
一种羊舍推草饲喂机器人.pdf

冬易****娘子


1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种羊舍推草饲喂机器人.pdf
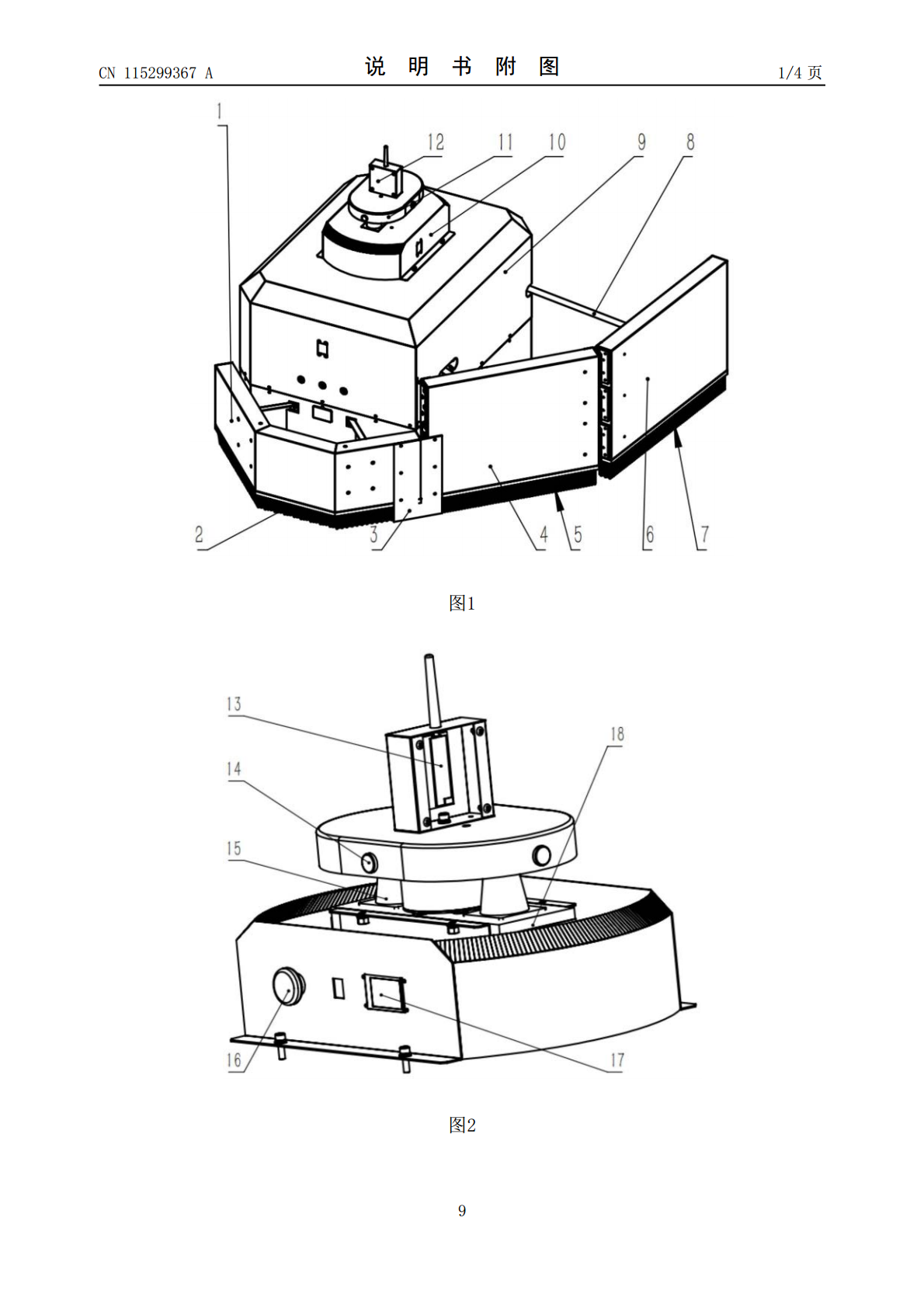
本发明提出了一种羊舍推草饲喂机器人,属于农业智能装置领域。解决了大规模养羊场中羊舍饲喂草料进食过程中部分草料散落、出区无法触食、人工清理成本高,耗时长等问题。本发明的固定推手组件与摆动推手组件和随动推手组件依次连接;固定推手组件的固定前推手底部安装有前推手下毛刷,摆动推手组件的摆动推手底部安装有摆动推手下毛刷,摆动推手驱动组件驱动摆动推手进行侧向清扫,随动摆手组件的随动推手下方安装有随动推手下毛刷,车体与随动推手间连接有限位杆机构。本发明利用固定在行走底盘上的电机驱动连杆,连杆推拉分段式侧推板,机器人行走
