
一种智能饲喂机器人的饲喂方法.pdf

听容****55

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能饲喂机器人的饲喂方法.pdf
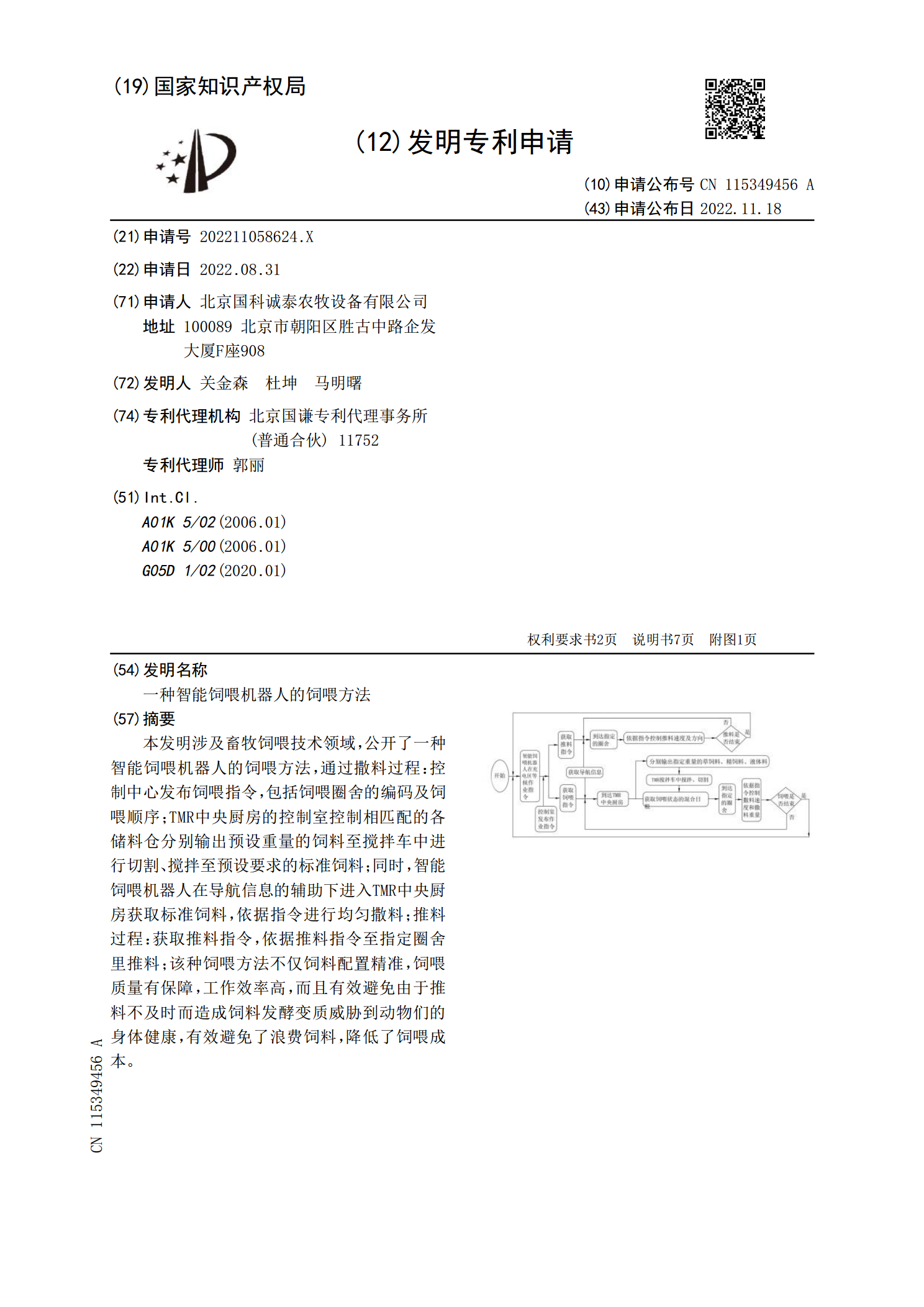
本发明涉及畜牧饲喂技术领域,公开了一种智能饲喂机器人的饲喂方法,通过撒料过程:控制中心发布饲喂指令,包括饲喂圈舍的编码及饲喂顺序;TMR中央厨房的控制室控制相匹配的各储料仓分别输出预设重量的饲料至搅拌车中进行切割、搅拌至预设要求的标准饲料;同时,智能饲喂机器人在导航信息的辅助下进入TMR中央厨房获取标准饲料,依据指令进行均匀撒料;推料过程:获取推料指令,依据推料指令至指定圈舍里推料;该种饲喂方法不仅饲料配置精准,饲喂质量有保障,工作效率高,而且有效避免由于推料不及时而造成饲料发酵变质威胁到动物们的身体健康

