
一种夹剪一体荔枝采摘末端执行器和一种荔枝采摘机器人.pdf

念珊****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种夹剪一体荔枝采摘末端执行器和一种荔枝采摘机器人.pdf
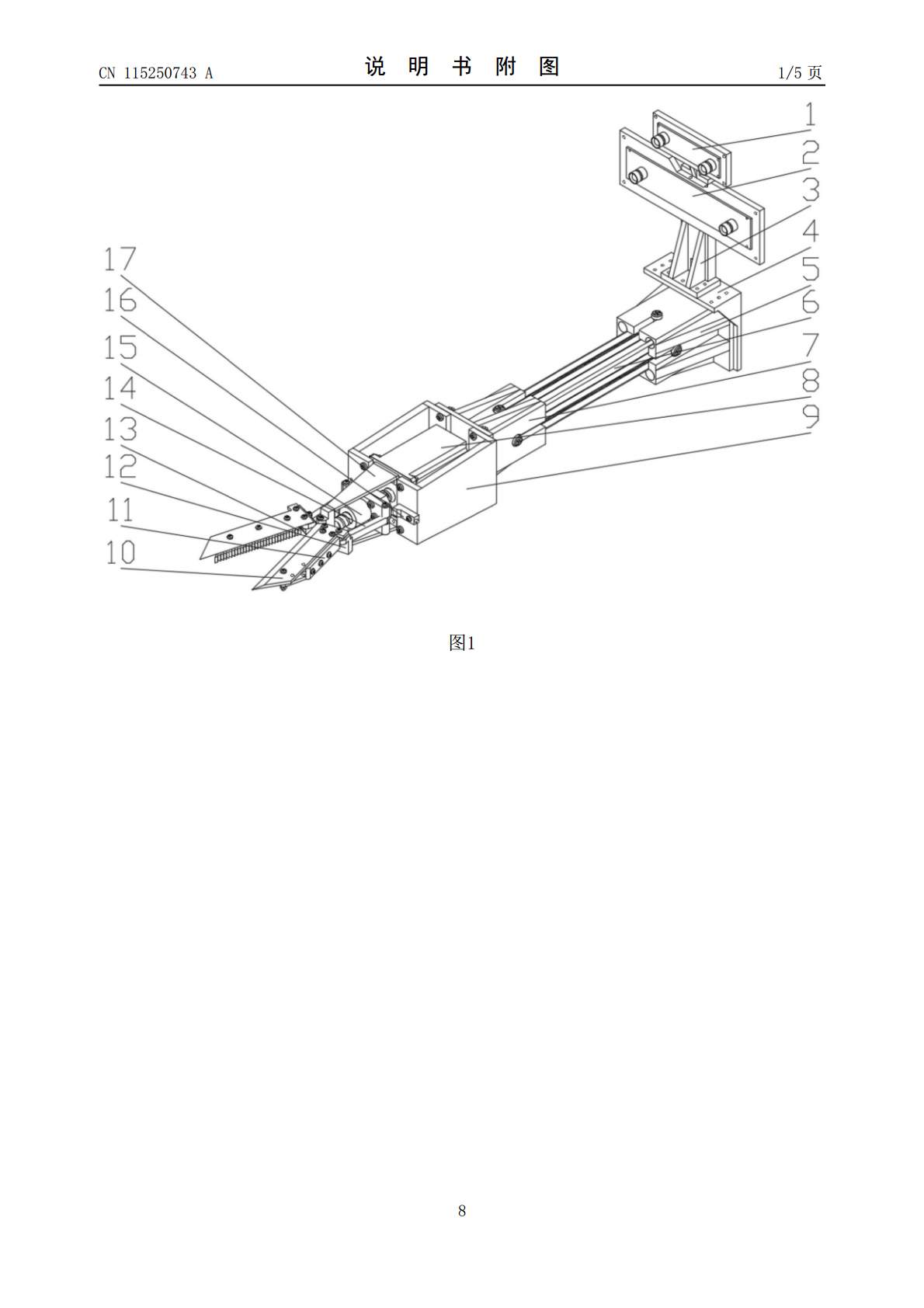
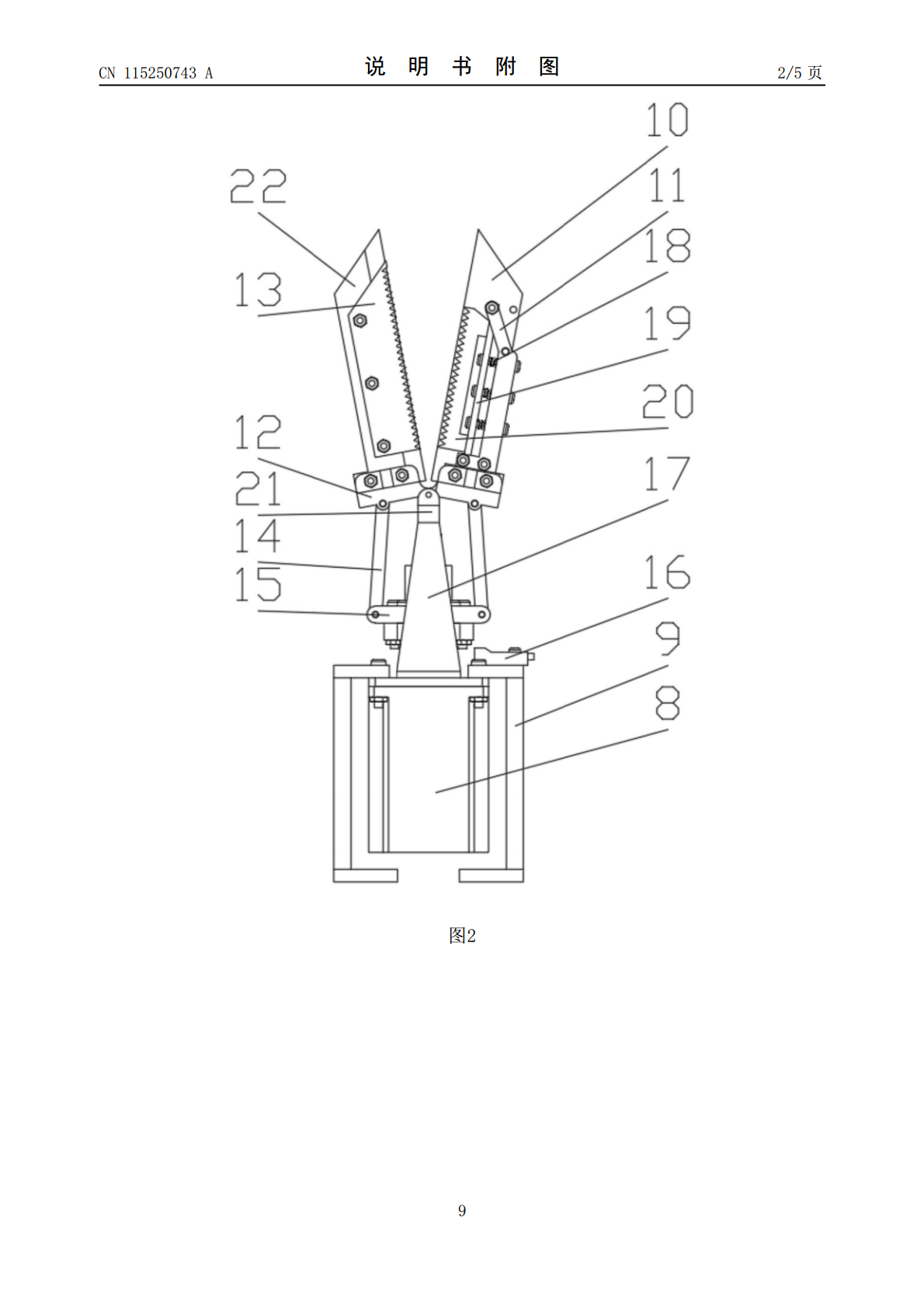
