于田间作物光谱信息获取的装置.pdf
本发明公开了一种用于田间作物光谱信息获取的装置,包括平台主体、轮距调节机构、平台升降机构和至少两个独立行走机构,所述独立行走机构分别设置在所述平台主体的两侧,各所述独立行走机构分别与一所述平台升降机构的下端固定连接,所述轮距调节机构活动连接在所述平台升降机构上,所述轮距调节机构能够沿所述平台升降机构上下移动,所述轮距调节机构能够调节所述平台主体两侧的所述独立行走机构之间的宽度,所述平台主体固定在所述轮距调节机构上,所述平台主体上用于放置光谱相机。本发明使光谱信息获取装置适用于不同株高、不同种植宽度的多种作

一种用于板材检测的行走装置.pdf
本发明公开了一种用于板材检测的行走装置,包括X向步进电机、X向位置编码器、系统控制机箱、X向滑动模组、检测探头模组、以及在X向滑动模组两侧下端分别对称设置的Y向步进电机、Y向激光测距仪、Y向驱动齿轮组、Y向行走驱动轮、Y向行走履带、Y向行走履带压轮以及连接板。该行走装置可以行走于整个待测板材表面,实现对板材的全覆盖检测,实际使用表明,其结构简单、便携,使用方便,成本低廉。
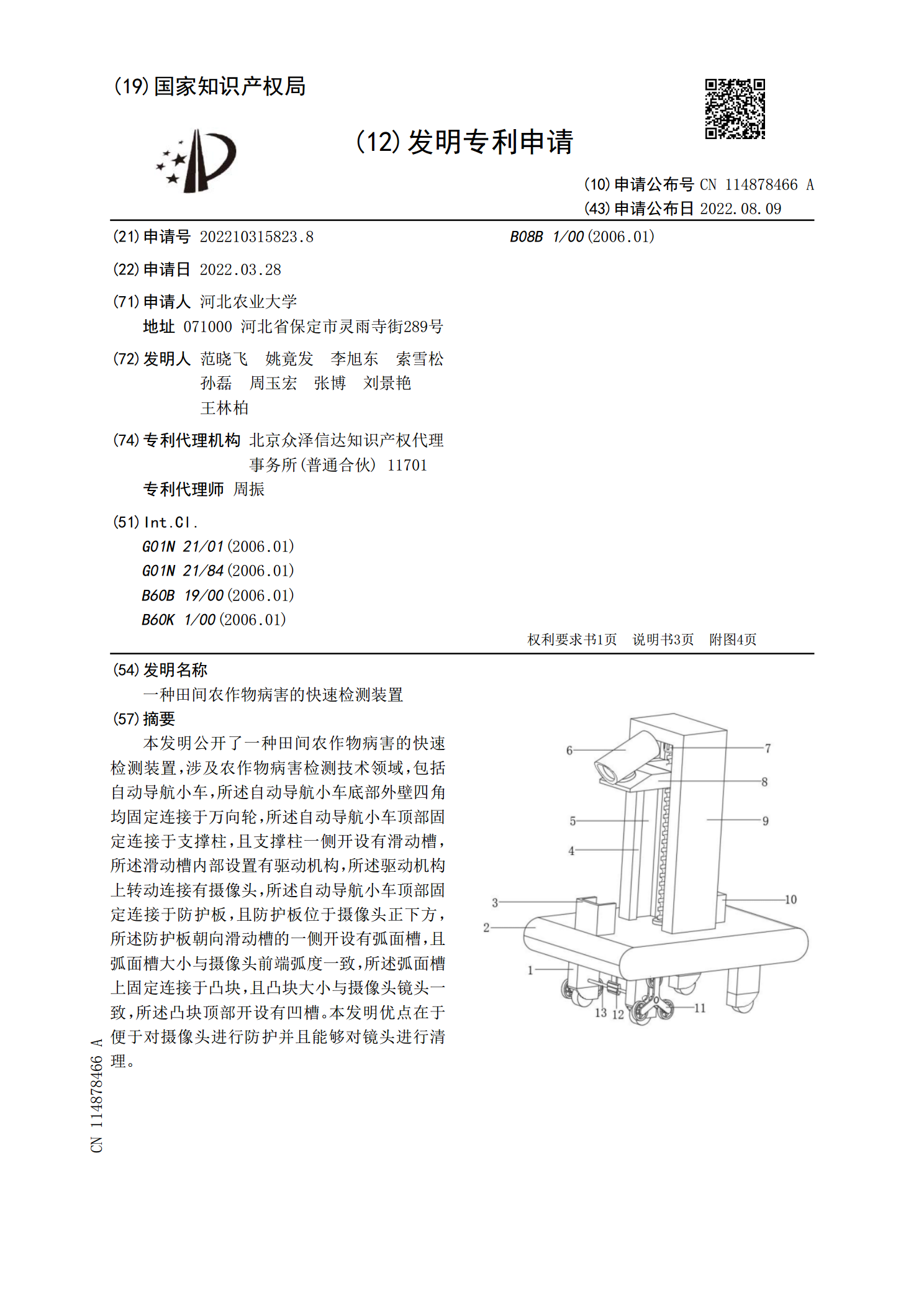
一种田间农作物病害的快速检测装置.pdf
本发明公开了一种田间农作物病害的快速检测装置,涉及农作物病害检测技术领域,包括自动导航小车,所述自动导航小车底部外壁四角均固定连接于万向轮,所述自动导航小车顶部固定连接于支撑柱,且支撑柱一侧开设有滑动槽,所述滑动槽内部设置有驱动机构,所述驱动机构上转动连接有摄像头,所述自动导航小车顶部固定连接于防护板,且防护板位于摄像头正下方,所述防护板朝向滑动槽的一侧开设有弧面槽,且弧面槽大小与摄像头前端弧度一致,所述弧面槽上固定连接于凸块,且凸块大小与摄像头镜头一致,所述凸块顶部开设有凹槽。本发明优点在于便于对摄像头