
异面部件接头交点孔精加工的位姿调整系统及调整方法.pdf

论文****轩吖


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

异面部件接头交点孔精加工的位姿调整系统及调整方法.pdf
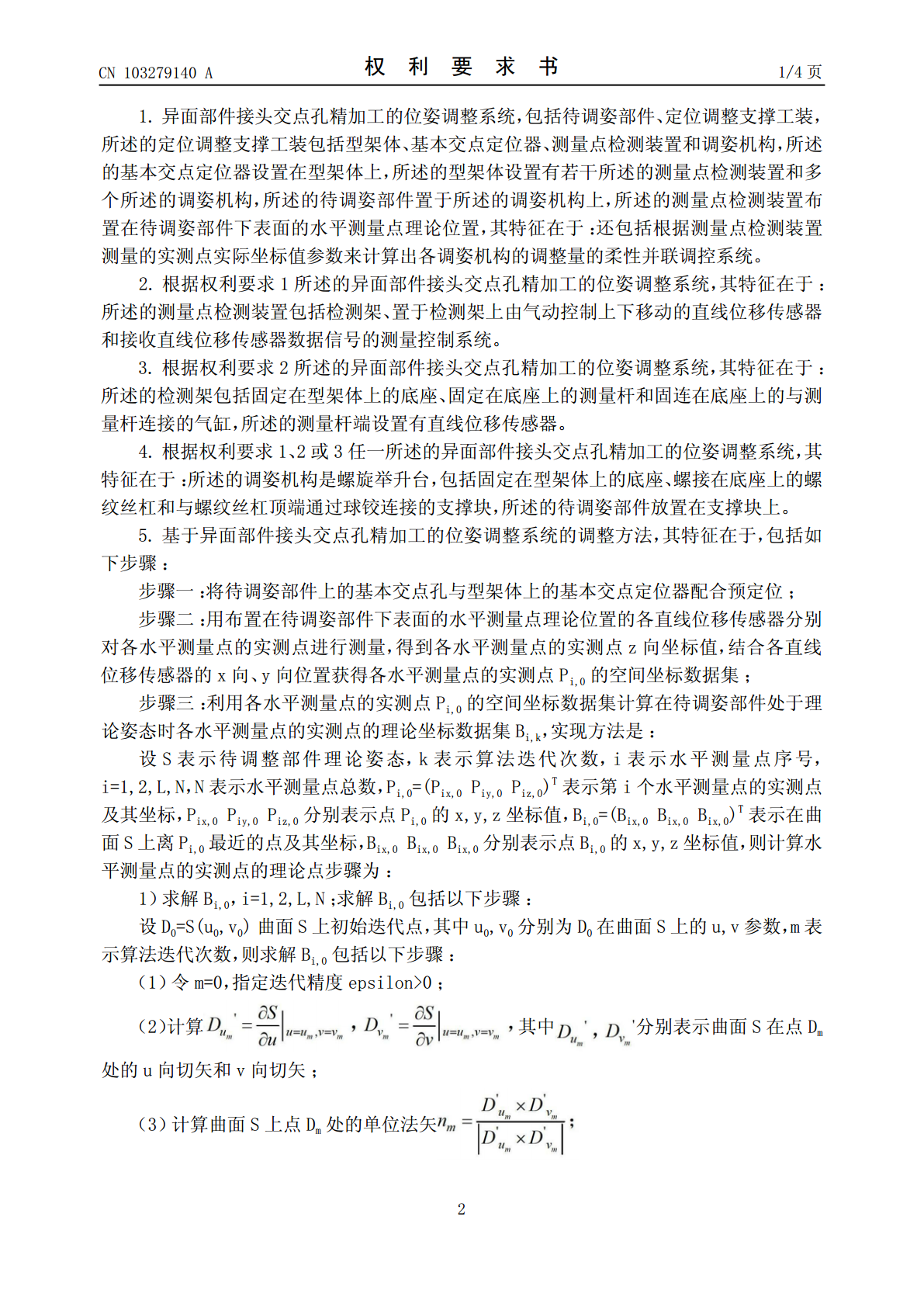
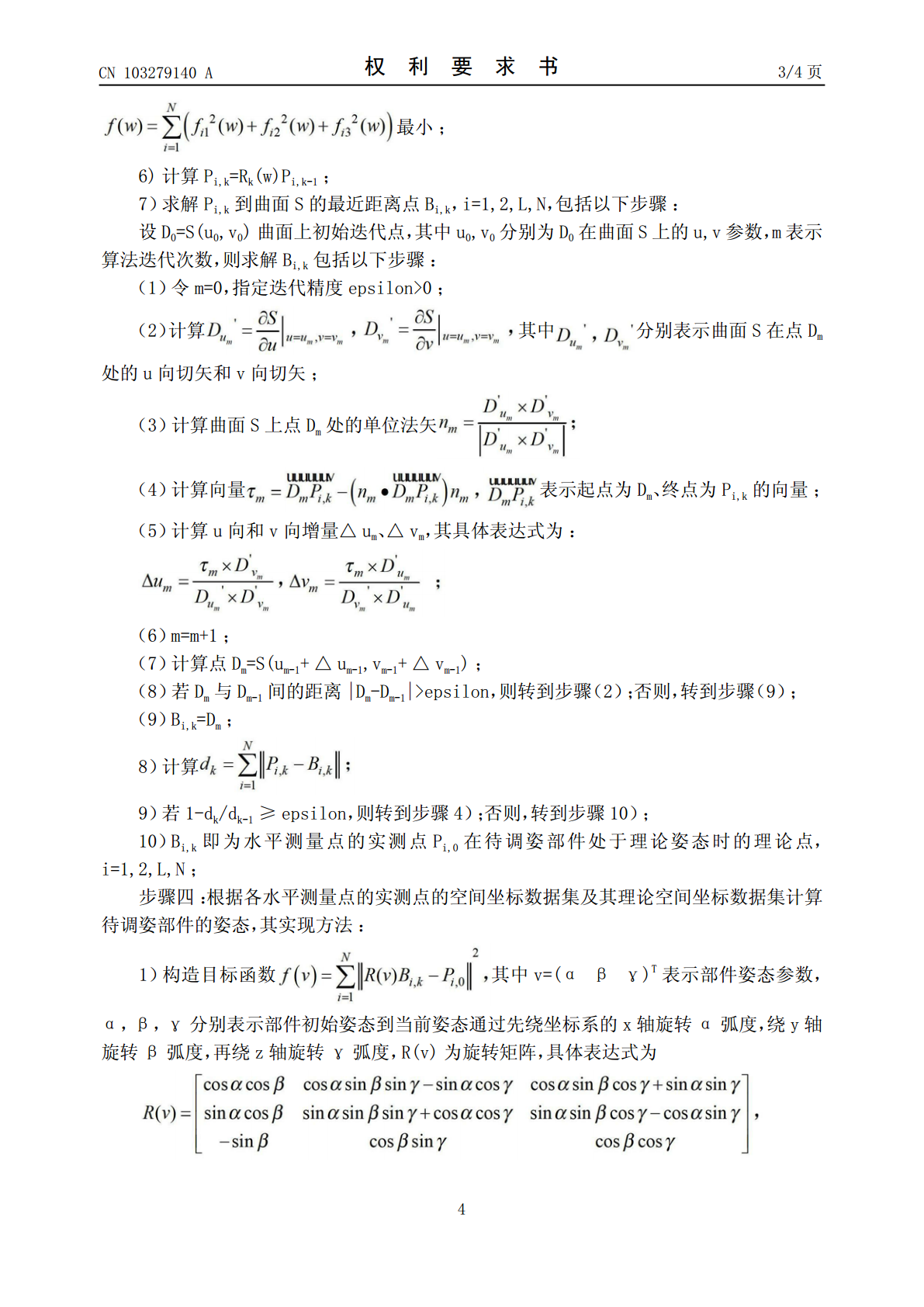