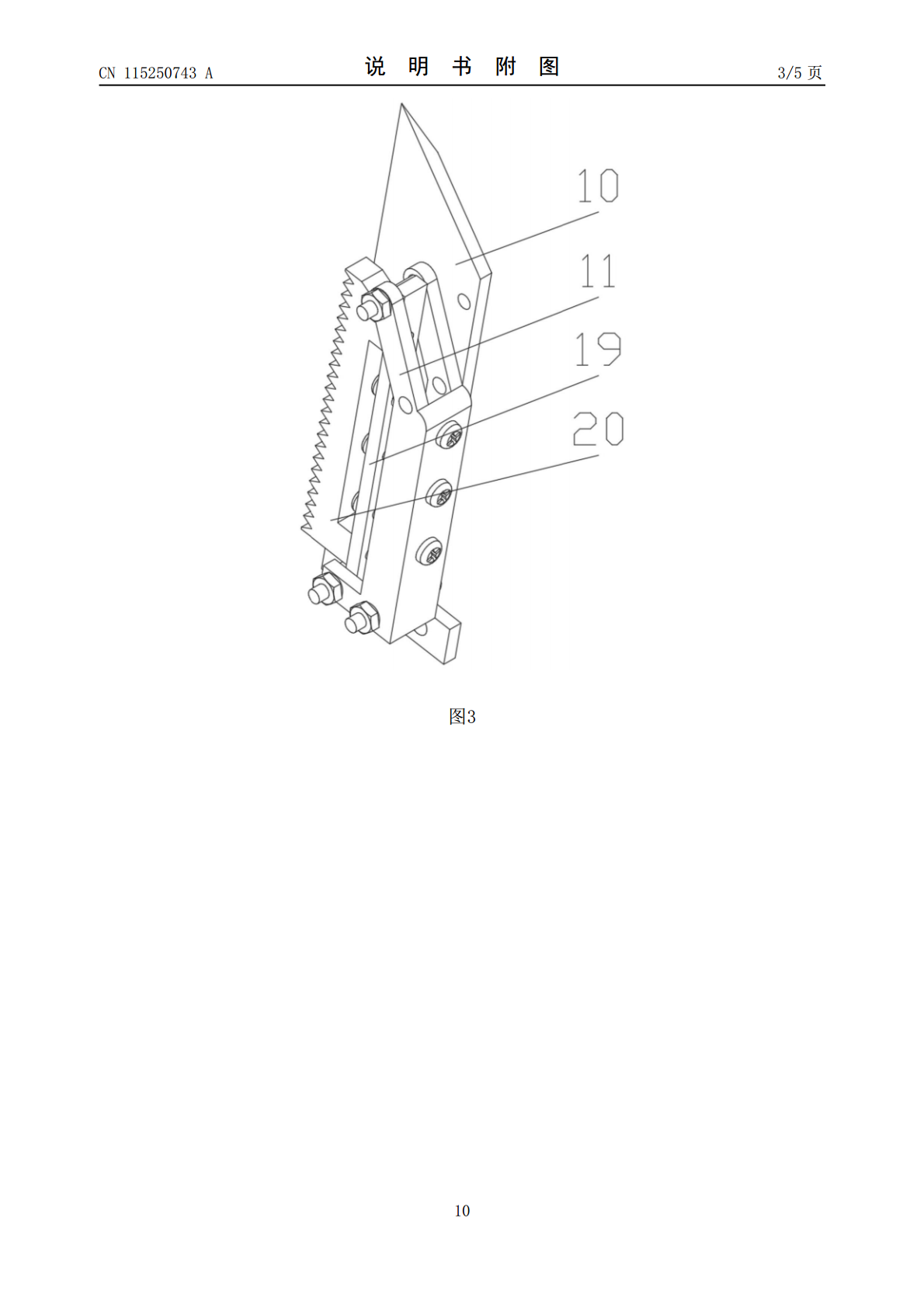
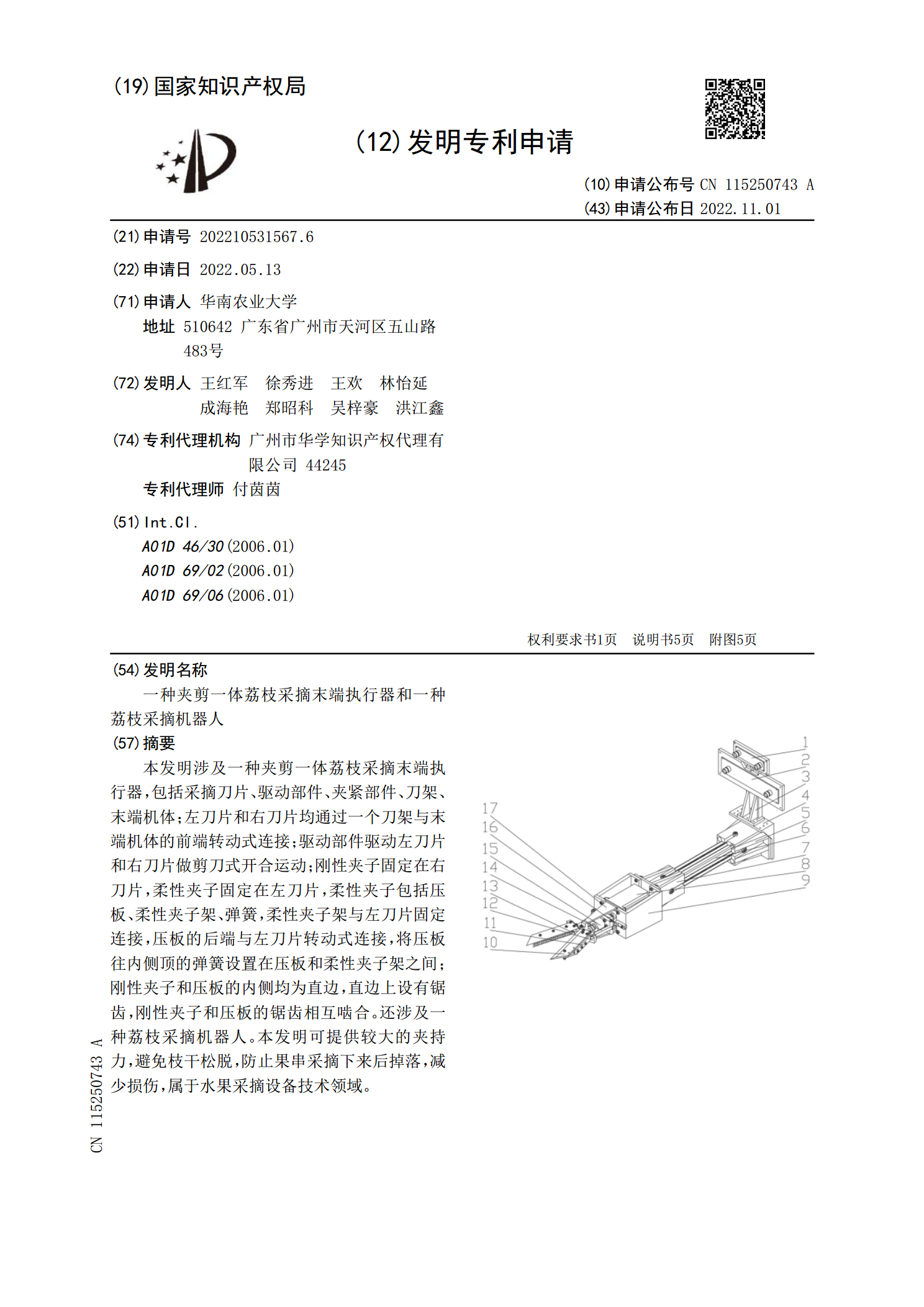
本发明涉及一种夹剪一体荔枝采摘末端执行器,包括采摘刀片、驱动部件、夹紧部件、刀架、末端机体;左刀片和右刀片均通过一个刀架与末端机体的前端转动式连接;驱动部件驱动左刀片和右刀片做剪刀式开合运动;刚性夹子固定在右刀片,柔性夹子固定在左刀片,柔性夹子包括压板、柔性夹子架、弹簧,柔性夹子架与左刀片固定连接,