
一种车载无盲区定位导航和行车姿态测量装置及测量方法.pdf

书生****写意

1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载无盲区定位导航和行车姿态测量装置及测量方法.pdf
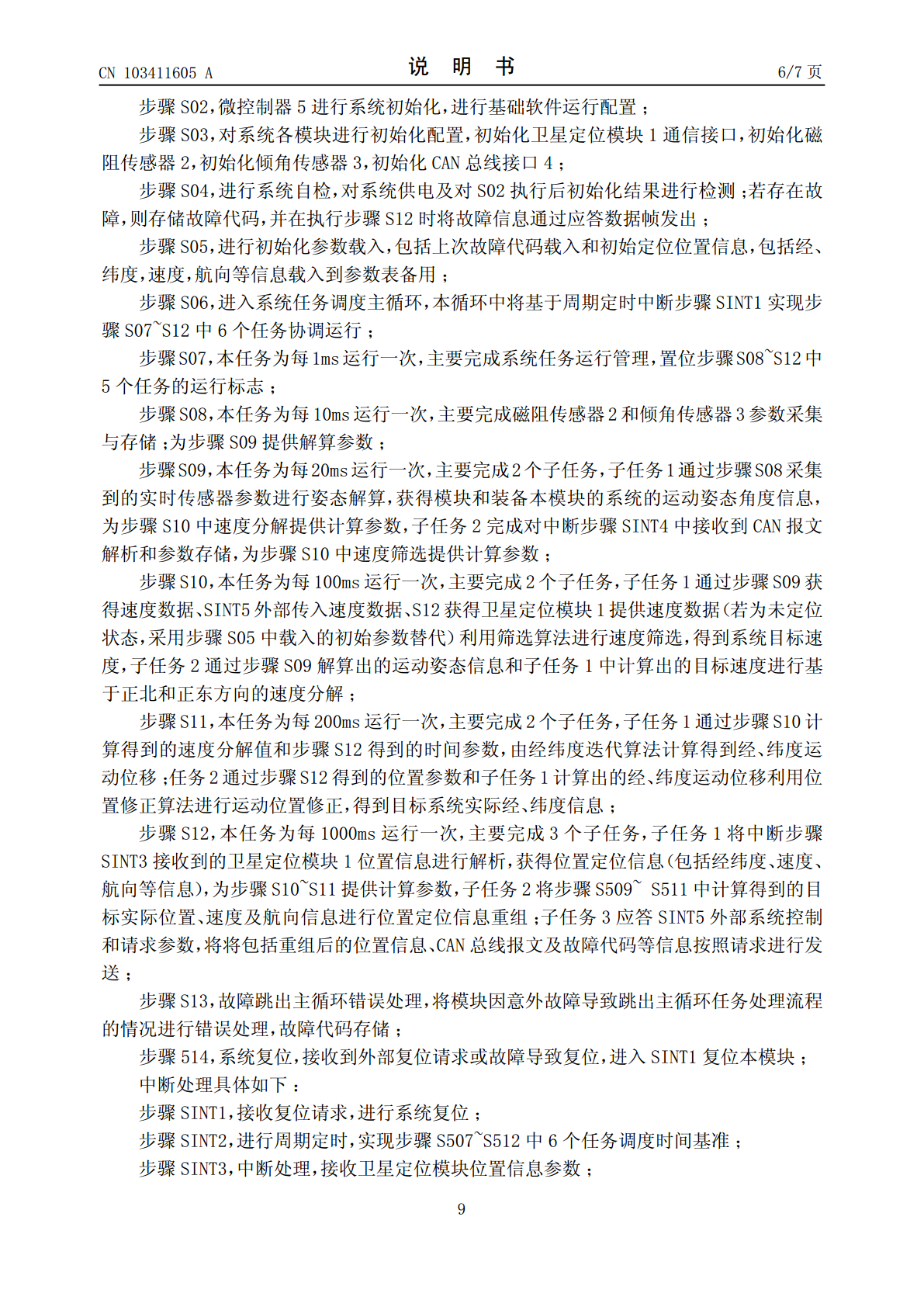
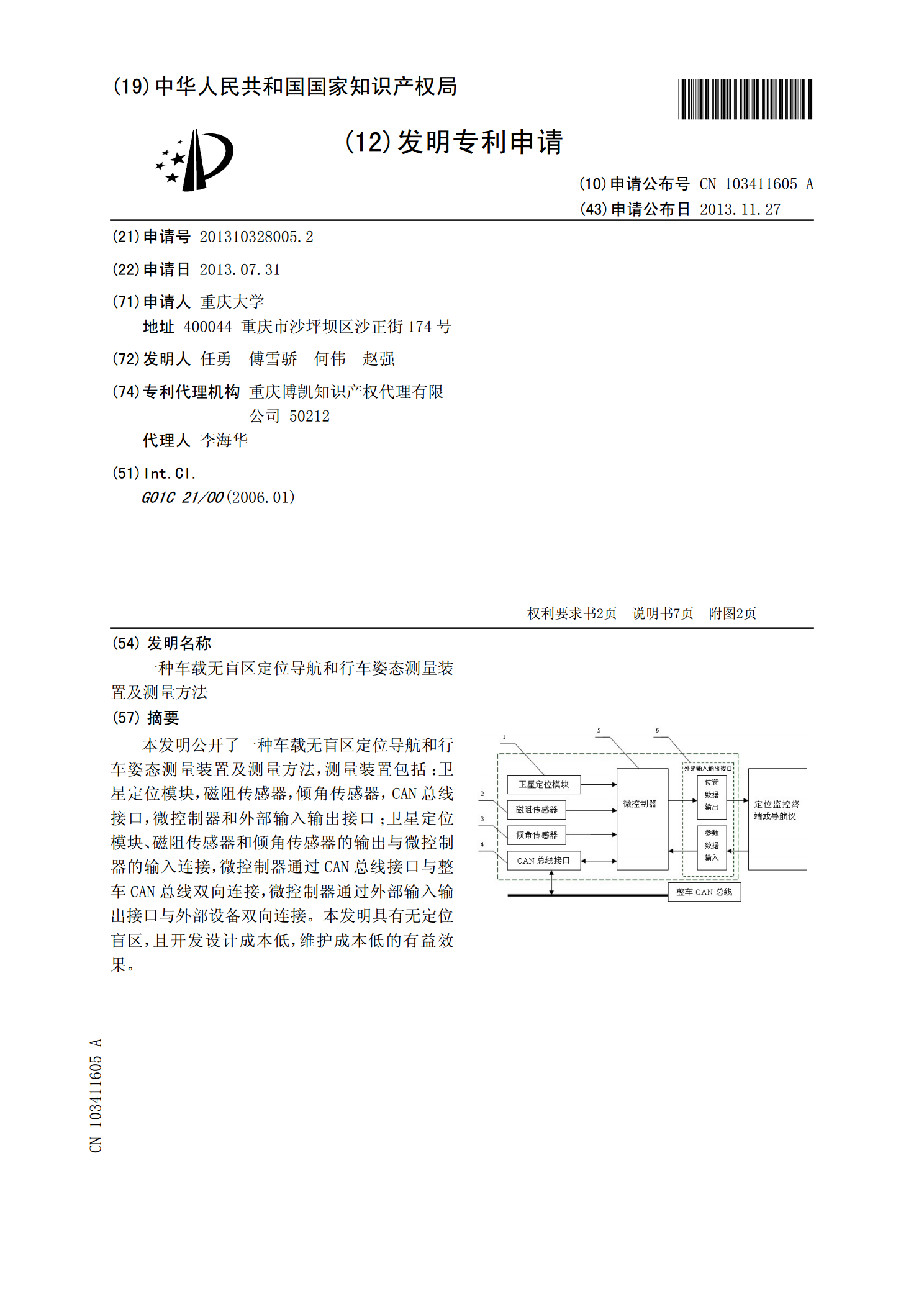
本发明公开了一种车载无盲区定位导航和行车姿态测量装置及测量方法,测量装置包括:卫星定位模块,磁阻传感器,倾角传感器,CAN总线接口,微控制器和外部输入输出接口;卫星定位模块、磁阻传感器和倾角传感器的输出与微控制器的输入连接,微控制器通过CAN总线接口与整车CAN总线双向连接,微控制器通过外部输入输出接口与外部设备双向连接。本发明具有无定位盲区,且开发设计成本低,维护成本低的有益效果。