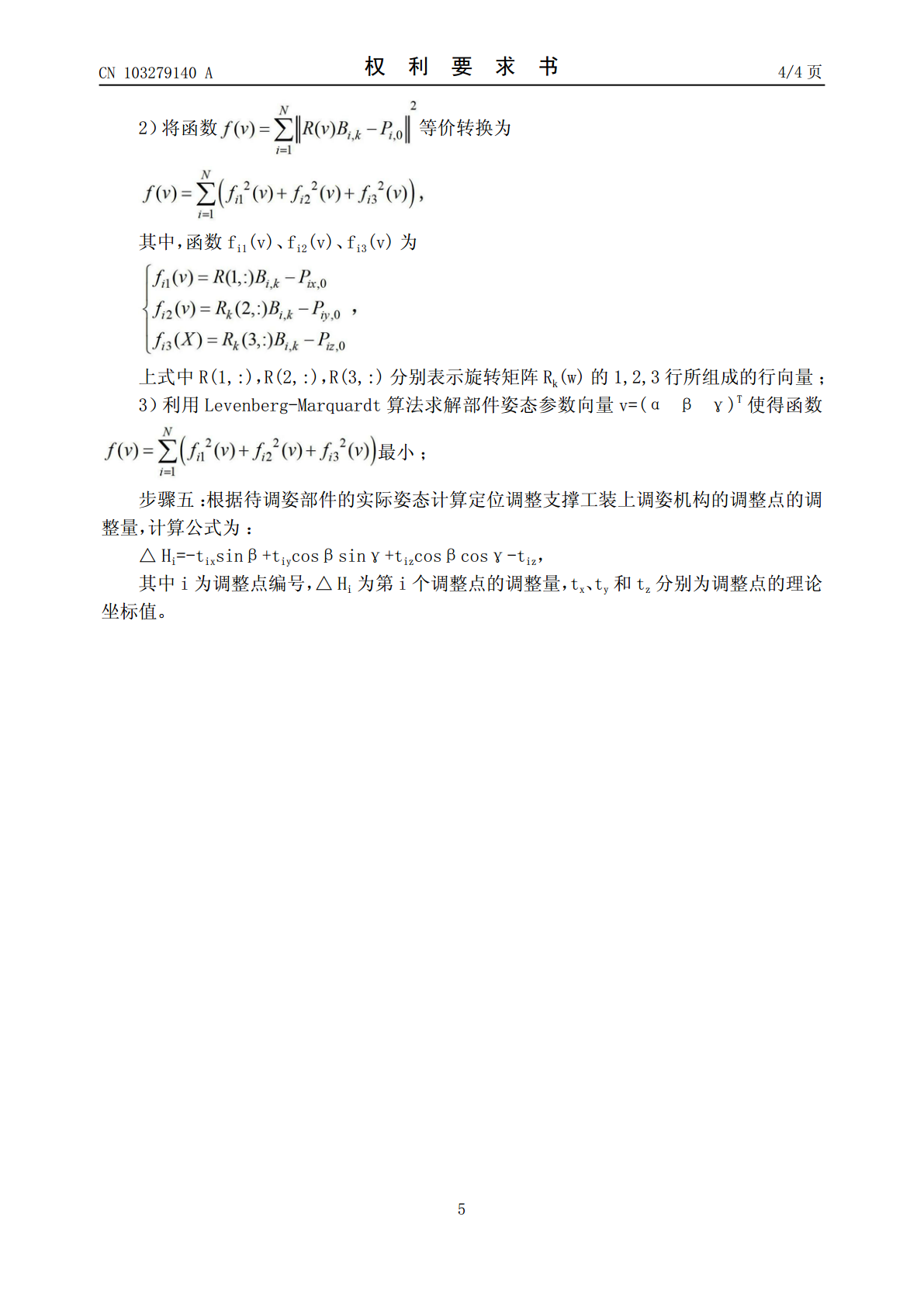
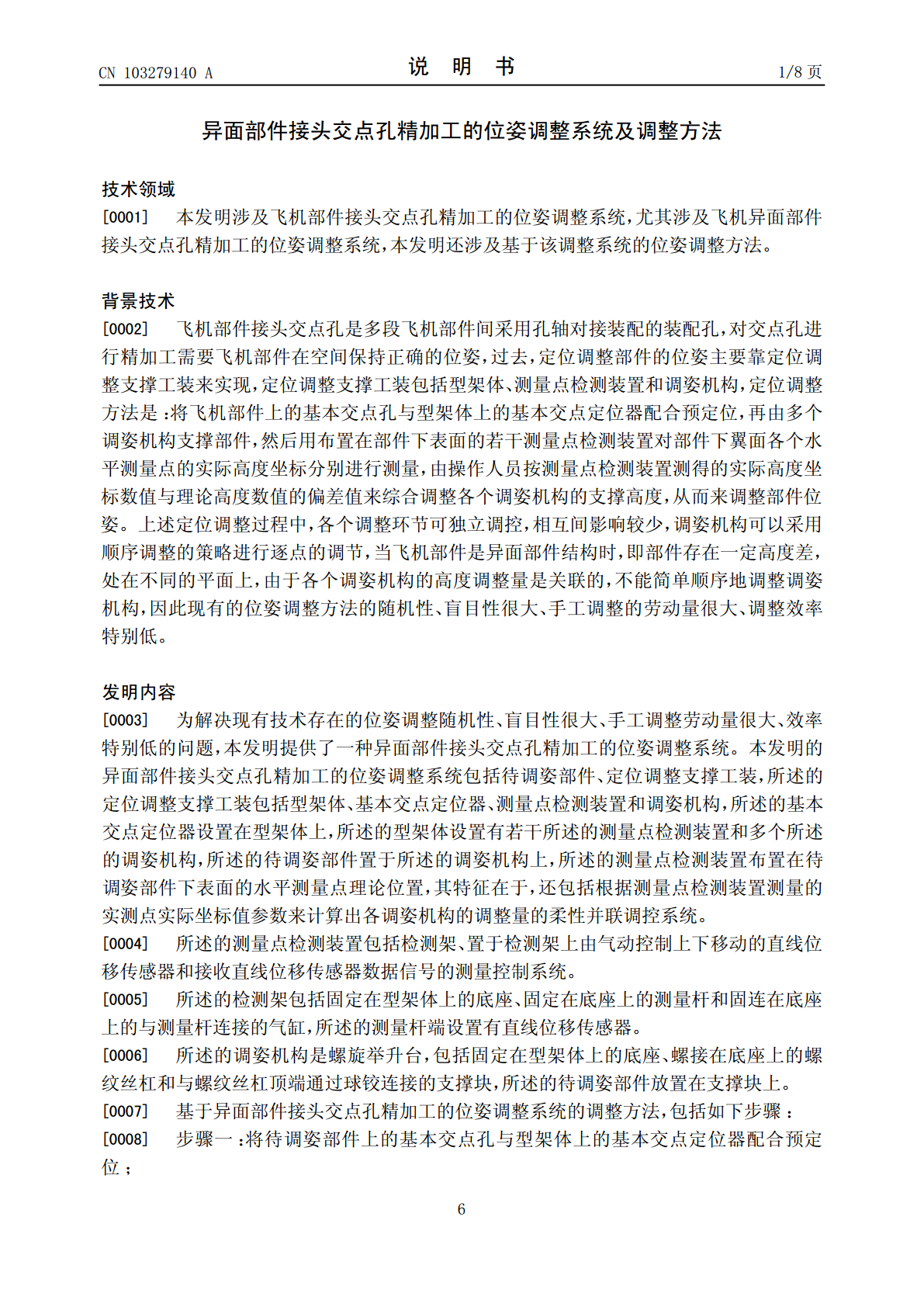
本发明异面部件接头交点孔精加工的位姿调整系统,包括待调姿部件、定位调整支撑工装,所述的定位调整支撑工装包括型架体、基本交点定位器、测量点检测装置和调姿机构,所述的基本交点定位器设置在型架体上,所述的型架体设置有若干所述的测量点检测装置和多个所述的调姿机构,所述的待调姿部件置于所述的调姿机构上,所述的测量点检测装