压板的后端与左刀片转动式连接,将压板往内侧顶的弹簧设置在压板和柔性夹子架之间;刚性夹子和压板的内侧均为直边,直边上设有锯齿,刚性夹子和压板的锯齿相互啮合。还涉及一种荔枝采摘机器人。本发明可提供较大的夹持力,避免
一种果梗夹剪式采摘机器人末端执行器.pdf
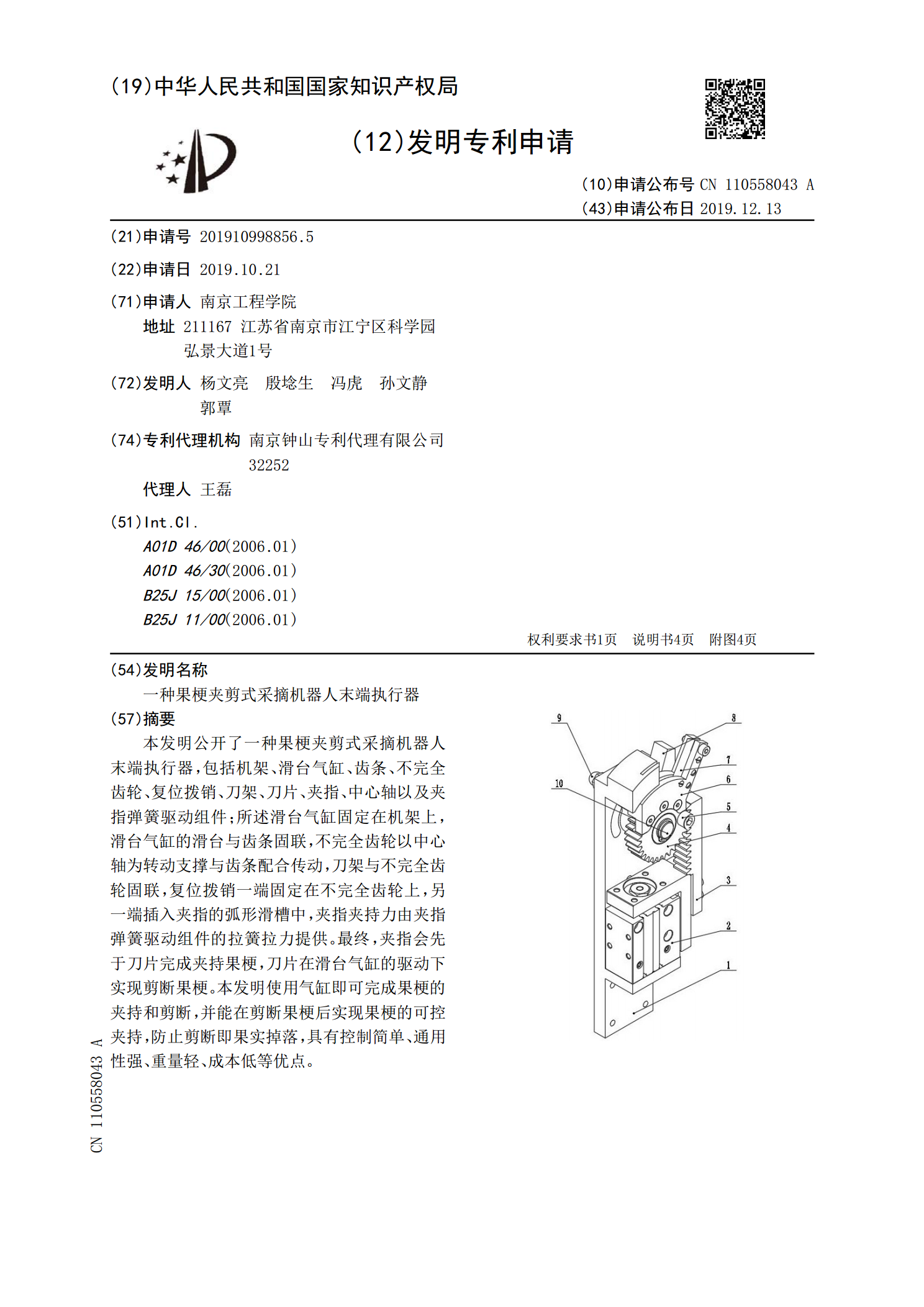
本发明公开了一种果梗夹剪式采摘机器人末端执行器,包括机架、滑台气缸、齿条、不完全齿轮、复位拨销、刀