一种姿态测量方法和装置.pdf
本发明提供一种姿态测量方法和装置,加载目标模型,还包括:接收至少两帧目标图像,并提取每一帧目标图像中的目标轮廓序列;获取所述目标模型的目标投影图像,并提取所述目标投影图像中的模拟目标轮廓序列;循环执行N1至N3,直至所述每一帧目标图像对应的目标姿态均被确定:N1:将当前模拟目标轮廓序列与当前帧的目标轮廓序列进行匹配;N2:确定匹配后的模拟目标轮廓序列对应的目标模型姿态为目标姿态;N3:判断当前帧是否为最后一帧,如果否,则将当前帧对应的目标姿态作为下一帧的模拟目标轮廓序列的初始姿态,并将下一帧作为当前帧,执

超声检测盲区减小和探头姿态测量方法.docx
超声检测盲区减小和探头姿态测量方法超声检测是一种常用的无损检测技术,可用于材料内部的缺陷检测和尺寸测量。然而,由于探头与被测物体之间的空气阻挡、材料表面不平坦和探头接触不良等因素会导致超声检测盲区的出现,影响检测结果的准确性。本文介绍了几种方法来减小超声检测盲区并且提高探头姿态的精度。一、超声检测盲区的原因分析在超声检测过程中,探头发送的超声波经过材料内部时会受到反射和散射,从而形成回波信号,通过分析回波信号可以得到材料内部的缺陷信息。然而,由于以下原因,探头在检测过程中会出现一定的盲区,导致检测准确性降

一种水下导航姿态测量方法.pdf
本发明涉及的是一种信息测量方法,具体地说是一种潜器水下航行时,多普勒计程仪对水工作模式下,捷联惯性导航系统\多普勒计程仪水下组合导航姿态测量方法。本发明包括如下步骤:连接潜器装备的捷联惯性导航系统和多普勒计程仪;递推测量潜器的姿态值、速度值与位置值;记录潜器开始下潜时刻速度值;查找潜器航行海域内,洋流模型东向参数βx和洋流模型北向参数βy;递推测量洋流的速度;实时采集多普勒计程仪对水速度值;实时估测出捷联惯性导航系统姿态误差;测量准确的潜器捷联惯性导航系统姿态值。