
一种基于旋转台的多视角点云自主配准方法及应用.pdf

邻家****ng

1/10
2/10
3/10

4/10
5/10
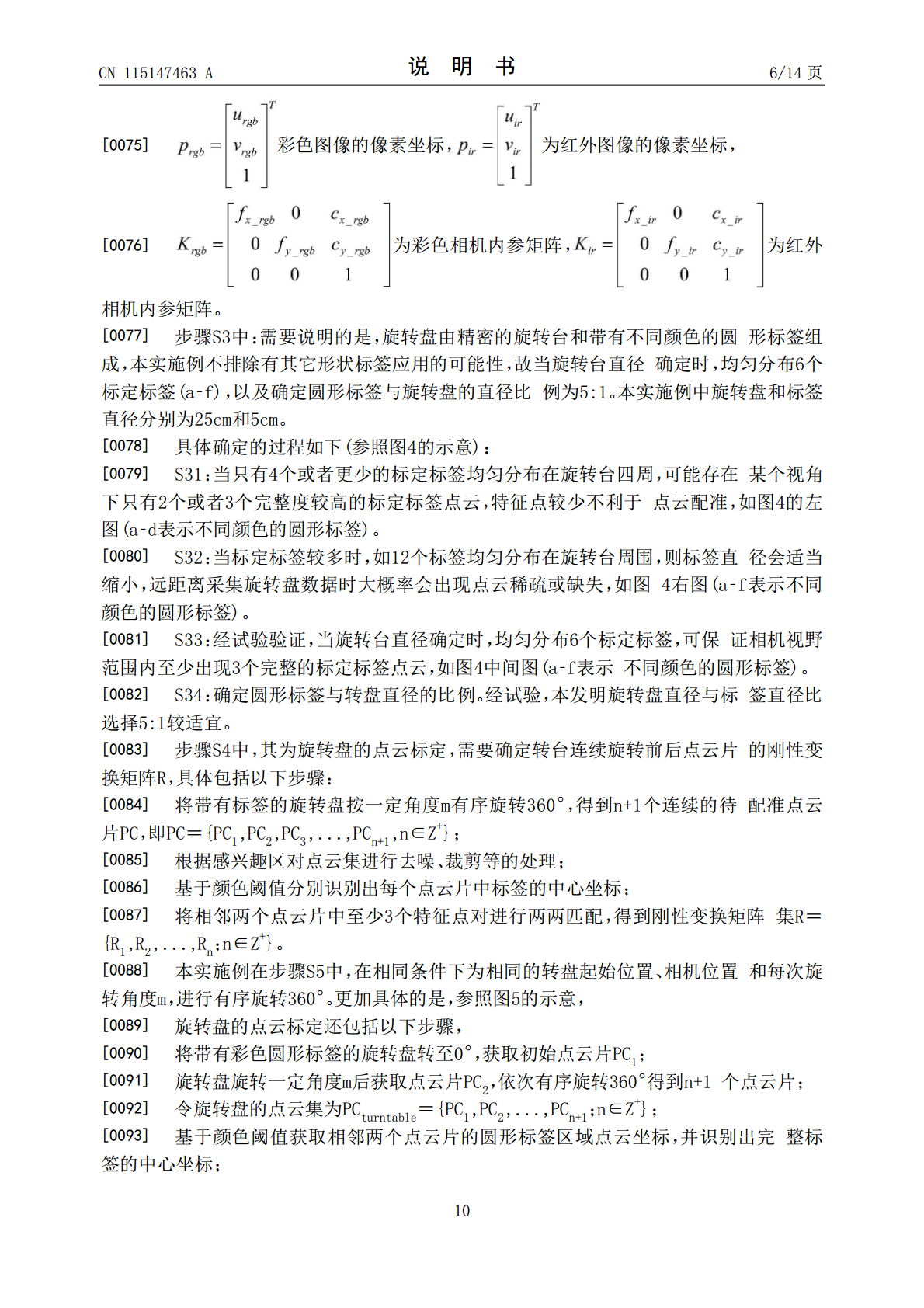
6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于旋转台的多视角点云自主配准方法及应用.pdf
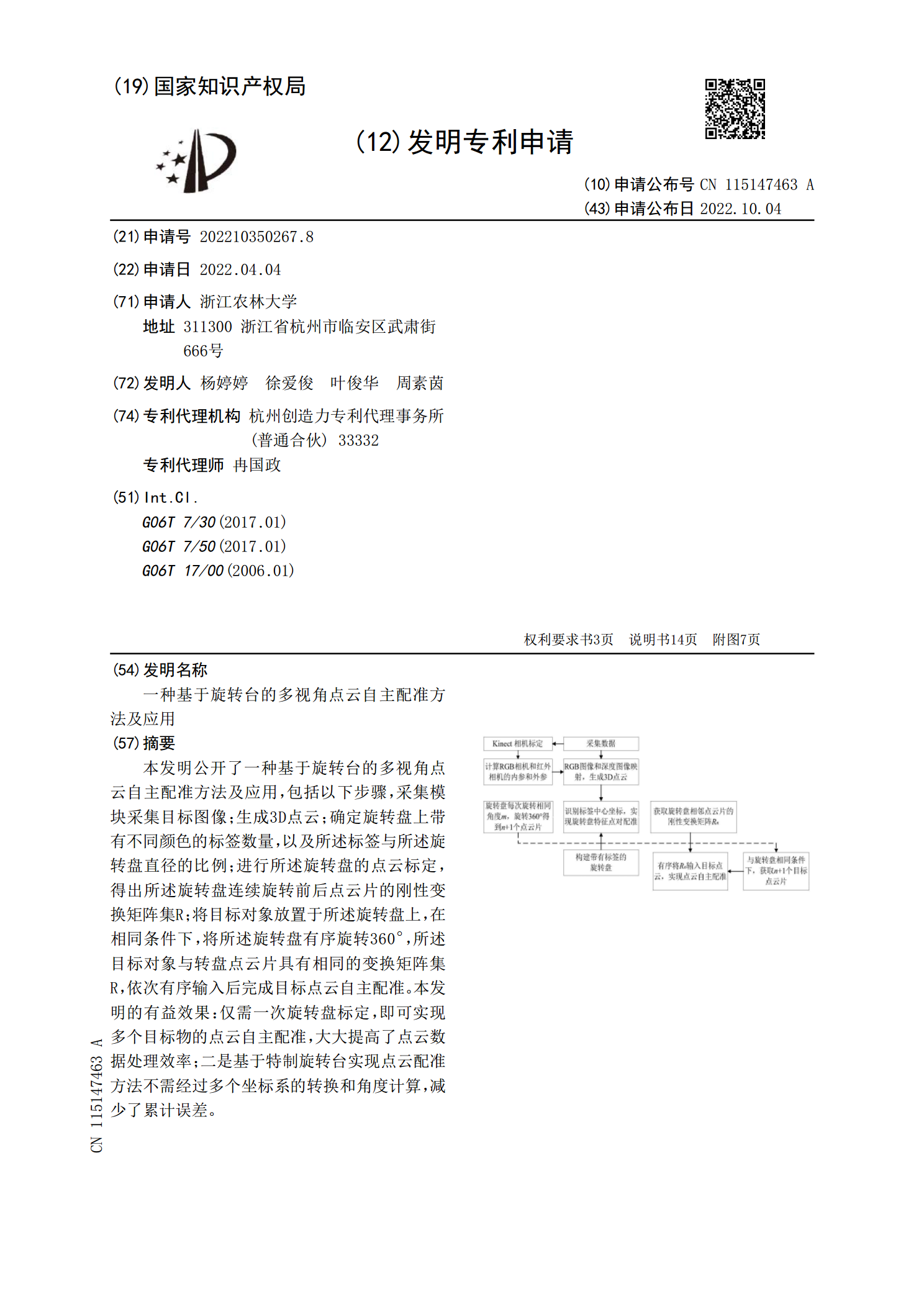
本发明公开了一种基于旋转台的多视角点云自主配准方法及应用,包括以下步骤,采集模块采集目标图像;生成3D点云;确定旋转盘上带有不同颜色的标签数量,以及所述标签与所述旋转盘直径的比例;进行所述旋转盘的点云标定,得出所述旋转盘连续旋转前