架、刀片、夹指、中心轴以及夹指弹簧驱动组件;所述滑台气缸固定在机架上,滑台气缸的滑台与齿条固联,不完全齿轮以中心轴为转动支撑与齿条配合传动,刀架与不完全齿轮固联,复位拨销一端固定在不完全齿轮上,另一端插入夹指的弧形滑槽中,夹指夹持力由夹指弹簧驱动组件的拉簧拉力提供。最终,夹指会先于刀片完成夹持果梗,刀片在滑台气缸的驱动下实现剪断果梗。本发明使用气缸即可完成果梗的夹持和剪断,并能在剪断果梗后实现果梗的可控夹持,
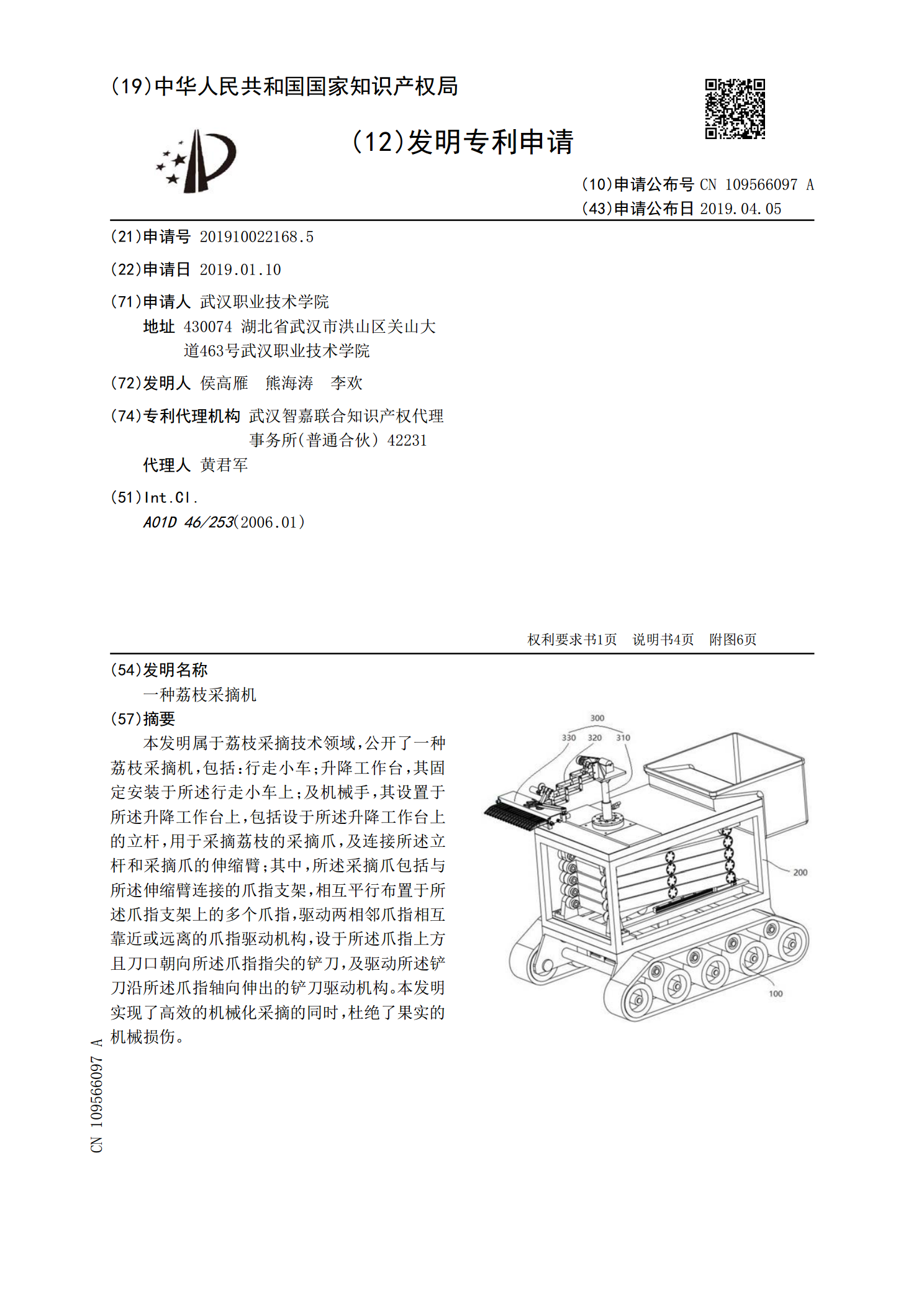
一种荔枝采摘机.pdf
本发明属于荔枝采摘技术领域,公开了一种荔枝采摘机,包括:行走小车;升降工作台,其固定安装于所述行走小车上;及机械手,其设置于所述升降工作台上,包括设于所述升降工作台上的立杆,用于采摘荔枝的采摘爪,及连接所述立杆和采摘爪的伸缩臂;其中,所述采摘爪包括与所述伸缩臂连接的爪指支架,相互平行布置于所述爪指支架上的多个爪指,驱动两相邻爪指相互靠近或远离的爪