
一种水下导航姿态测量方法.pdf

青团****青吖


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种水下导航姿态测量方法.pdf
本发明涉及的是一种信息测量方法,具体地说是一种潜器水下航行时,多普勒计程仪对水工作模式下,捷联惯性导航系统\多普勒计程仪水下组合导航姿态测量方法。本发明包括如下步骤:连接潜器装备的捷联惯性导航系统和多普勒计程仪;递推测量潜器的姿态值、速度值与位置值;记录潜器开始下潜时刻速度值;查找潜器航行海域内,洋流模型东向参数βx和洋流模型北向参数βy;递推测量洋流的速度;实时采集多普勒计程仪对水速度值;实时估测出捷联惯性导航系统姿态误差;测量准确的潜器捷联惯性导航系统姿态值。本发明在补偿洋流速度后,航向、纵摇和横摇误

一种双差GPS/SINS组合导航姿态测量方法.pdf
本发明公开了一种双差GPS/SINS组合导航姿态测量方法,首先进行捷联捷联惯导系统的初始对准,可以得到载体坐标系b到导航坐标系n的初始姿态矩阵;进而可以计算出载体的初始姿态值;利用捷联惯导系统的位置、速度、姿态及惯性传感器的误差方程,建立扩展卡尔曼滤波器的状态方程;利用计算得到载波相位误差δφ和多普勒速度误差δD建立扩展卡尔曼滤波器的观测方程;利用扩展卡尔曼滤波器进行实时估测捷联惯导系统姿态误差;利用得到的姿态误差进行修正姿态矩阵,并计算出捷联惯导系统新的姿态值。本发明的方法是在不需要计算整周模糊度,并且
一种车载无盲区定位导航和行车姿态测量装置及测量方法.pdf
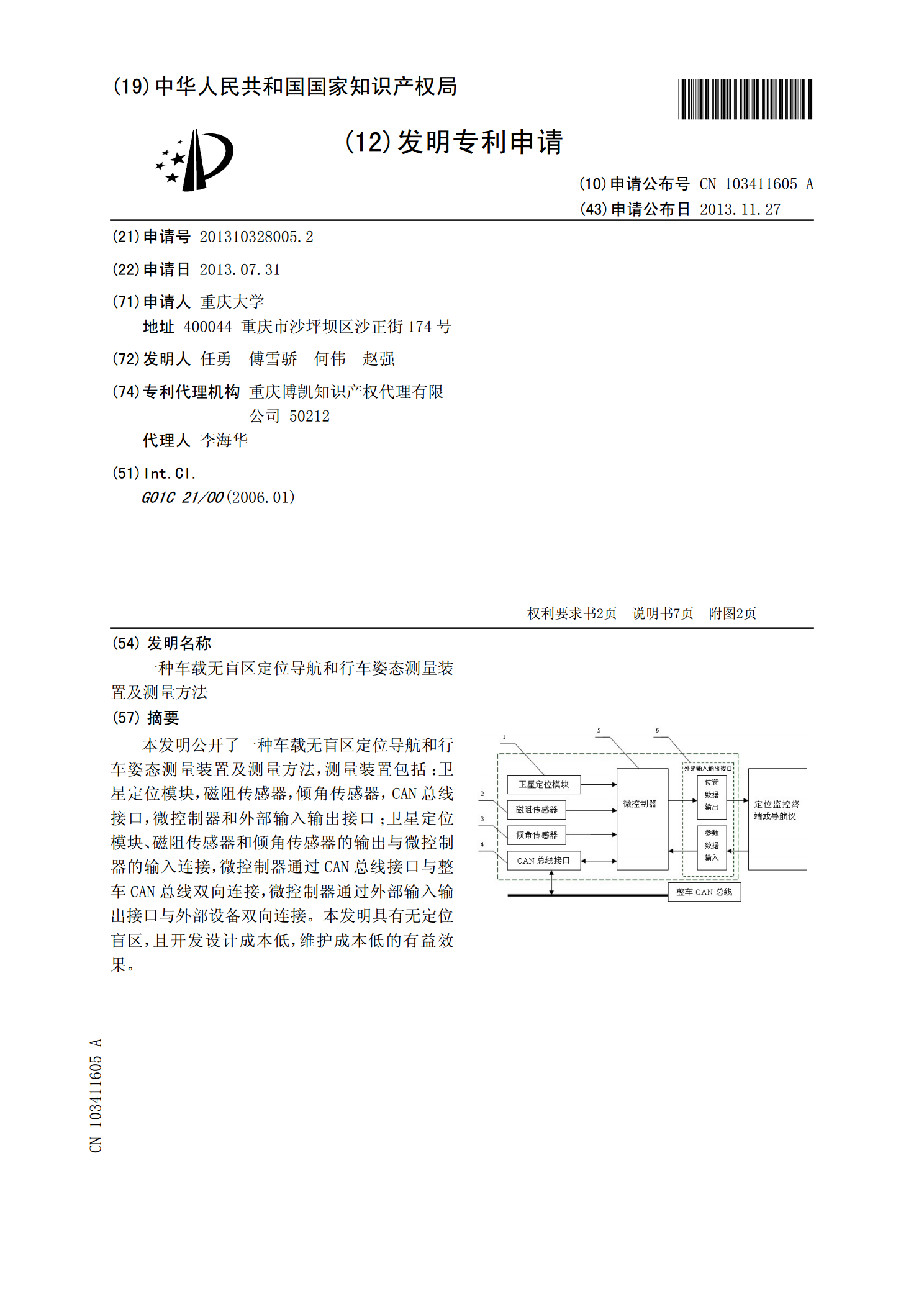