后点云片的刚性变换矩阵集R;将目标对象放置于所述旋转盘上,在相同条件下,将所述旋转盘有序旋转360°,所述目标对象与转盘点云片具有相同的变换矩阵集R,依次有序输入后完成目标点云自主配准。本发明的有益效果:仅需一次旋转盘标定,即可实现多个目标物的点云自主配准,大大提高了点云数据处理
基于非线性优化的多视角点云配准方法及系统.pdf
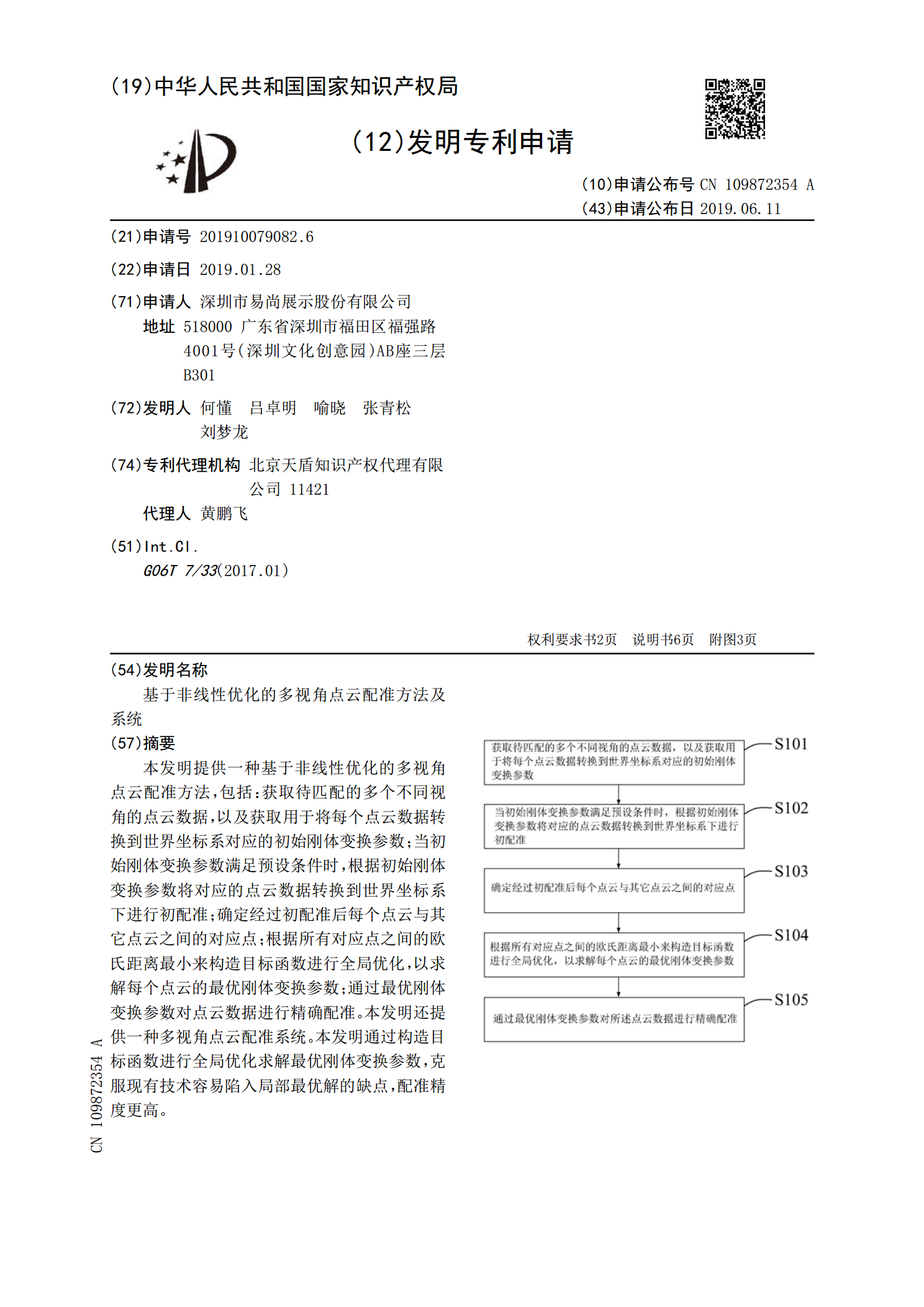
本发明提供一种基于非线性优化的多视角点云配准方法,包括:获取待匹配的多个不同视角的点云数据,以及获取用于将每个点云数据转换到世界坐标系对应的初始刚体变换参数;当初始刚体变换参数满足预设条件时,根据初始刚体变换参数将对应的点云数据转换到世界坐标系下进行初配准;确定经