置布置在待调姿部件下表面的水平测量点理论位置,还包括根据测量点检测装置测量的实测点实际坐标值参数来计算出各调姿机构的调整量的柔性并联调控系统。本发明位姿调整方法有五个步骤,解决了原有位姿调整方法的随
一种基于定位器的大型结构部件位姿调整方法.pdf
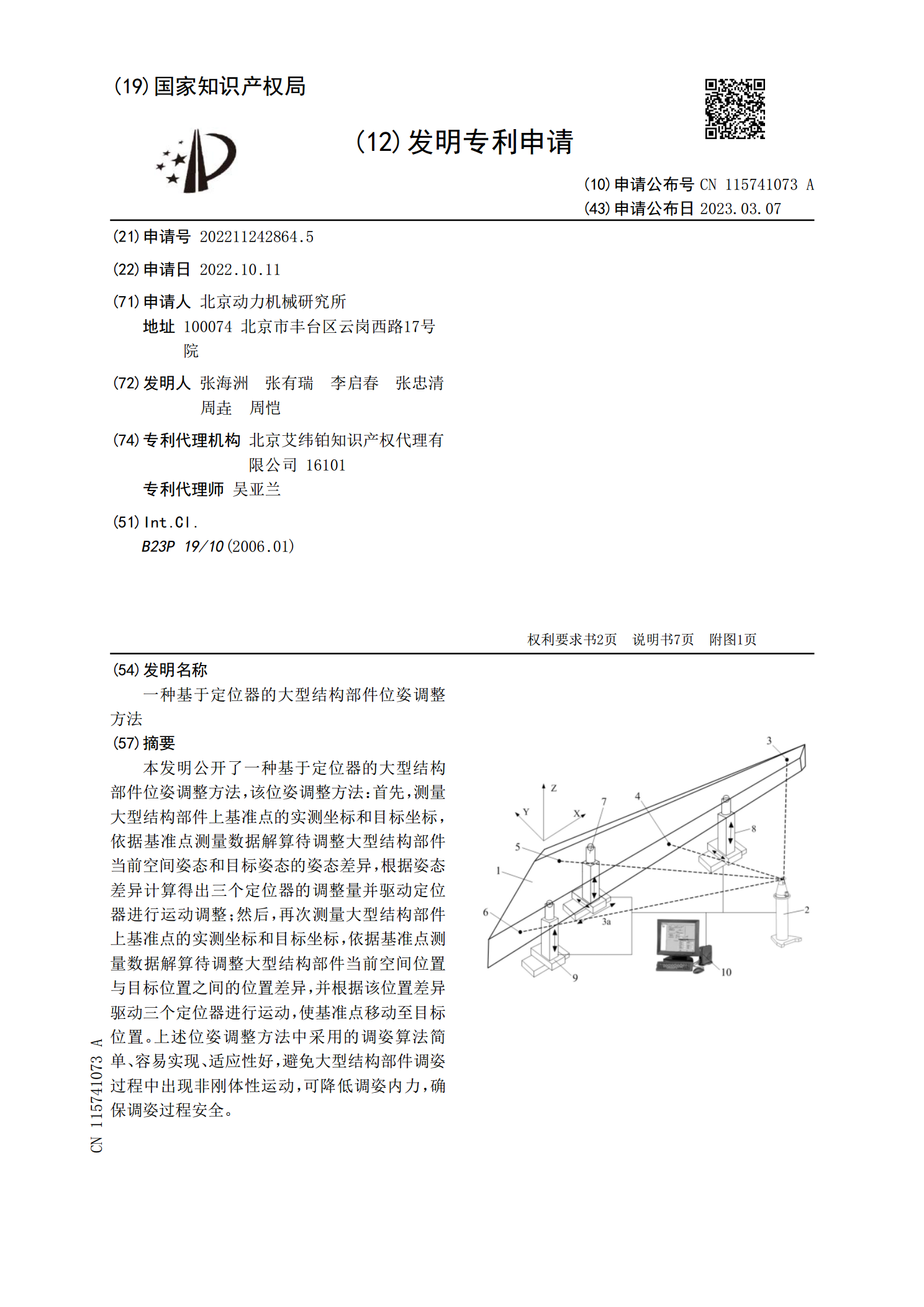
本发明公开了一种基于定位器的大型结构部件位姿调整方法,该位姿调整方法:首先,测量大型结构部件上基准点的实测坐标和目标