
畸变图像校正复原与分析报警的方法和装置.pdf

映雁****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
畸变图像校正复原与分析报警的方法和装置.pdf
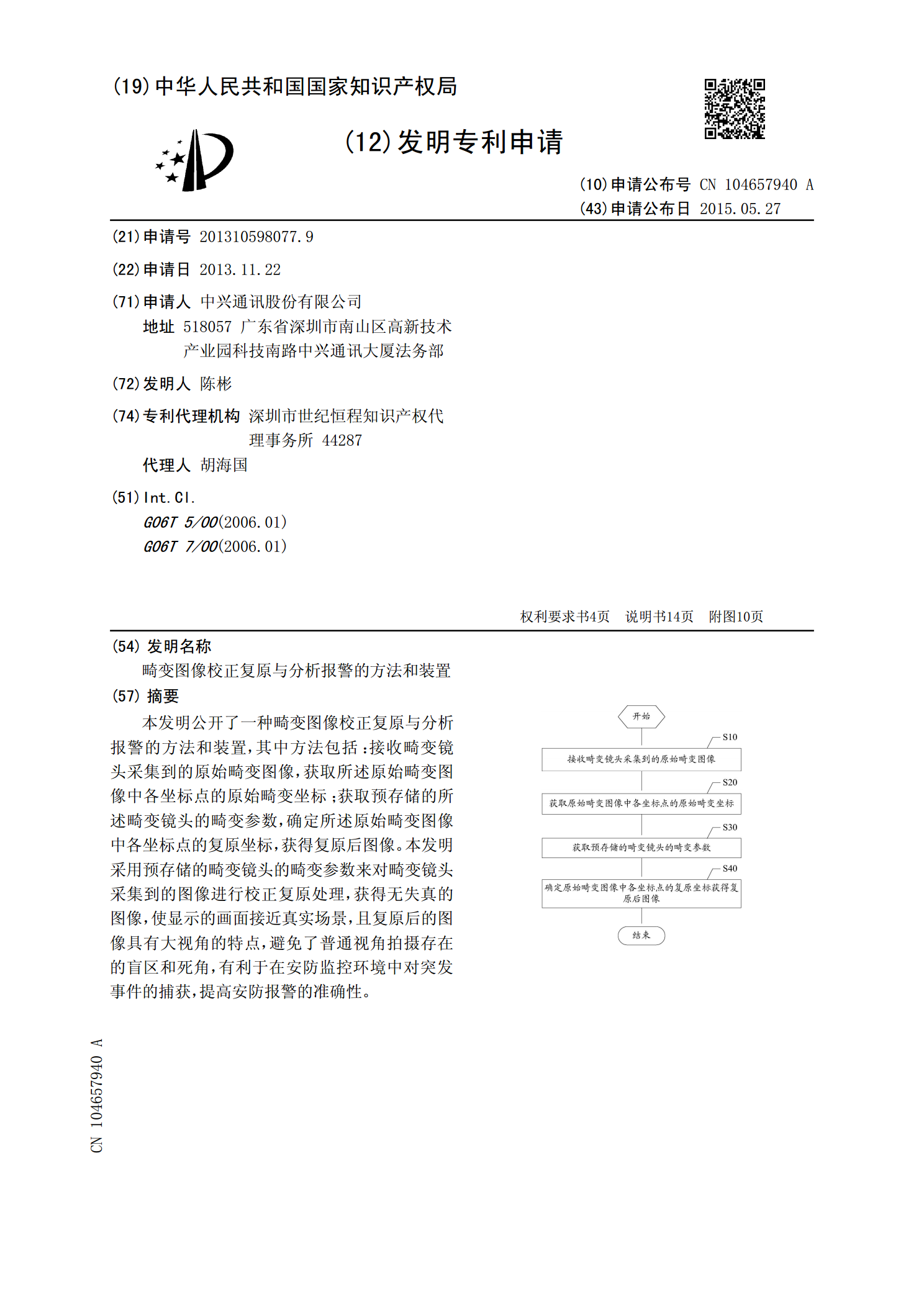
本发明公开了一种畸变图像校正复原与分析报警的方法和装置,其中方法包括:接收畸变镜头采集到的原始畸变图像,获取所述原始畸变图像中各坐标点的原始畸变坐标;获取预存储的所述畸变镜头的畸变参数,确定所述原始畸变图像中各坐标点的复原坐标,获得复原后图像。本发明采用预存储的畸变镜头的畸变参数来对畸变镜头采集到的图像进行校正复原处理,获得无失真的图像,使显示的画面接近真实场景,且复原后的图像具有大视角的特点,避免了普通视角拍摄存在的盲区和死角,有利于在安防监控环境中对突发事件的捕获,提高安防报警的准确性。

基于图像轮廓的图像畸变校正方法和装置.pdf
本发明实施例公开了一种图像畸变校正方法和装置,该方法包括步骤:提取源图像的图像轮廓;根据图像轮廓获取畸变信息;以及采用畸变信息对源图像进行校正,以与目标图像配准。采用本发明方法和装置,避免了磁共振扩散加权图像中对比度、b值和方向变化等对校正的影响,并且不需要额外的参考扫描,实现了方便、快速、准确的图像畸变校正。