一种牧场用智能饲喂机器人及饲喂方法.pdf
本发明涉及畜牧行业智能饲喂技术领域,公开了一种牧场用智能饲喂机器人与饲喂方法,智能饲喂机器人包括底盘系统及安装于底盘上面的料箱装置,底盘的前、后两端均装有推料装置,底盘的边缘装有激光测距系统;料箱装置包括上端开口的箱体及安装于箱体底部的饲料加工装置、安装于箱体前壁上的出料门;箱体的前部设有与出料门相连的撒料皮带机,箱体的后部安装有智能控制系统,智能控制系统上部安装有激光导航系统;推料装置、激光导航系统及激光测距系统均由智能控制系统控制连接;智能饲喂机器人依据控制中心发布饲喂指令实现备料过程、撒料过程、推料
一种智能幼猪饲喂器及其饲喂方法.pdf
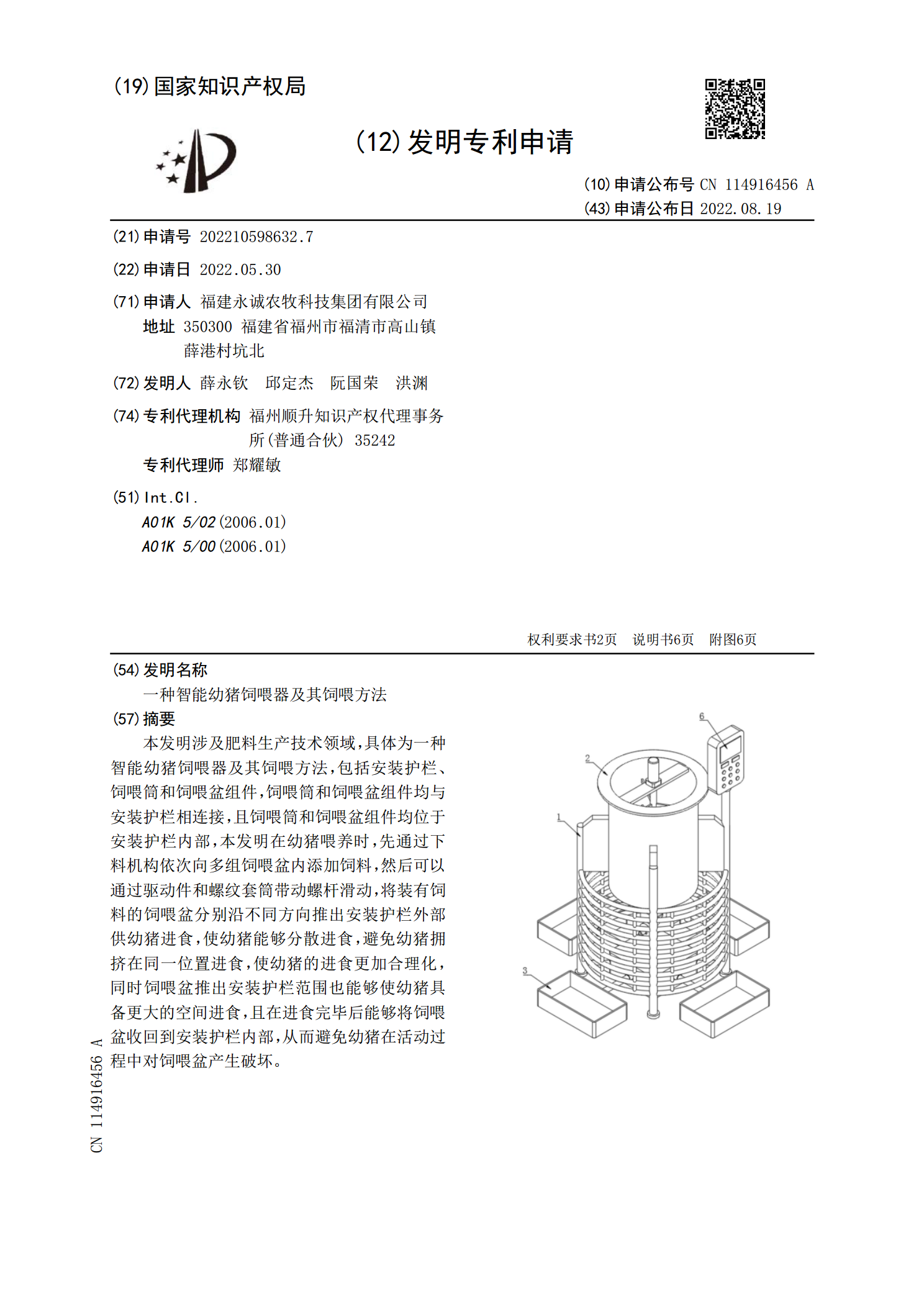