本发明公开了一种车载无盲区定位导航和行车姿态测量装置及测量方法,测量装置包括:卫星定位模块,磁阻传感器,倾角传感器,CAN总线接口,微控制器和外部输入输出接口;卫星定位模块、磁阻传感器和倾角传感器的输出与微控制器的输入连接,微控制器通过CAN总线接口与整车CAN总线双向连接,微控制器通过外部输入输出接口与外部设备双向连接。本发明具有无定位盲区,且开发设计成本低,维护成本低的有益效果。
一种水下测量的设备与水下测量方法.pdf
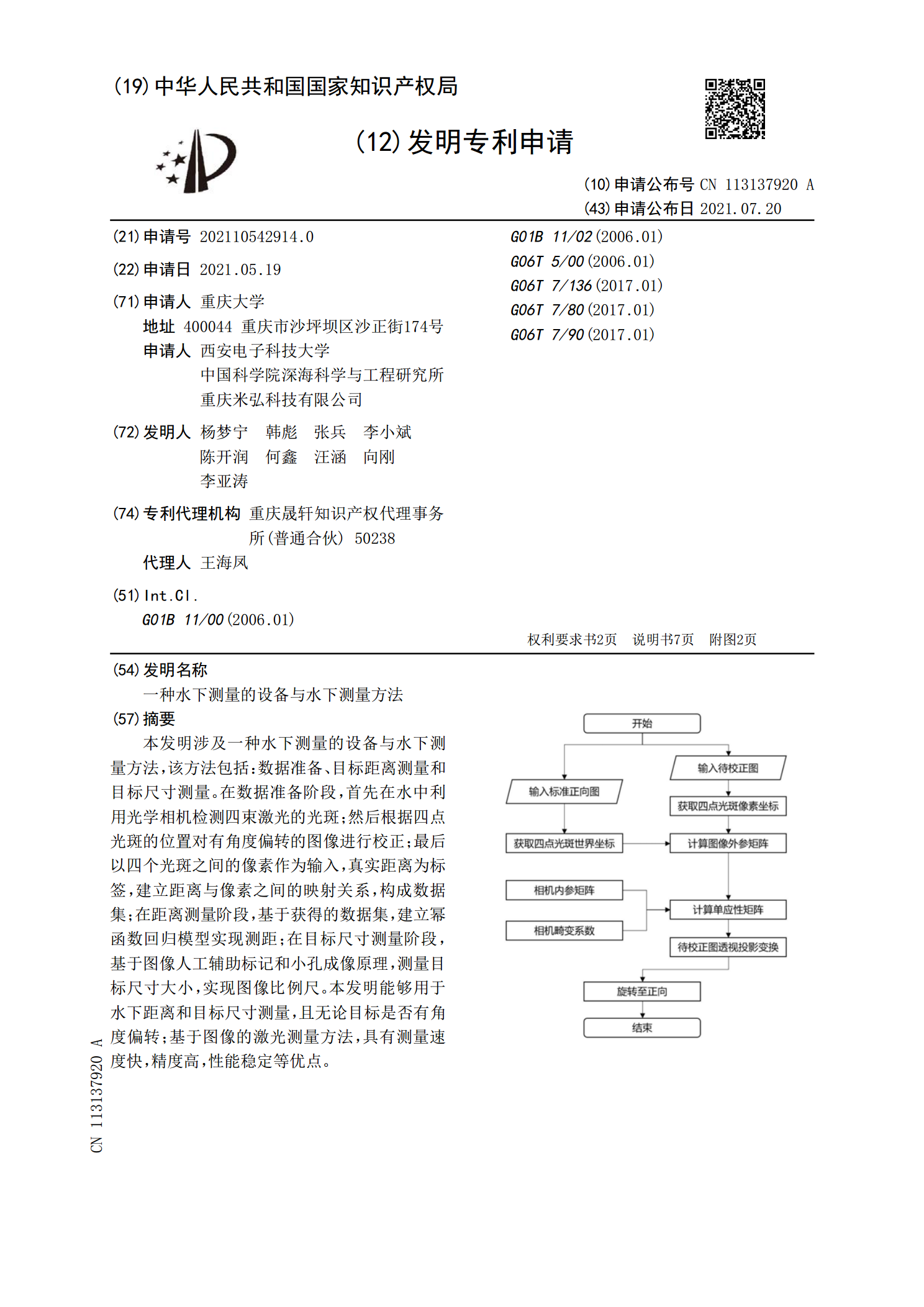
本发明涉及一种水下测量的设备与水下测量方法,该方法包括:数据准备、目标距离测量和目标尺寸测量。在数据准备阶段,首先在水中利用光学相机检测四束激光的光斑;然后根据四点光斑的位置对有角度偏转的图像进行校正;最后以四个光斑之间的像素作为输入,真实距离为标签,建立距离与像素之间的映射关系,构成数据集;在距离测量阶段,基于获得的数据集,建立幂函数回归模型实现测距;在目标尺寸测量阶段,基于图像人工辅助标记和小孔成像原理,测量目标尺寸大小,实现图像比例尺。本发明能够用于水下距离和目标尺寸测量,且无论目标是否有角度偏转;

一种水下移动平台导航方法以及水下移动平台导航装置.pdf
本申请提供了一种水下移动平台导航方法。所述水下移动平台导航方法包括:获取捷联式惯性导航系统生成的第一导航信息;获取多普勒速度声呐系统生成的第二导航信息;获取北斗卫星导航系统或者磁罗盘系统生成的修正导航信息;根据第一导航信息以及第二导航信息生成第一融合导航信息;根据第一融合导航信息以及修正导航信息生成第二融合导航信息;根据第二融合导航信息生成导航控制信息;根据导航控制信息控制水下移动平台运动。本申请的水下移动平台导航方法通过组合导航技术进行修正误差的辅助导航技术,旨在采用高精度的导航技术对SINS随时间累积