本发明在补偿洋流速度后,航向、纵摇和横摇误
一种无盲区车载GPS跟踪定位系统.pdf
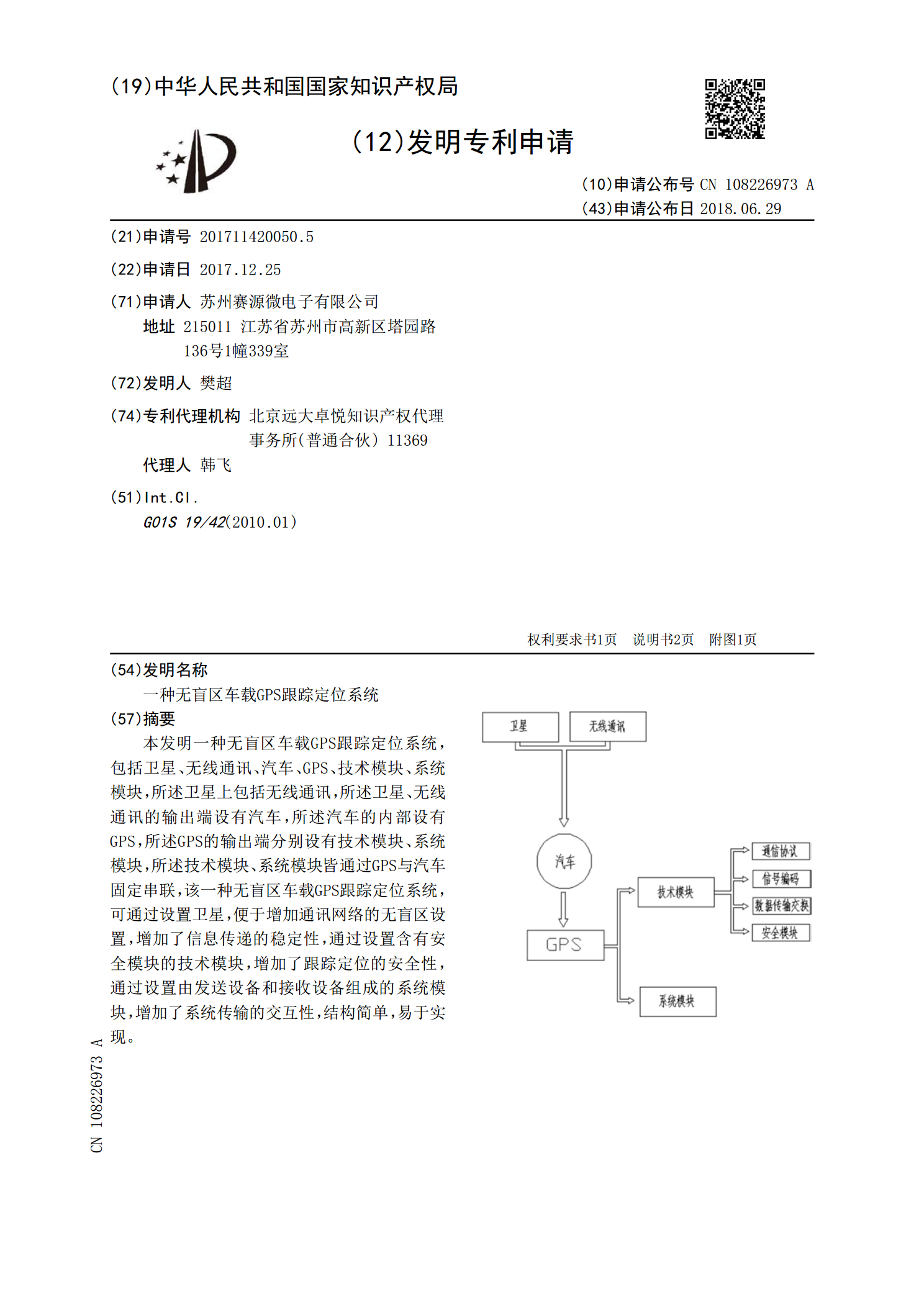
本发明一种无盲区车载GPS跟踪定位系统,包括卫星、无线通讯、汽车、GPS、技术模块、系统模块,所述卫星上包括无线通讯,所述卫星、无线通讯的输出端设有汽车,所述汽车的内部设有GPS,所述GPS的输出端分别设有技术模块、系统模块,所述技术模块、系统模块皆通过GPS与汽车固定串联,该一种无盲区车载GPS跟踪定位系统,可通过设置卫星,便于增加通讯网络的无盲区设置,增加了信息传递的稳定性,通过设置含有安全模块的技术模块,增加了跟踪定位的安全性,通过设置由发送设备和接收设备组成的系统模块,增加了系统传输的交互性,结构