全景泊车图像畸变校正方法及装置.pdf
本发明提供的全景泊车图像畸变校正方法及装置,通过在物理坐标系下,以设于车身的广角的图像采集装置为中心建立一个虚拟柱面,其中,所述虚拟柱面的中轴方向可变;利用标定数据,将图像采集装置所采集画面反向投影至该虚拟柱面上以形成重投影图像;将所述虚拟柱面上的重投影图像裁切输出;不仅消除了画面上的严重畸变,又保留了足够的原始图像信息,并且,输出图像为一个与摄像机安装角度无关的更加灵活的可变视角,使得画面更加直观。
图像畸变的校正方法、装置、电子设备和存储介质.pdf
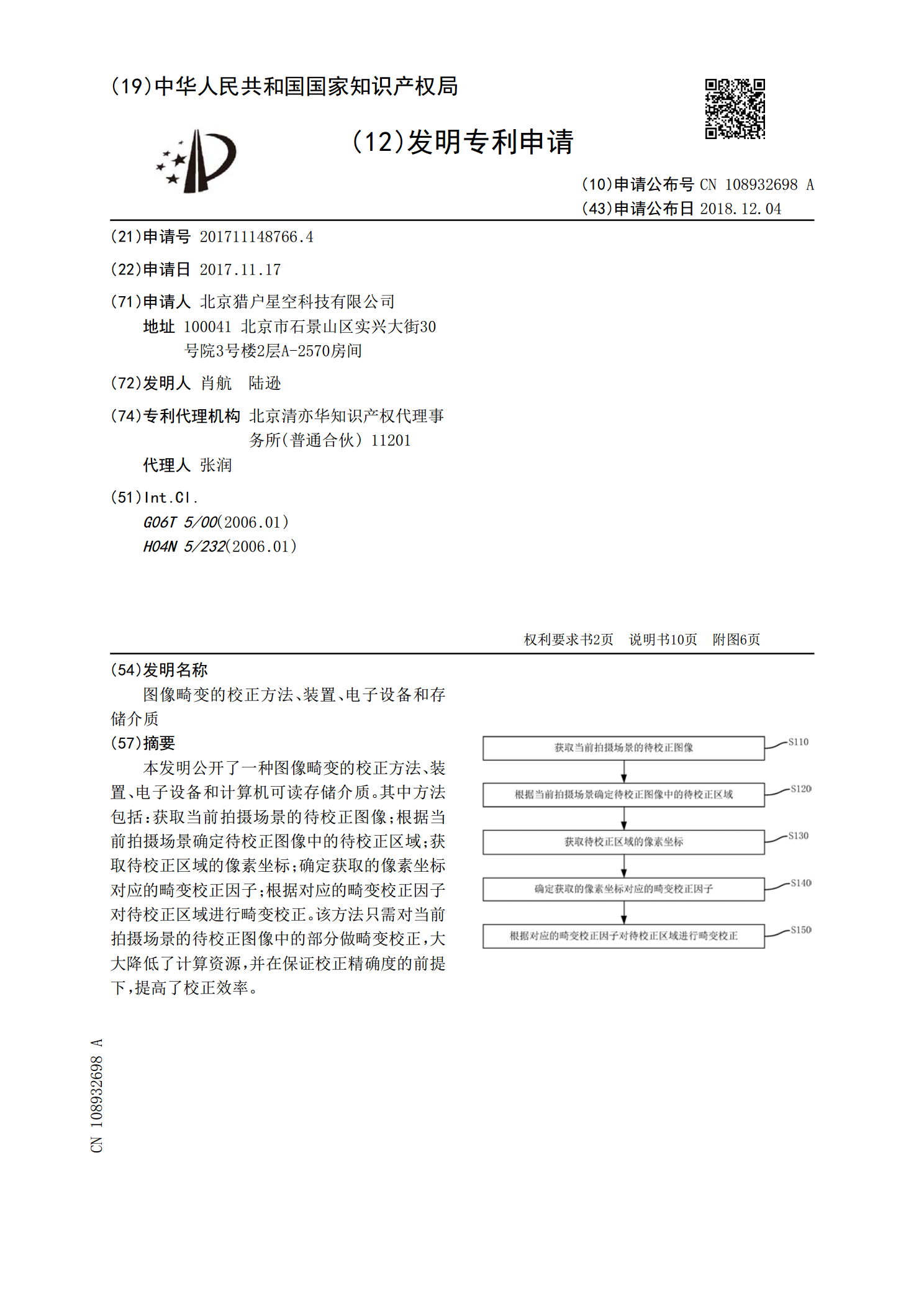
本发明公开了一种图像畸变的校正方法、装置、电子设备和计算机可读存储介质。其中方法包括:获取当前拍摄场景的待校正图像;根据当前拍摄场景确定待校正图像中的待校正区域;获取待校正区域的像素坐标;确定获取的像素坐标对应的畸变校正因子;根据对应的畸变校正因子对待校正区域进行畸变校正。该方法只需对当前拍摄场景的待校正图像中的部分做畸变校正,大大降低了计算资源,并在保证校正精确度的前提下,提高了校正效率。

图像复原模型训练方法、装置及图像复原方法和装置.pdf
本申请提供了一种图像复原模型训练方法、装置及图像复原方法和装置,其中,图像复原模型训练方法包括:将具有像素损失区域的待处理图像输入图像生成神经网络,对所述待处理图像进行复原,得到所述待处理图像的伪造图像;将所述待处理图像的原始图像以及所述伪造图像输入图像判别神经网络,使用所述图像判别神经网络为所述原始图像和所述伪造图像进行分类;基于所述伪造图像和所述原始图像的比对结果,对所述图像生成神经网络进行本轮训练,以及基于分类结果对所述图像判别神经网络进行本轮训练;经过对所述图像生成神经网络、图像判别神经网络的多轮