
一种反刍类动物饲喂推料机器人及其使用方法.pdf

景山****魔王


1/8

2/8

3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种反刍类动物饲喂推料机器人及其使用方法.pdf
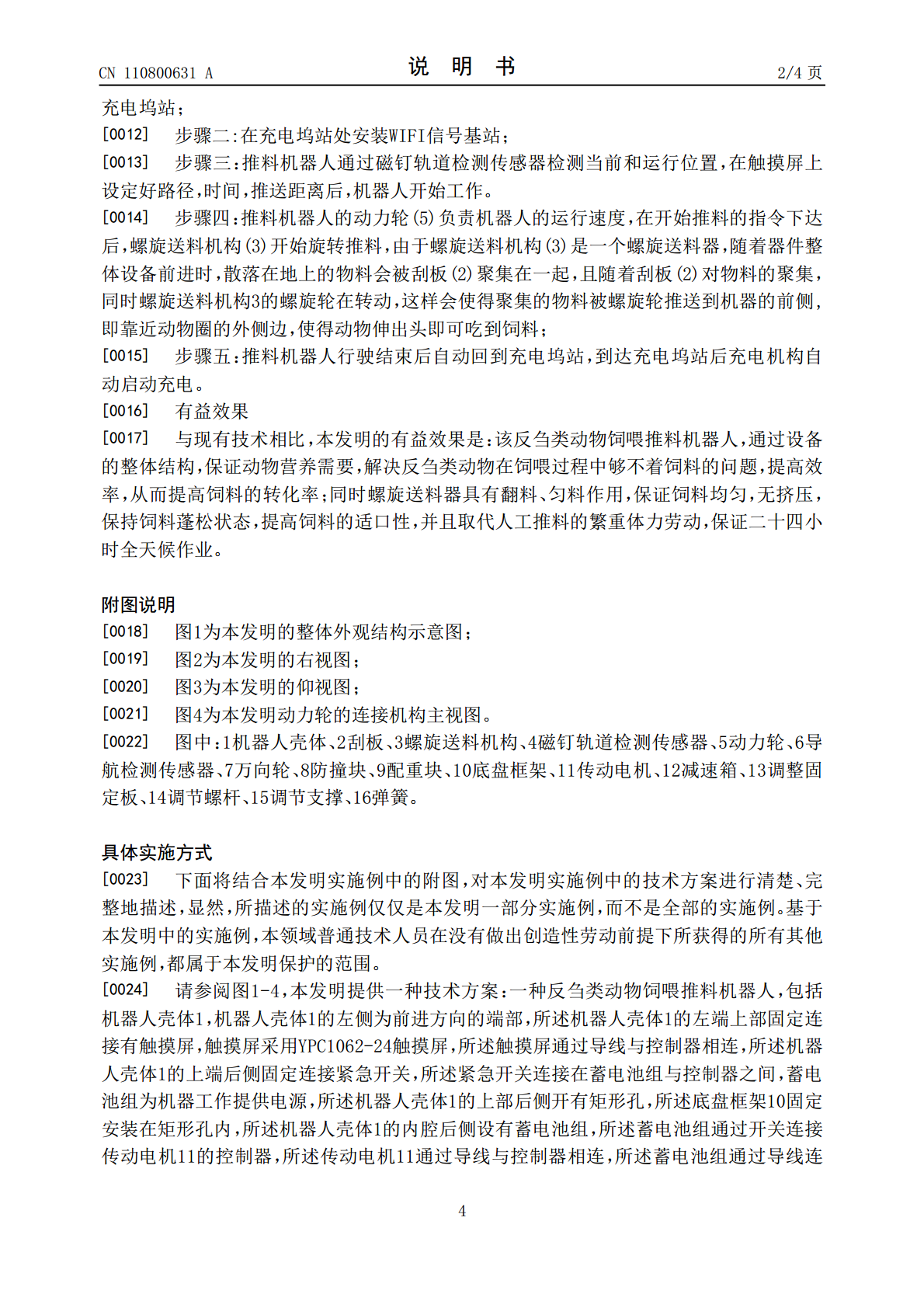
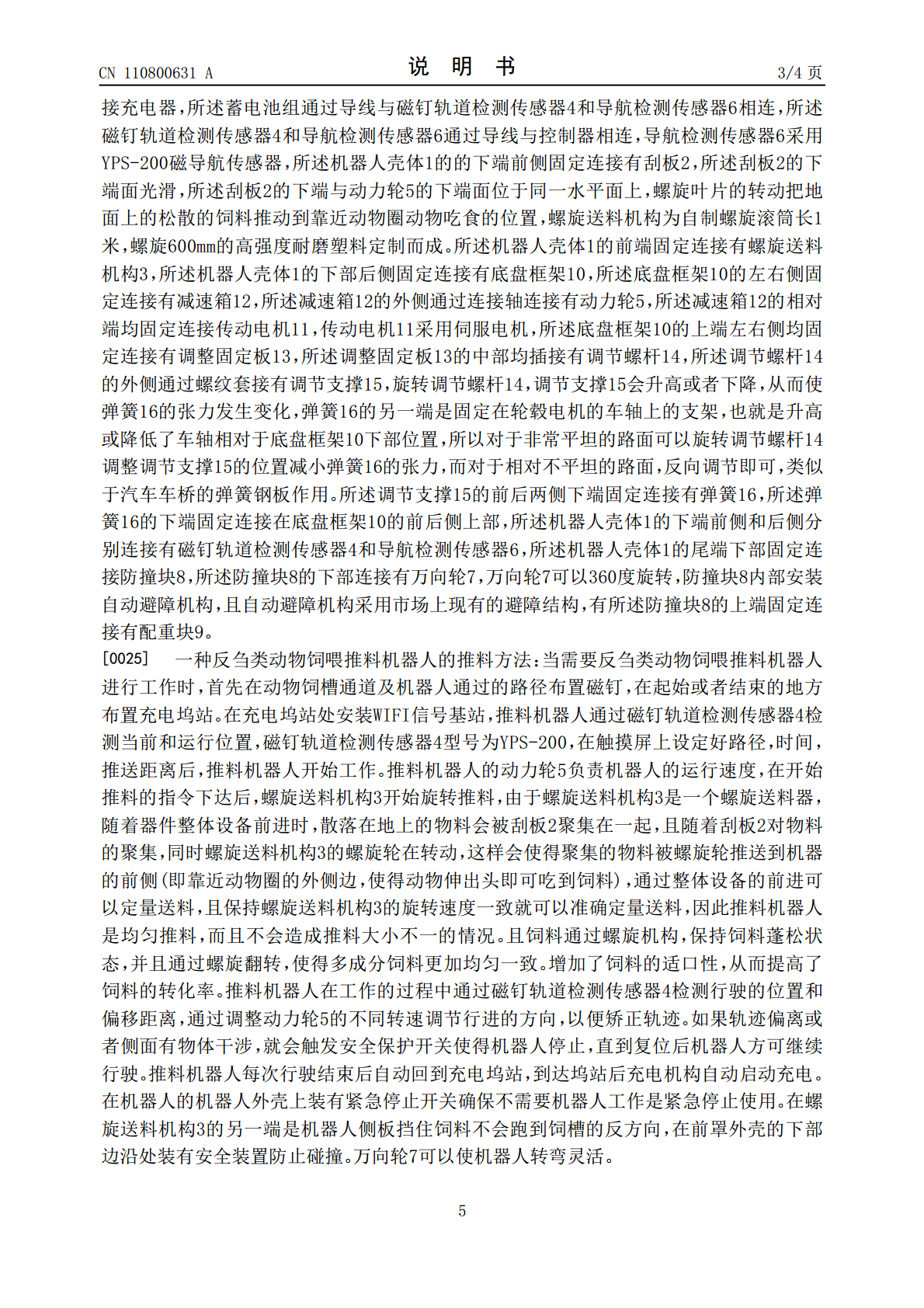
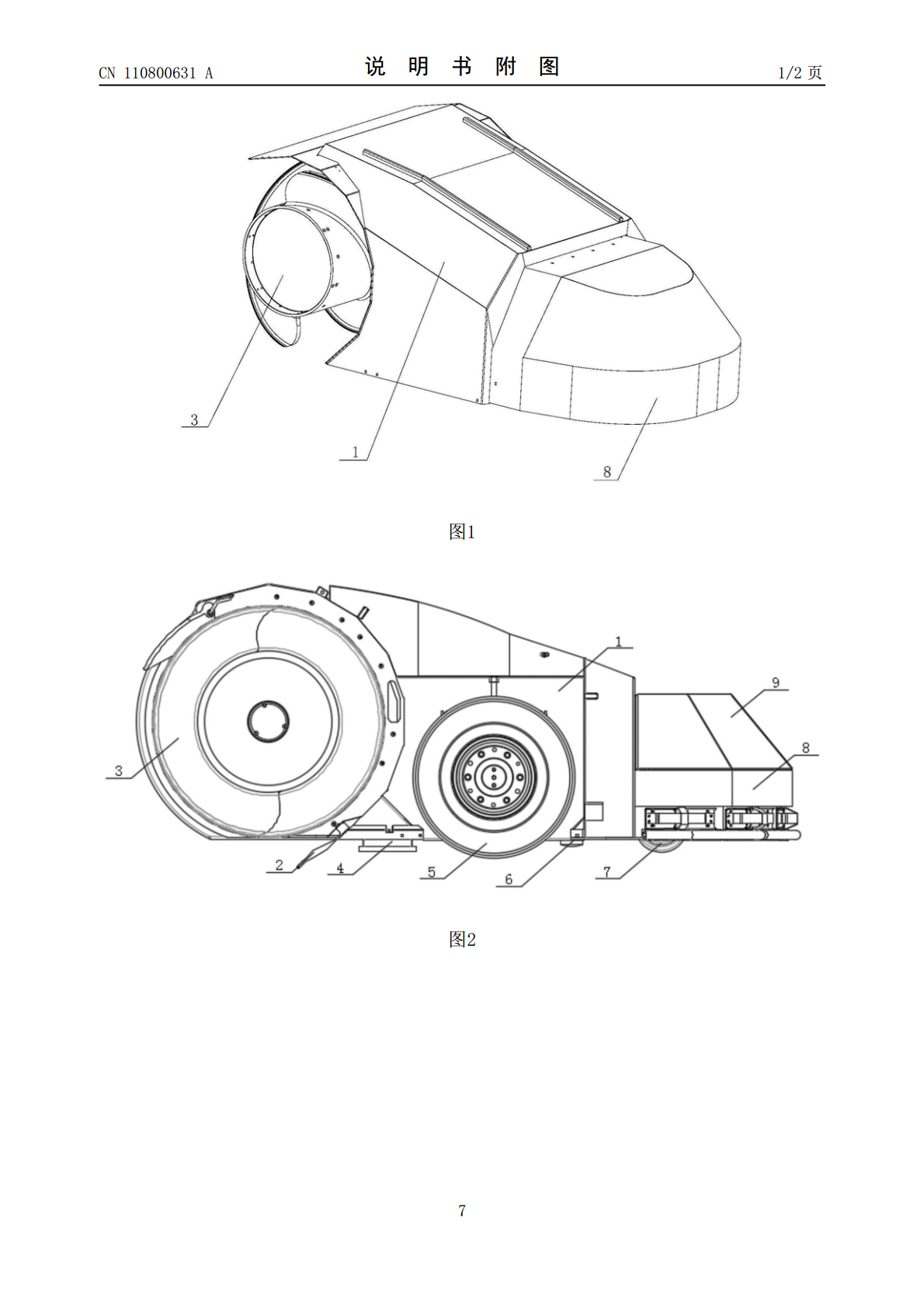