本发明涉及肥料生产技术领域,具体为一种智能幼猪饲喂器及其饲喂方法,包括安装护栏、饲喂筒和饲喂盆组件,饲喂筒和饲喂盆组件均与安装护栏相连接,且饲喂筒和饲喂盆组件均位于安装护栏内部,本发明在幼猪喂养时,先通过下料机构依次向多组饲喂盆内添加饲料,然后可以通过驱动件和螺纹套筒带动螺杆滑动,将装有饲料的饲喂盆分别沿不同方向推出安装护栏外部供幼猪进食,使幼猪能够分散进食,避免幼猪拥挤在同一位置进食,使幼猪的进食更加合理化,同时饲喂盆推出安装护栏范围也能够使幼猪具备更大的空间进食,且在进食完毕后能够将饲喂盆收回到安装护
一种智能饲喂机器人的推料装置及推料方法.pdf
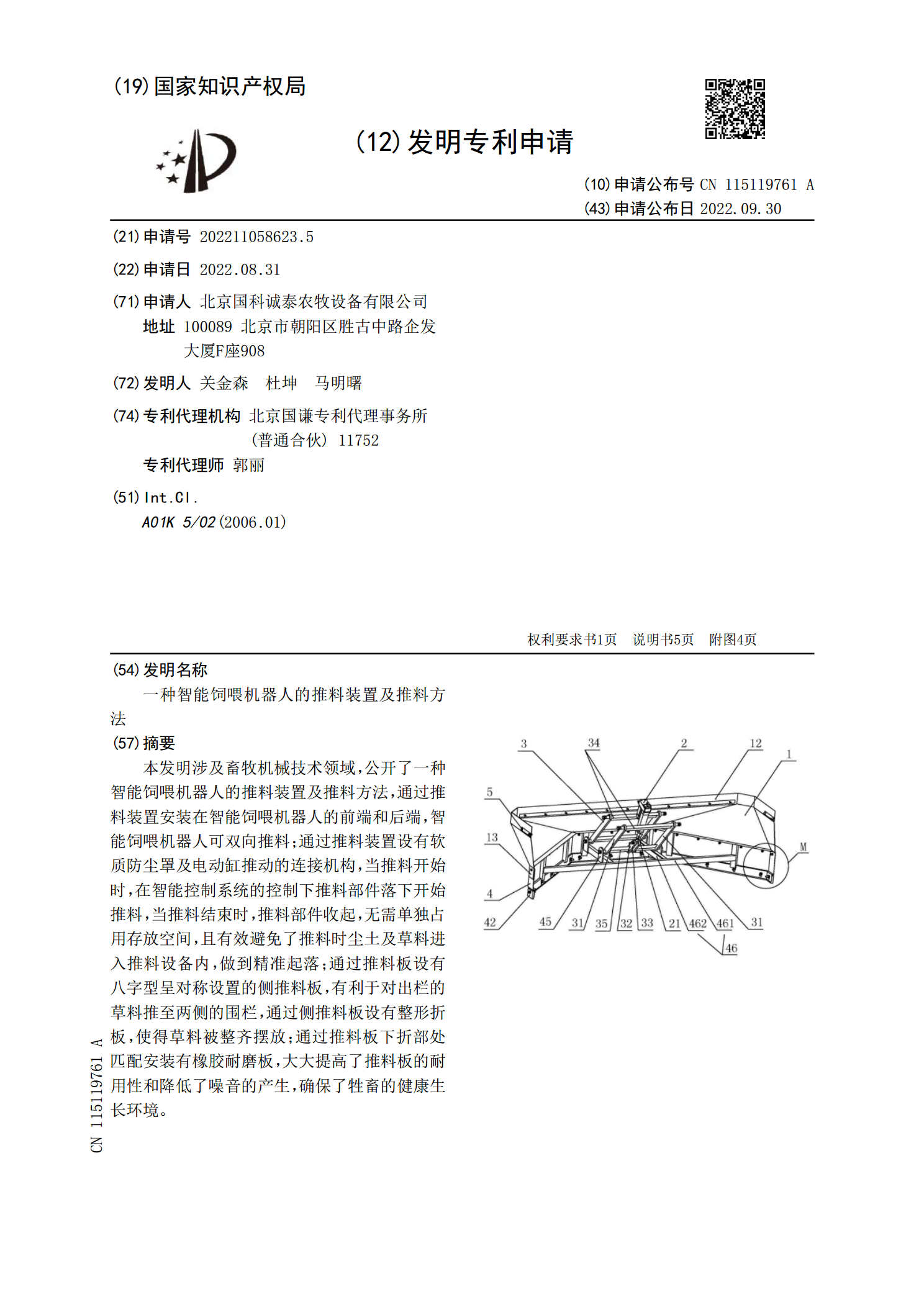
本发明涉及畜牧机械技术领域,公开了一种智能饲喂机器人的推料装置及推料方法,通过推料装置安装在智能饲喂机器人的前端和后端,智能饲喂机器人可双向推料;通过推料装置设有软质防尘罩及电动缸推动的连接机构,当推料开始时,在智能控制系统的控制下推料部件落下开始推料,当推料结束时,推料部件收起,无需单独占用存放空间,且有效避免了推料时尘土及草料进入推料设备内,做到精准起落;通过推料板设有八字型呈对称设置的侧推料板,有利于对出栏的草料推至两侧的围栏,通过侧推料板设有整形折板,使得草料被整齐摆放;通过推料板下折部处匹配安装

一种家禽饲喂的饲喂方法及其应用.pdf
本发明公开了一种家禽饲喂的饲喂方法。它是将浓缩矿物滴CMD原液用水稀释10倍,反复搅拌摇匀备用;将浓缩矿物滴CMD稀释液按照1:450倍比例进行二次稀释后加入饮水器(或水罐),反复搅拌摇匀后,方可供家禽饮用;家禽连续饮用浓缩矿物滴CMD饮水剂30天,可停用15天,而后可继续使用。实验结果显示在饮水中按照1:4500倍比例添加CMD浓缩矿物滴,胆固醇极显著降低,钙含量极显著提高,且随着时间分别呈降低和升高的趋势。综合分析,饮水中按照1:4500倍比例添加CMD浓缩矿物滴可明显提高鸡蛋的矿物元素,降低鸡蛋胆固