指驱动机构,设于所述爪指上方且刀口朝向所述爪指指尖的铲刀,及驱动所述铲刀沿所述爪指轴向伸出的铲刀驱动机构。本发明实现了高效的机械化采摘的同时,杜绝了果实的机械损伤
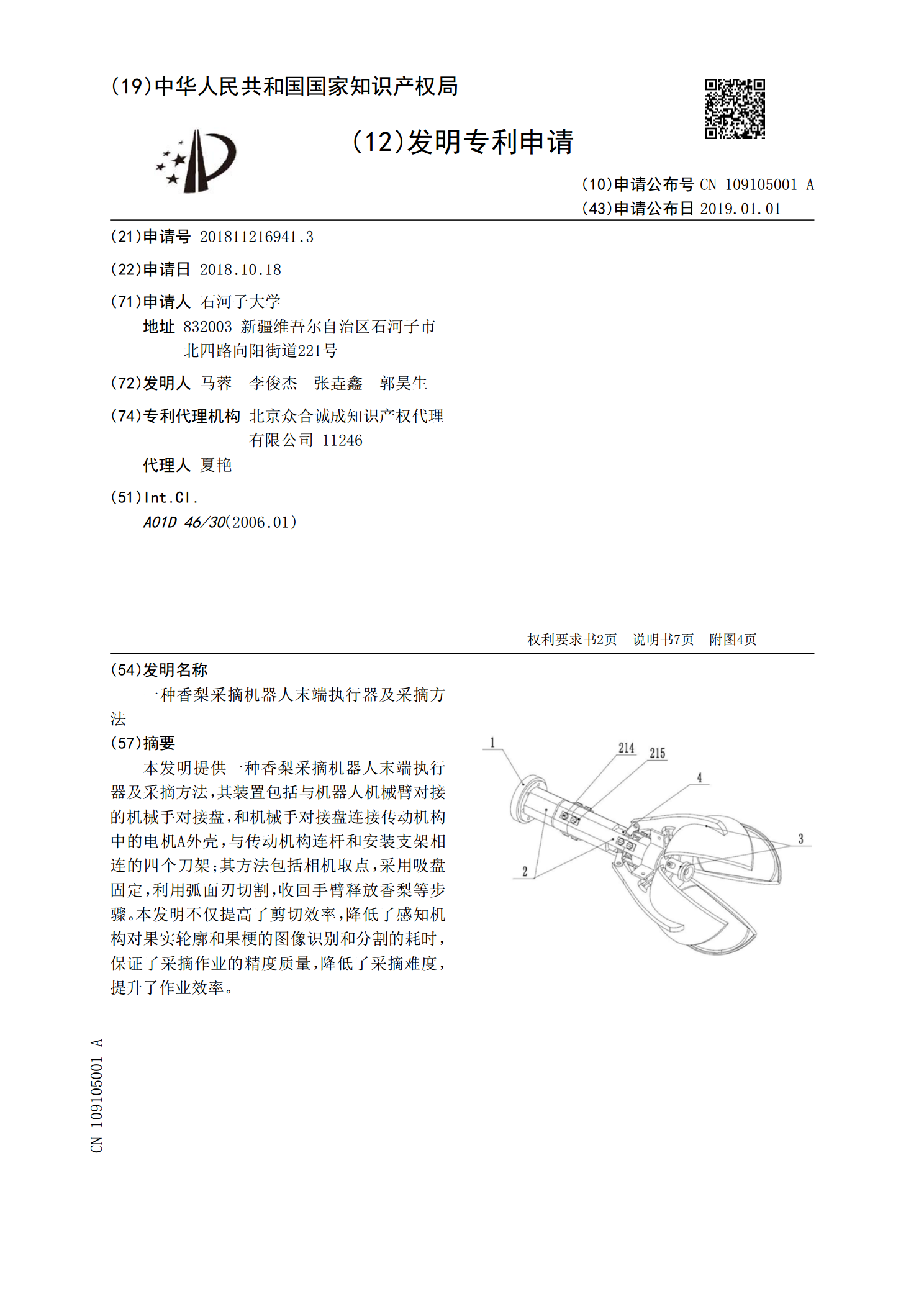
一种香梨采摘机器人末端执行器及采摘方法.pdf
本发明提供一种香梨采摘机器人末端执行器及采摘方法,其装置包括与机器人机械臂对接的机械手对接盘,和机械手对接盘连接传动机构中的电机A外壳,与传动