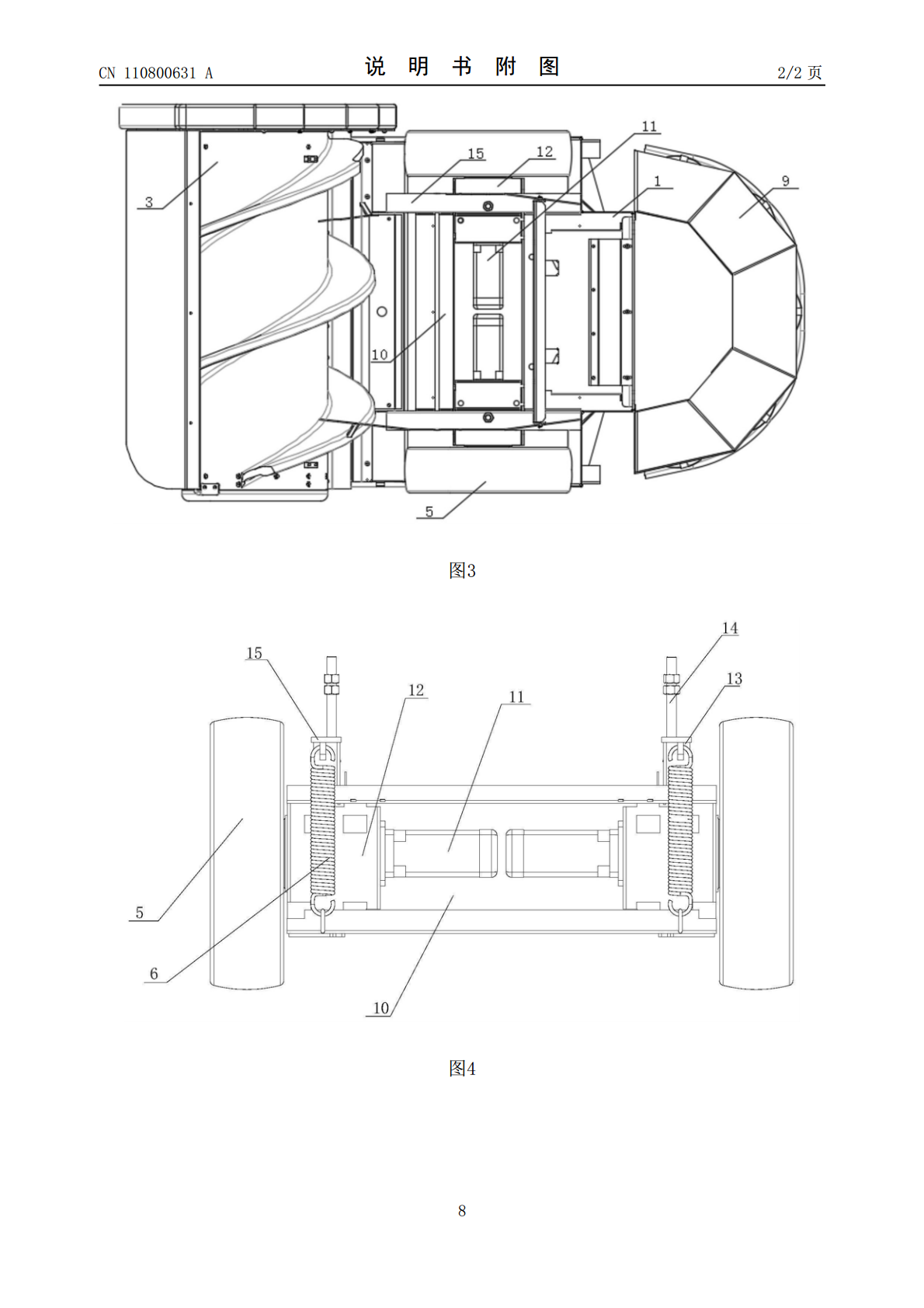
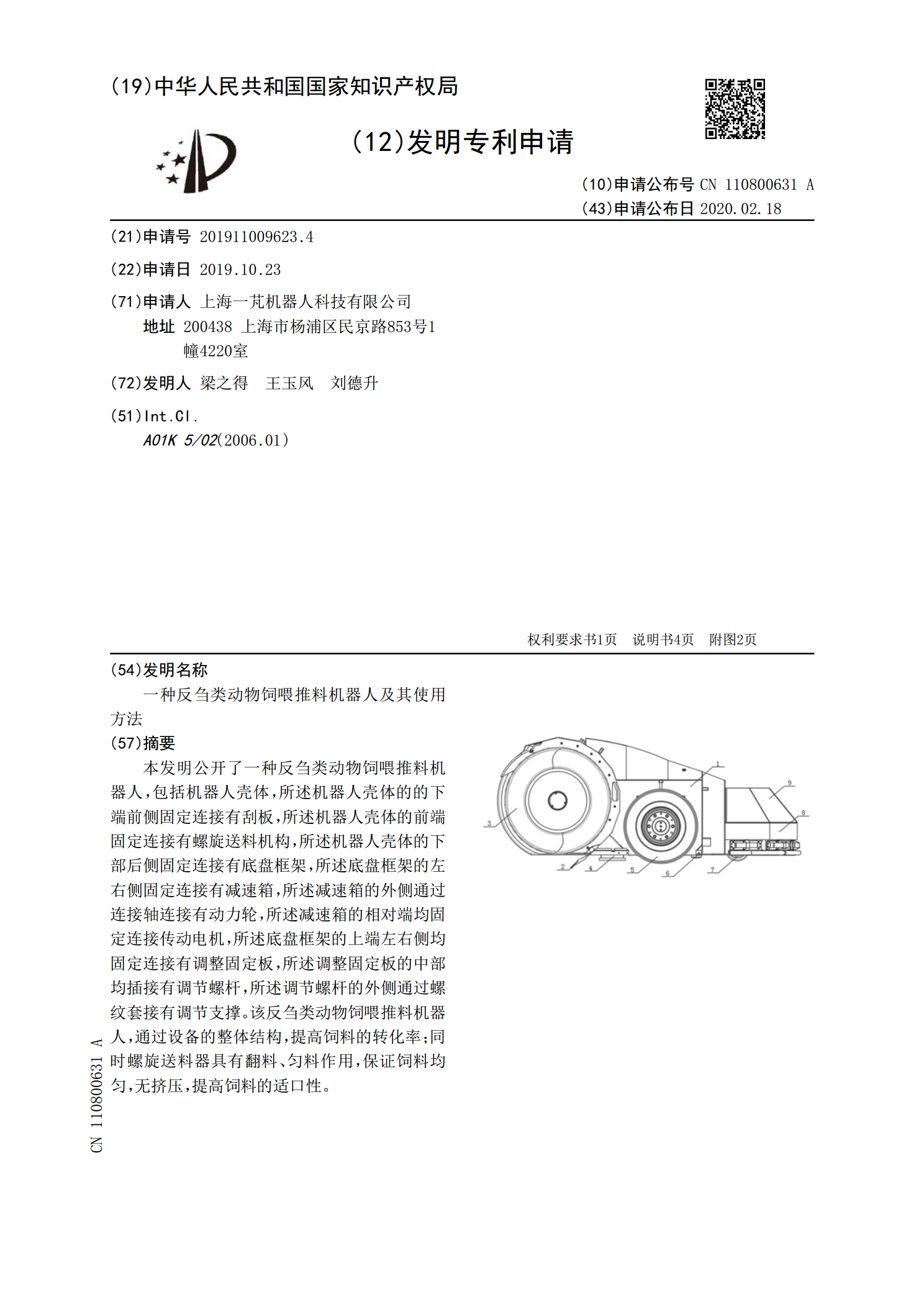
本发明公开了一种反刍类动物饲喂推料机器人,包括机器人壳体,所述机器人壳体的的下端前侧固定连接有刮板,所述机器人壳体的前端固定连接有螺旋送料机构,所述机器人壳体的下部后侧固定连接有底盘框架,所述底盘框架的左右侧固定连接有减速箱,所述减速箱的外侧通过连接轴连接有动力轮,