一种智能饲喂机器人的推料装置及推料方法.pdf
本发明涉及畜牧机械技术领域,公开了一种智能饲喂机器人的推料装置及推料方法,通过推料装置安装在智能饲喂机器人的前端和后端,智能饲喂机器人可双向推料;通过推料装置设有软质防尘罩及电动缸推动的连接机构,当推料开始时,在智能控制系统的控制下推料部件落下开始推料,当推料结束时,推料部件收起,无需单独占用存放空间,且有效避免了推料时尘土及草料进入推料设备内,做到精准起落;通过推料板设有八字型呈对称设置的侧推料板,有利于对出栏的草料推至两侧的围栏,通过侧推料板设有整形折板,使得草料被整齐摆放;通过推料板下折部处匹配安装

一种羊舍清扫推料车.pdf
本发明提供了一种羊舍清扫推料车,包括车身,所述车身底部的前侧固定连接有支架,所述支架包括两根对称设置的L型杆、与L型杆垂直连接的横杆,两根L型杆的端部通过摆动油缸连接有第一旋转电机,所述横杆的两端连接有第二旋转电机,所述第二旋转电机位于第一旋转电机后侧,所述第一旋转电机、所述第二旋转电机竖向设置且旋转轴上连接有清扫轮。本发明,可快速将散落在通道上的饲料扫进饲料槽,减少浪费。
一种智能饲喂机器人的饲喂方法.pdf
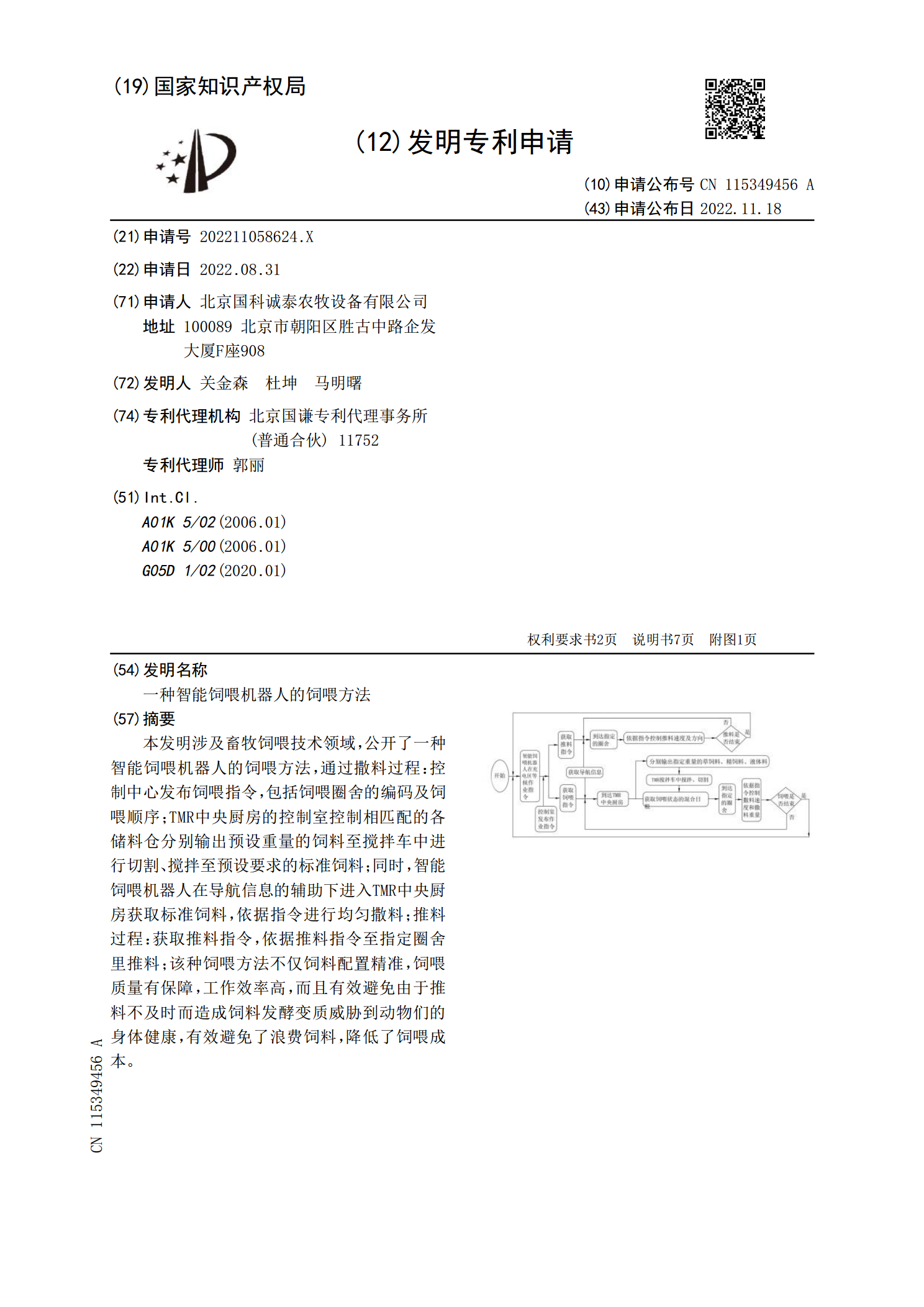
本发明涉及畜牧饲喂技术领域,公开了一种智能饲喂机器人的饲喂方法,通过撒料过程:控制中心发布饲喂指令,包括饲喂圈舍的编码及饲喂顺序;TMR中央厨房的控制室控制相匹配的各储料仓分别输出预设重量的饲料至搅拌车中进行切割、搅拌至预设要求的标准饲料;同时,智能饲喂机器人在导航信息的辅助下进入TMR中央厨房获取标准饲料,依据指令进行均匀撒料;推料过程:获取推料指令,依据推料指令至指定圈舍里推料;该种饲喂方