过初配准后每个点云与其它点云之间的对应点;根据所有对应点之间的欧氏距离最小来构造目标函数进行全局优化,以求解每个点云的最优刚体变换参数;通过最优刚体变换参数对点云数据进行精确配准。本发明还提供一种多视角点云配准系统。本发明通过构造目标函数进行全局

基于位姿参数估计的多视角点云配准方法.docx
基于位姿参数估计的多视角点云配准方法1.内容概要本文提出了一种基于位姿参数估计的多视角点云配准方法,旨在解决多视角图像在三维重建过程中可能出现的位姿一致性问题。该方法首先根据输入的多视角点云数据和相机标定信息,估计出每个相机的位姿参数。通过最小二乘法计算各个相机之间的位姿误差,并利用RANSAC算法去除异常值。根据得到的位姿参数对点云数据进行配准,从而实现多视角点云数据的融合。实验结果表明,该方法在处理具有不同姿态和尺度的多视角点云数据时具有较好的性能。1.1研究背景随着计算机视觉、机器人技术和虚拟现实等

基于双目结构光的工件点云构建与多视角配准方法研究的开题报告.docx
基于双目结构光的工件点云构建与多视角配准方法研究的开题报告一、选题背景和意义在工件质量检测、三维重构和自动化生产中,点云构建和多视角配准技术很重要。传统的三维扫描技术受到许多限制,如成像速度、颜色还原和可见性问题等。双目结构光成像技术结合多视角配准算法是一种有效的解决方案,可以提高三维成像质量,增加成像速度,实现更高效的3D模型重建。本课题的主要研究内容是基于双目结构光的工件点云构建与多视角配准方法,旨在解决电子制造和汽车工业中出现的几何误差检测、尺寸检测和装配问题等。二、研究内容和思路1.双目结构光算法