所述减速箱的相对端均固定连接传动电机,所述底盘框架的上端左右侧均固定连接有调整固定板,所述调整固定板的中部均插接有调节螺杆,所述调节螺杆的外侧通过螺纹套接有调节支撑。该反刍类动物饲喂推料机器人,通过设备的整体结构,提高饲料的转化率;同时螺旋送料
一种智能饲喂机器人的推料装置及推料方法.pdf
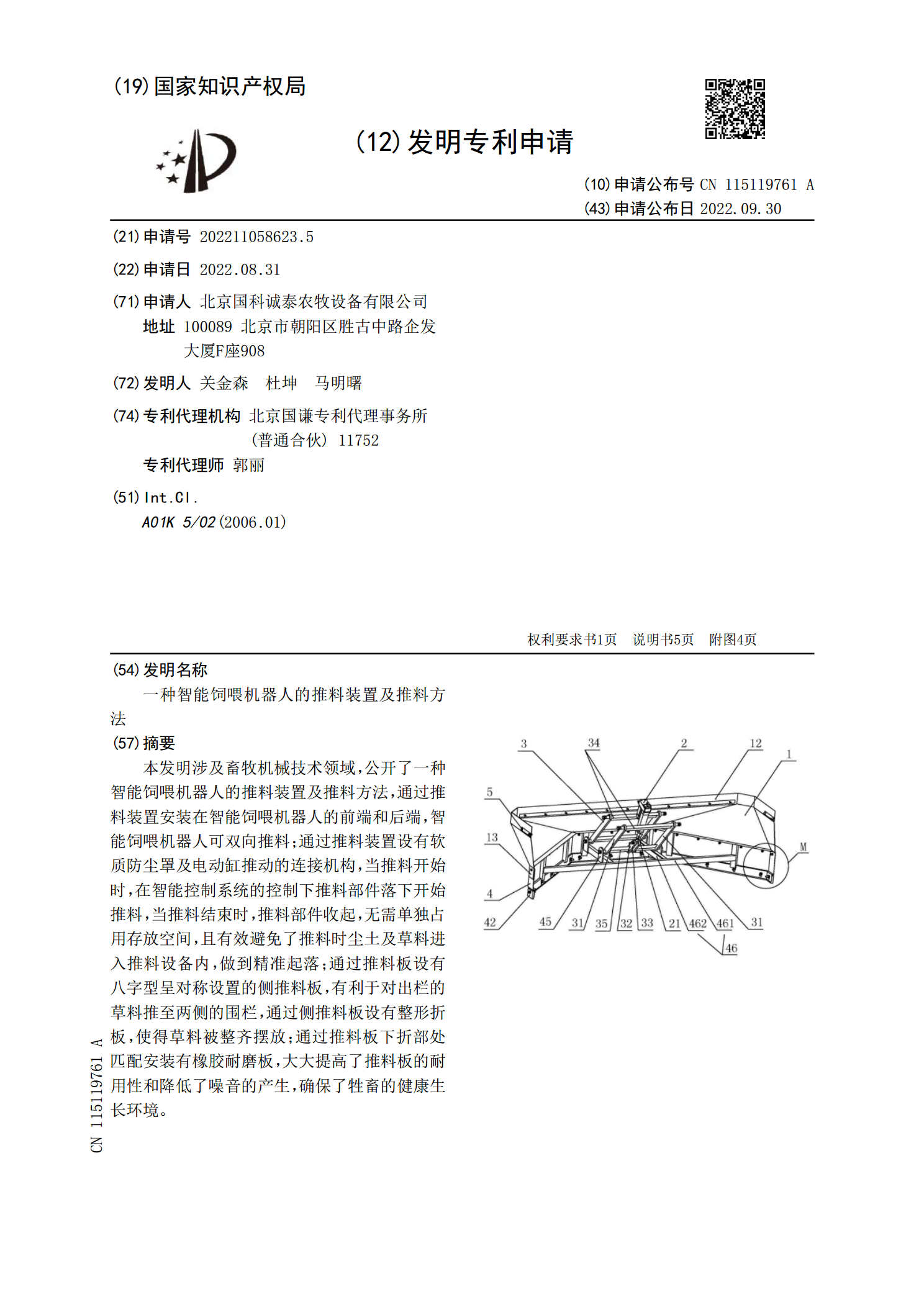
本发明涉及畜牧机械技术领域,公开了一种智能饲喂机器人的推料装置及推料方法,通过推料装置安