坐标,依据基准点测量数据解算待调整大型结构部件当前空间姿态和目标姿态的姿态差异,根据姿态差异计算得出三个定位器的调整量并驱动定位器进行运动调整;然后,再次测量大型结构部件上基准点的实测坐标和目标坐标,依据基准点测量数据解算待调整大型结构部件当前空间位置与目标位置之间的位置差异,并根据该位置差异驱动三个定位器进行运动,使基准点移动至目标位置。上述位姿调整方法中采用的调姿算法简单、容易实现、适应

一种位姿自适应机器人的焊接系统及位姿调整方法.pdf
本发明提供了一种位姿自适应机器人的焊接系统及位姿调整方法,所述焊接系统包括焊接机器人、与所述焊接机器人通讯连接的主控机以及与所述主控机通讯连接的检测跟踪系统,所述检测跟踪系统包括设于焊枪上的用以检测焊缝的轮廓的线激光传感器以及设于焊枪上且位于焊枪的相对两侧的两个点激光传感器;所述主控机根据两个点激光传感器以及线激光传感器测得的数据得到所述焊接机器人的标准位姿并根据该标准位姿调整所述焊接机器人的位姿,从而在焊接进程中不断修正焊接机器人的位姿,使焊接机器人一直处于标准位姿下对工件进行焊接,能够适应焊接变形较大
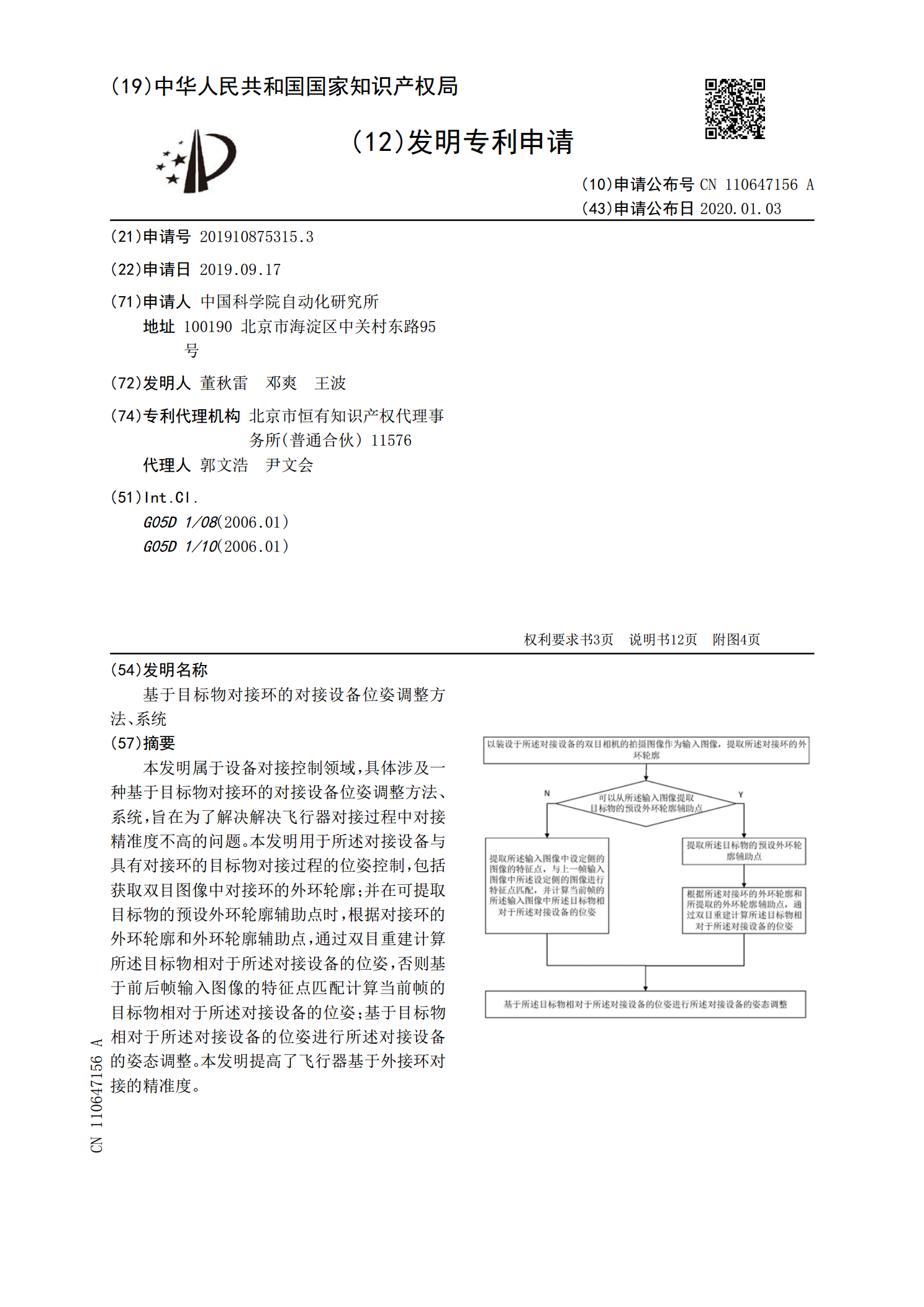
基于目标物对接环的对接设备位姿调整方法、系统.pdf
本发明属于设备对接控制领域,具体涉及一种基于目标物对接环的对接设备位姿调整方法、系统,旨在为了解决解决飞行器对接过程中对接精准度不高的问题。本发明用于所述对接设备与具有对接环的目标物对接过程的位姿控制,包括获取双目图像中对接环的外环轮廓;并