基于多视角点云配准的岸线三维重建装置及方法.pdf
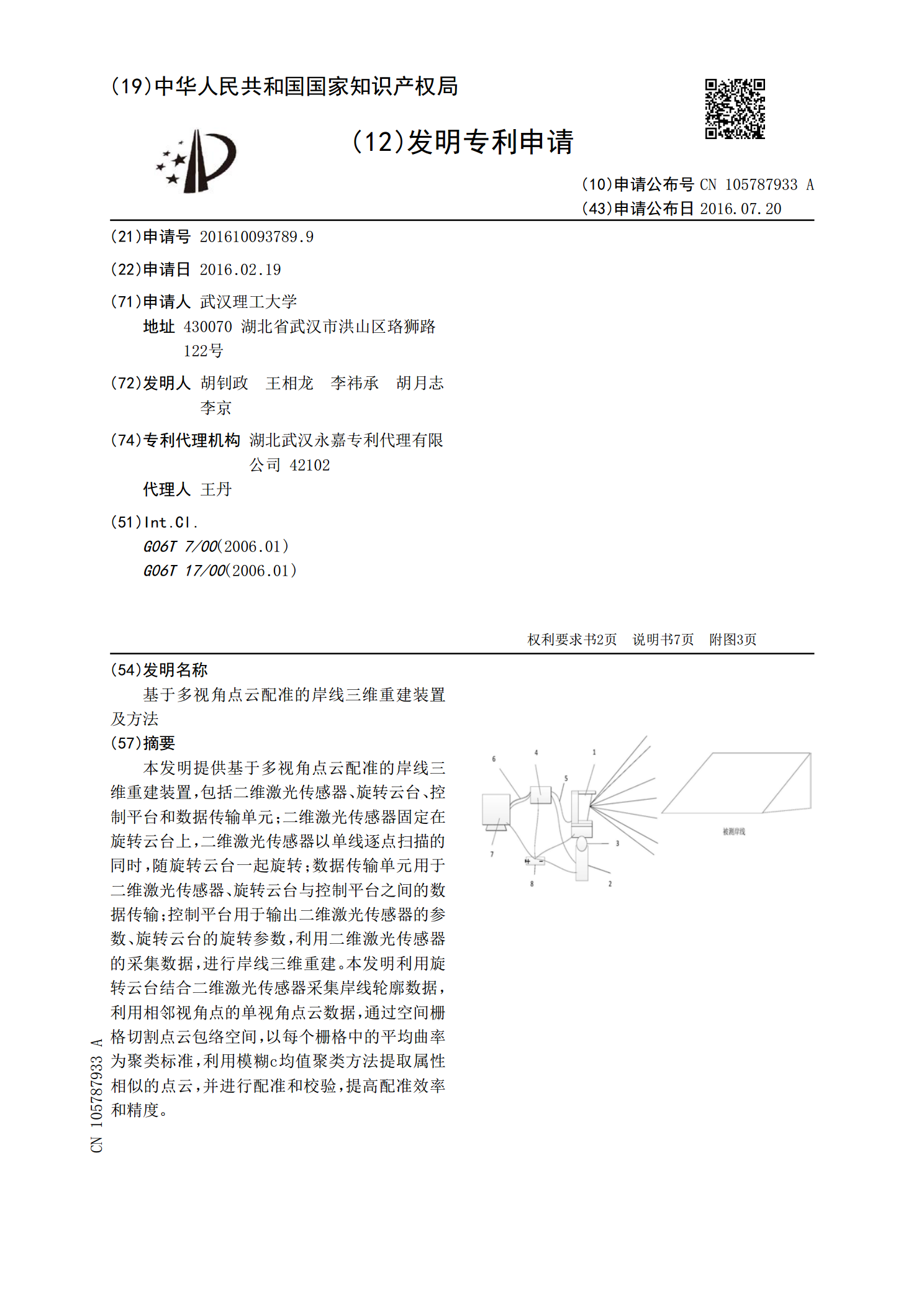
本发明提供基于多视角点云配准的岸线三维重建装置,包括二维激光传感器、旋转云台、控制平台和数据传输单元;二维激光传感器固定在旋转云台上,二维激光传感器以单线逐点扫描的同时,随旋转云台一起旋转;数据传输单元用于二维激光传感器、旋转云台与控制平台之间的数据传输;控制平台用于输出二维激光传感器的参数、旋转云台的旋转参数,利用二维激光传感器的采集数据,进行岸线三维重建。本发明利用旋转云台结合二维激光传感器采集岸线轮廓数据,利用相邻视角点的单视角点云数据,通过空间栅格切割点云包络空间,以每个栅格中的平均曲率为聚类标准