装在智能饲喂机器人的前端和后端,智能饲喂机器人可双向推料;通过推料装置设有软质防尘罩及电动缸推动的连接机构,当推料开始时,在智能控制系统的控制下推料部件落下开始推料,当推料结束时,推料部件收起,无需单独占用存放空间,且有效避免了推料时尘土及草料进入推料设备内,做到精准起落;通过推料板设有八字型呈对称设置的侧推料板,有利于对出栏的草料推至两侧的围栏,通过侧推料板设有整形折板,使得草料被整齐摆放;通过推料板下折部处匹配安装
一种羊舍推草饲喂机器人.pdf
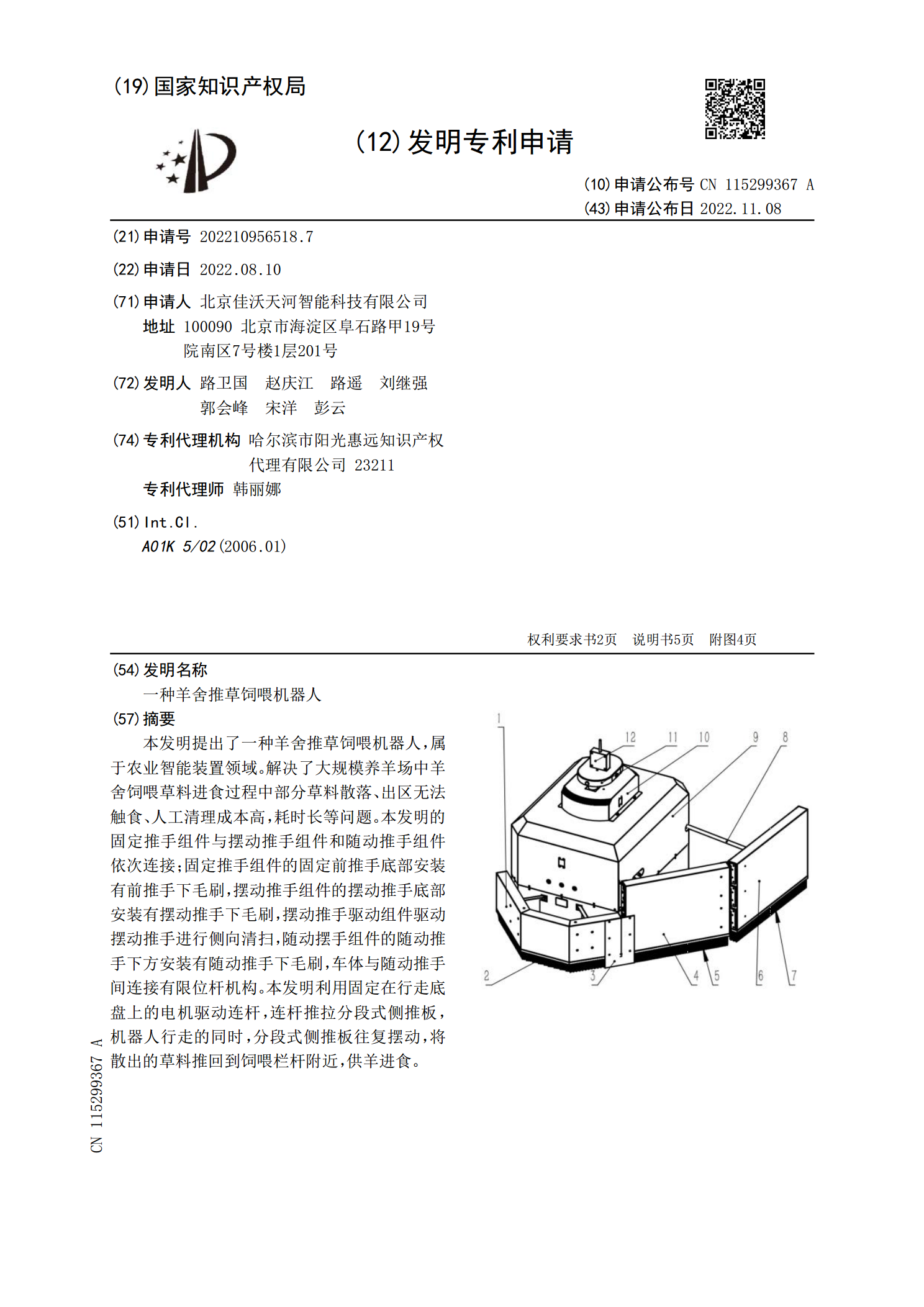
本发明提出了一种羊舍推草饲喂机器人,属于农业智能装置领域。解决了大规模养羊场中羊舍饲喂草料进食过程中部分草料散落、出区无法触食、人工清理成本高,耗时长等问题。本发明的固定推手组件与摆动推手组件和随动推手组件依次连接;固定推手组件的固定前推手底部安装有前推手下毛刷,摆动推手组件的摆动推手底部安装有摆动推手下毛刷,摆动推手驱动组件驱动摆动推手进行侧向清扫,随动摆手组件的随动推手下方安装有随动推手下毛刷,车体与随动推手间连接有限位杆机构。