机构连杆和安装支架相连的四个刀架;其方法包括相机取点,采用吸盘固定,利用弧面刃切割,收回手臂释放香梨等步骤。本发明不仅提高了剪切效率,降低了感知机构对果实轮廓和果梗的图像识别和分割的耗时,保证了采摘作业的精度质量,降低了采摘难度,提升了作业效率。
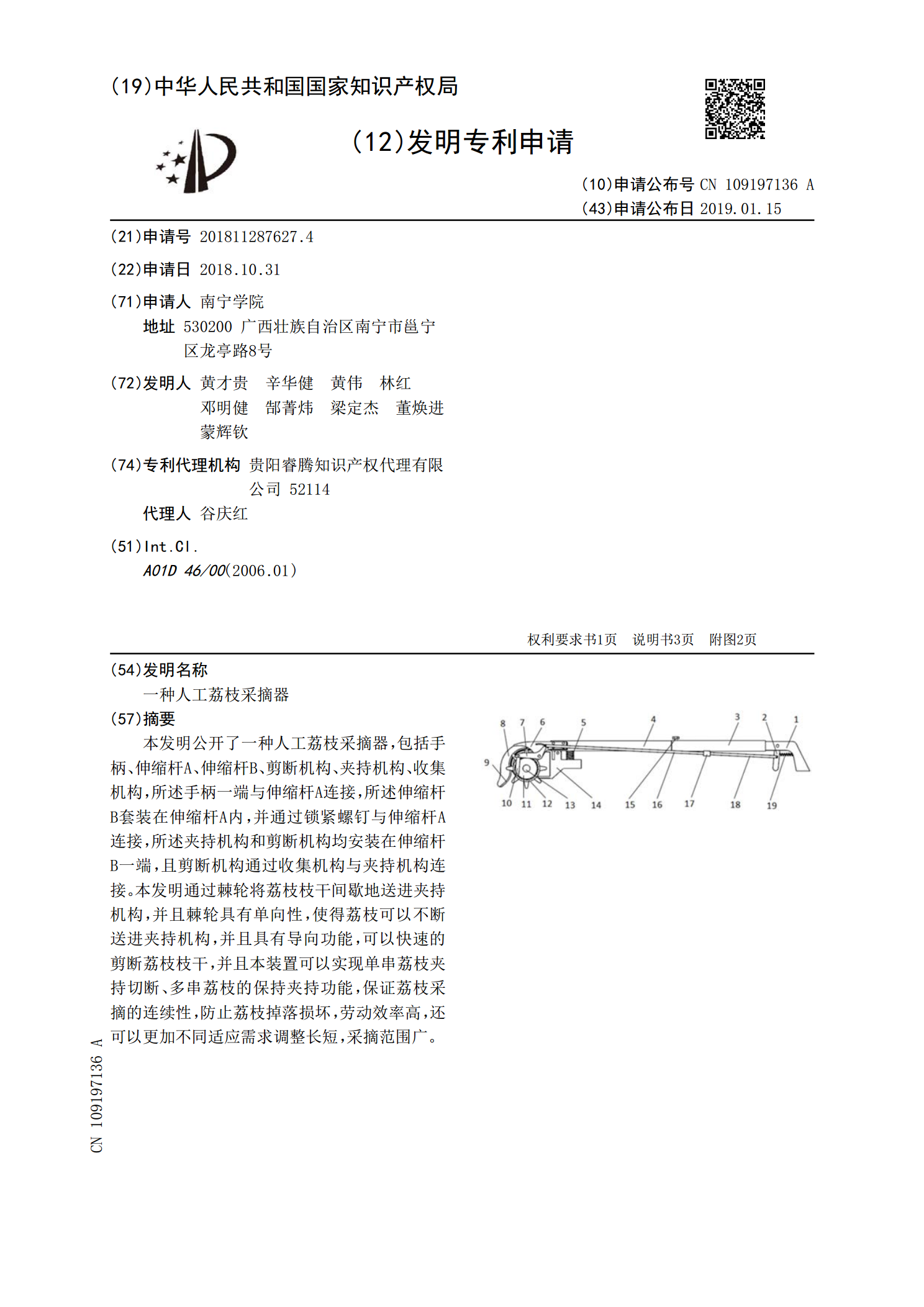
一种人工荔枝采摘器.pdf
本发明公开了一种人工荔枝采摘器,包括手柄、伸缩杆A、伸缩杆B、剪断机构、夹持机构、收集机构,所述手柄一端与伸缩杆A连接,所述伸缩杆B套装在伸缩杆A内,并通过锁紧螺钉与伸缩杆A连接,所述夹持机构和剪断机构均安装在伸缩杆B一端,且剪断机构通过收集机构与夹持机构连接。本发明通过棘轮将荔枝枝干间歇地送进夹持机构,并且棘轮具有单向性,使得荔枝可以不断送进夹持机构,并且具有导向功能,可以快速的剪断荔枝枝干,并且本装置可以实现单串荔枝夹持切断、多串荔枝的保持夹持功能,保证荔枝采摘的连续性,防止荔枝掉落损坏,劳动效率高,