在可提取目标物的预设外环轮廓辅助点时,根据对接环的外环轮廓和外环轮廓辅助点,通过双目重建计算所述目标物相对于所述对接设备的位姿,否则基于前后帧输入图像的特征点匹配计算当前帧的目标物相对于所述对接设备的位姿;基于目标物相对于所述对接设备的位姿进行所述对接设备的姿态调整。本
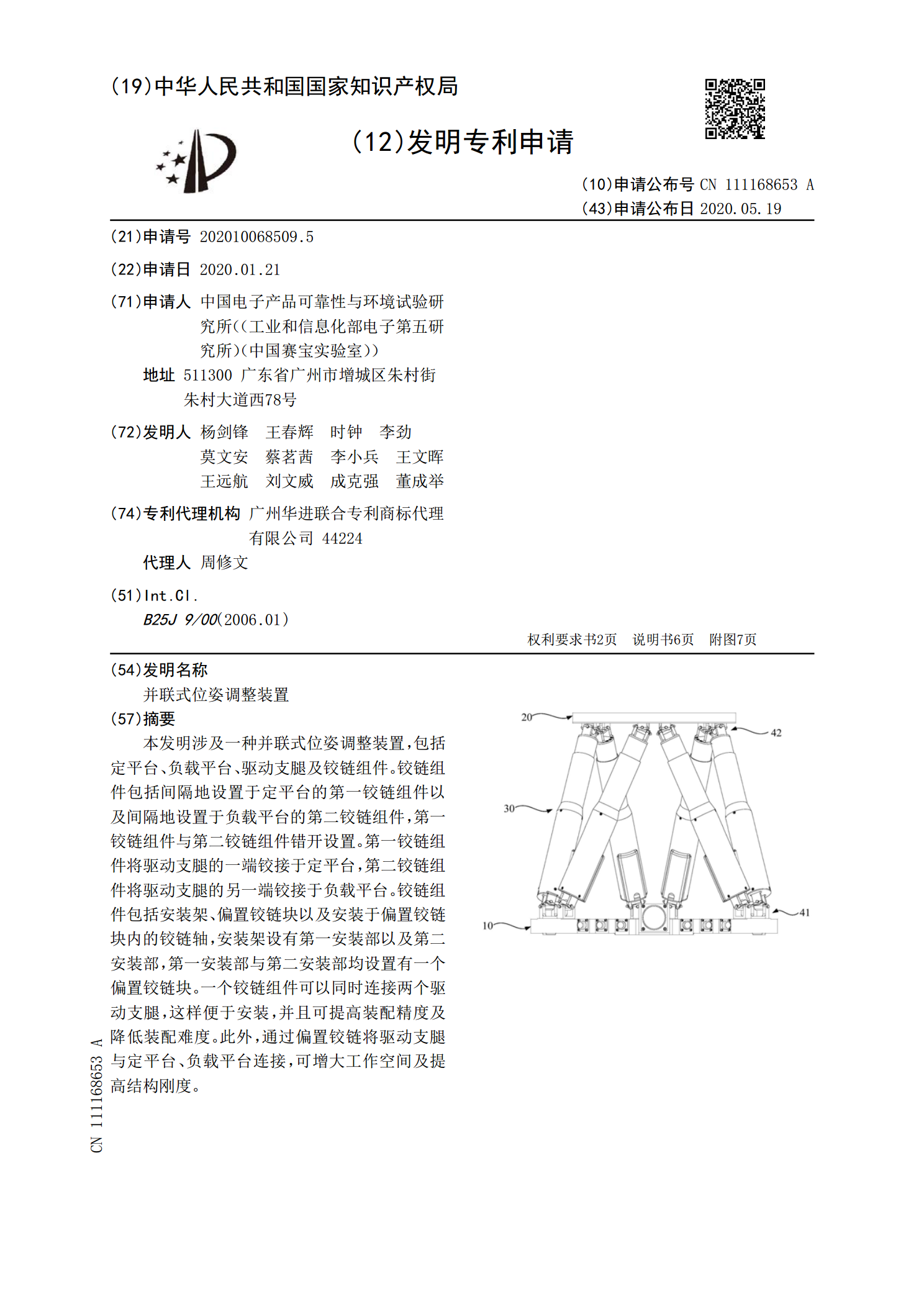
并联式位姿调整装置.pdf
本发明涉及一种并联式位姿调整装置,包括定平台、负载平台、驱动支腿及铰链组件。铰链组件包括间隔地设置于定平台的第一铰链组件以及间隔地设置于负载平台的第二铰链组件,第一铰链组件与第二铰链组件错开设置。第一铰链组件将驱动支腿的一端铰接于定平台,第二铰链组件将驱动支腿的另一端铰接于负载平台。铰链组件包括安装架、偏置铰链块以及安装于偏置铰链块内的铰链轴,安装架设有第一安装部以及第二安装部,第一安装部与第二安装部均设置有一个偏置铰链块。一个铰链组件可以同时连接两个驱动支腿,这样便于安装,并且可提高装配精度及降低装配难