本发明利用固定在行走底盘上的电机驱动连杆,连杆推拉分段式侧推板,机器人行走
一种改善反刍动物肉质的复方中草药及其饲喂方法.pdf
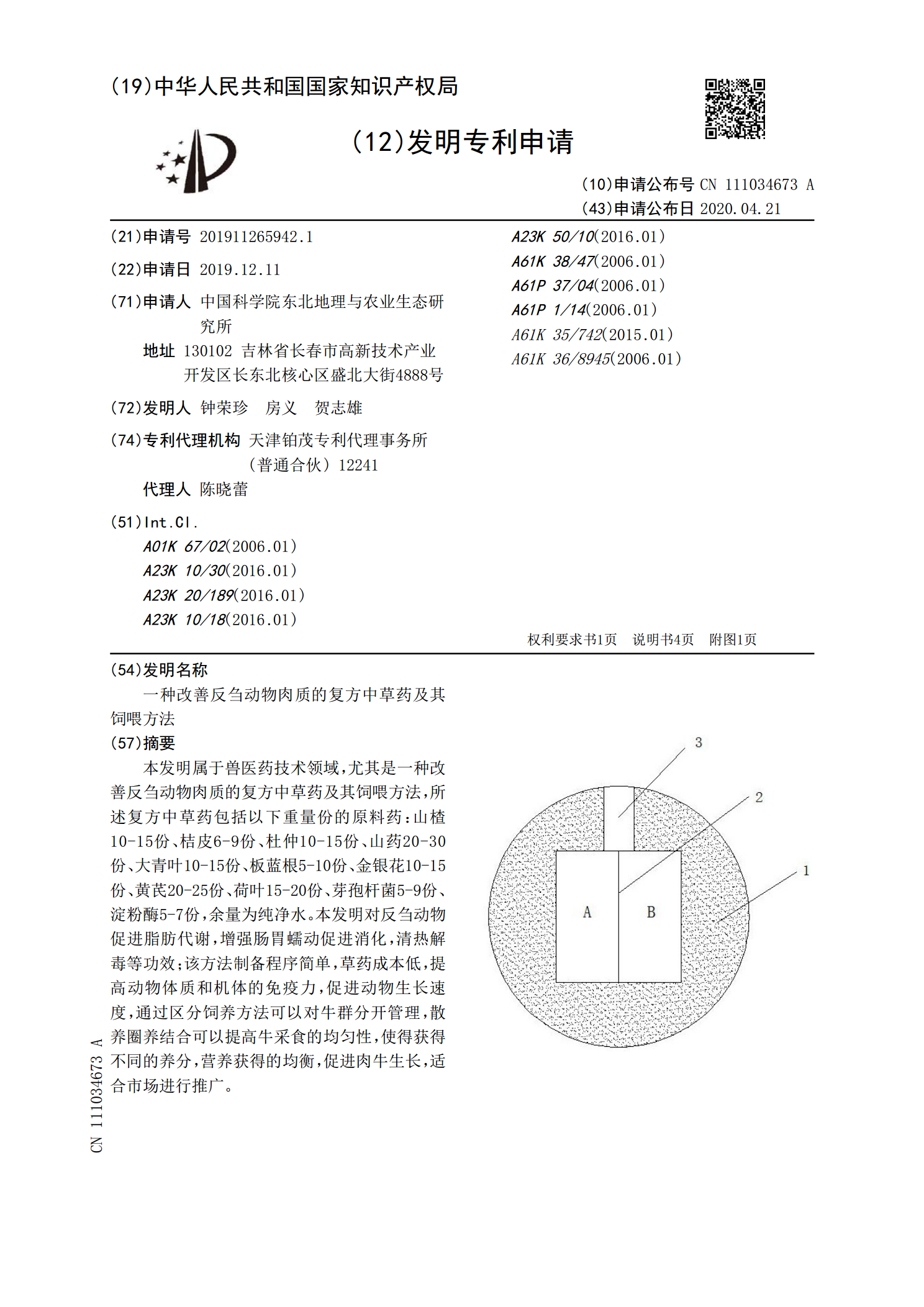
本发明属于兽医药技术领域,尤其是一种改善反刍动物肉质的复方中草药及其饲喂方法,所述复方中草药包括以下重量份的原料药:山楂10‑15份、桔皮6‑9份、杜仲10‑15份、山药20‑30份、大青叶10‑15份、板蓝