法不仅饲料配置精准,饲喂质量有保障,工作效率高,而且有效避免由于推料不及时而造成饲料发酵变质威胁到动物们的身体健康
一种反刍类动物饲喂推料机器人及其使用方法.pdf
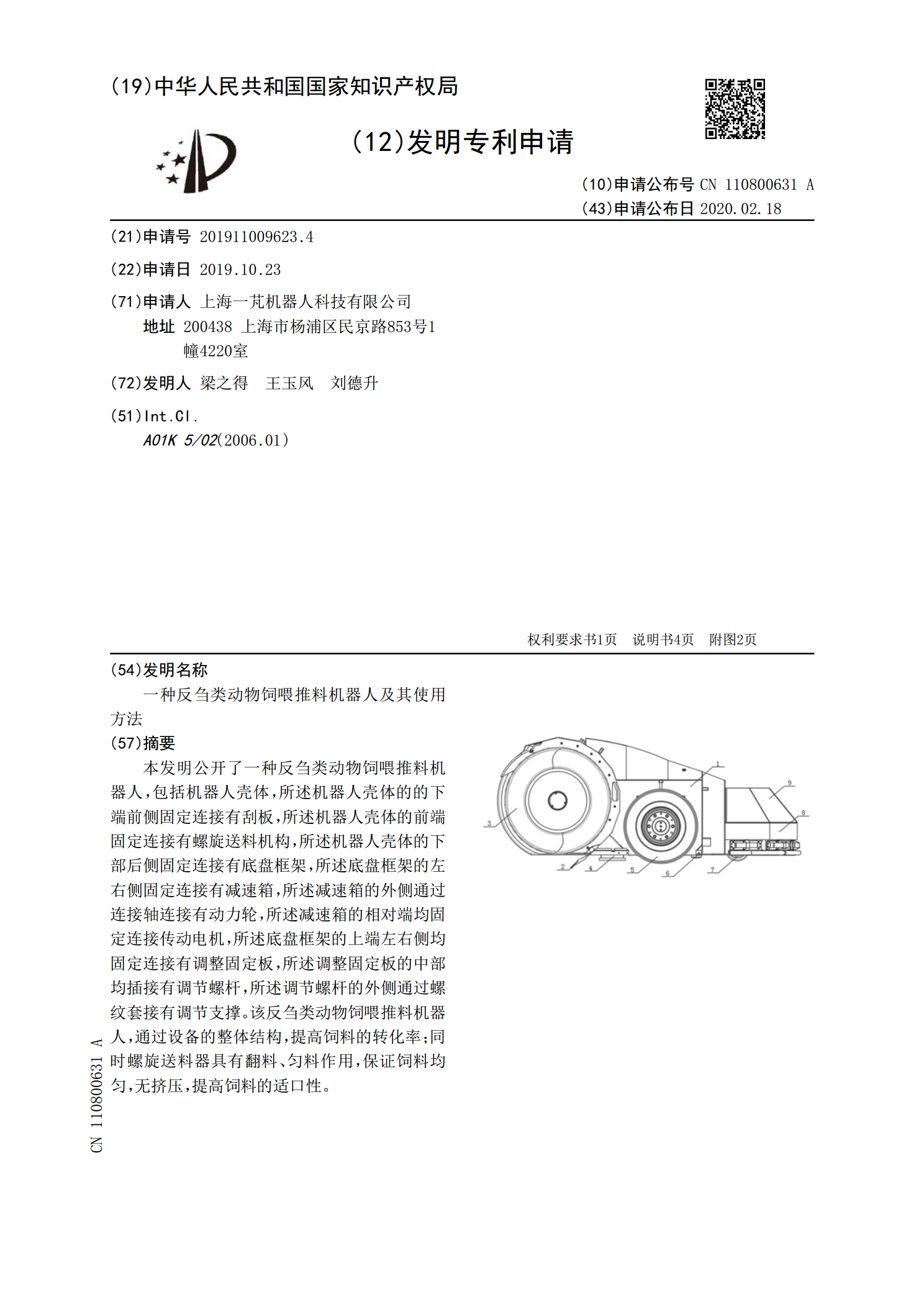
本发明公开了一种反刍类动物饲喂推料机器人,包括机器人壳体,所述机器人壳体的的下端前侧固定连接有刮板,所述机器人壳体的前端固定连接有螺旋送料机构,所述机器人壳体的下部后侧固定连接有底盘框架,所述底盘框架的左右侧固定连接有减速箱,所述减速箱的外侧通过连接轴连接有动力轮,所述减速箱的相对端均固定连接传动电机,所述底盘框架的上端左右侧均固定连接有调整固定板,所述调整固定板的中部均插接有调节螺杆,所述调节螺杆的外侧通过螺纹套接有调节支撑。该反刍类动物饲喂推料机器人,通过设备的整体结构,提高饲料的转化率;同时螺旋送料