根5‑10份、金银花10‑15份、黄芪20‑25份、荷叶15‑20份、芽孢杆菌5‑9份、淀粉酶5‑7份,余量为纯净水。本发明对反刍动物促进脂肪代谢,增强肠胃蠕动促进消化,清热解毒等功效;该方法制备程序简单,草药成本低,提高动物体质和机体的免疫力,促进动物生长速度,通过区分饲养方法可以对牛群分开管理,散
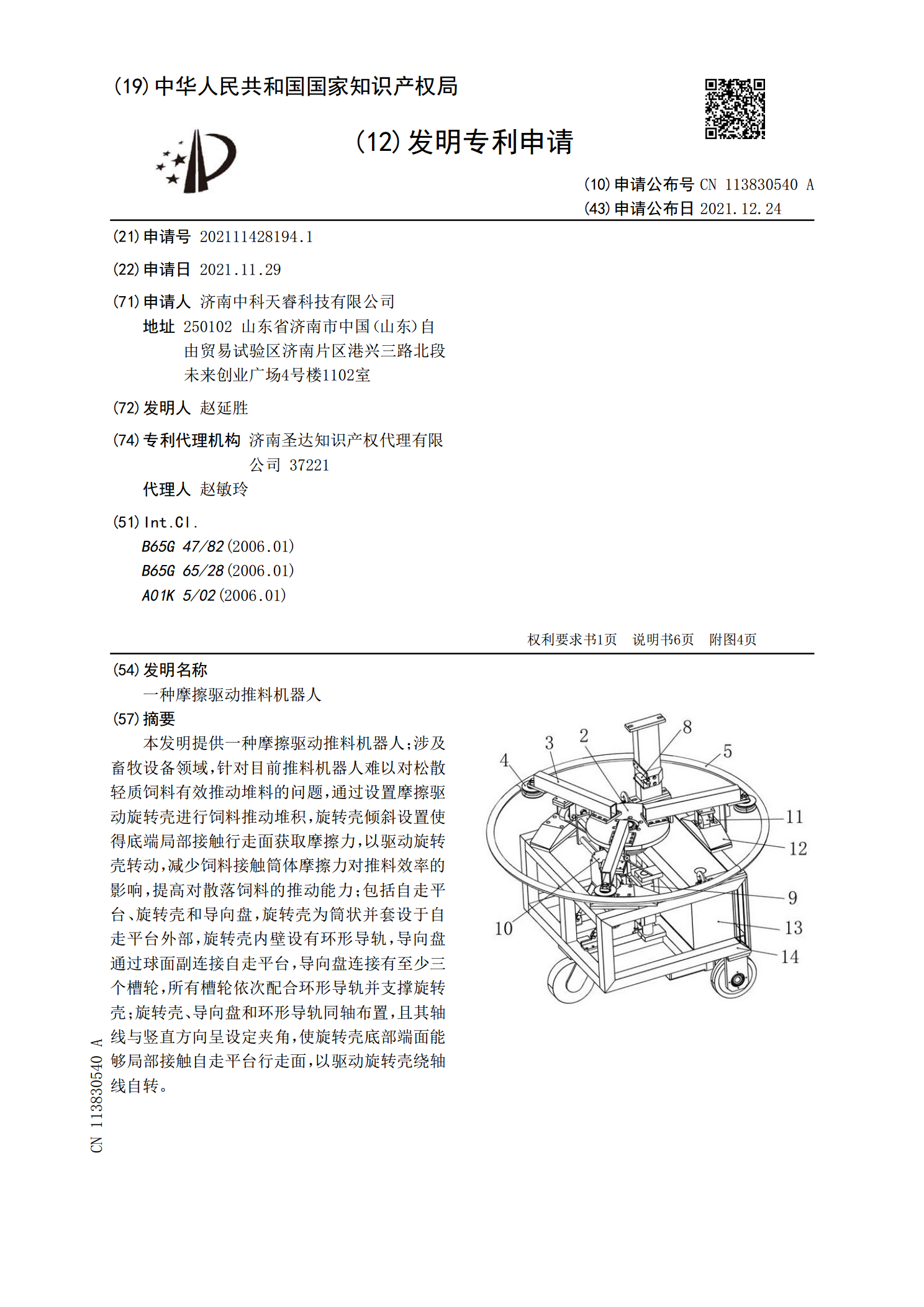
一种摩擦驱动推料机器人.pdf
本发明提供一种摩擦驱动推料机器人;涉及畜牧设备领域,针对目前推料机器人难以对松散轻质饲料有效推动堆料的问题,通过设置摩擦驱动旋转壳进行饲料推动堆积,旋转壳倾斜设置使得底端局部接触行走面获取摩擦力,以驱动旋转壳转动,减少饲料接触筒体摩擦力对推料效率的影响,提高对散落饲料的推动能力;包括自走平台、旋转壳和导向盘,旋转壳为筒状并套设于自走平台外部,旋转壳内壁设有环形导轨,导向盘通过球面副连接自走平台,导向盘连接有至少三个槽轮,所有槽轮依次配合环形导轨并支撑旋转壳;旋转壳、导向盘和环形导轨同轴布置,且其轴线与竖直