
GNSS盲区中基于VANET车辆间协作的惯性导航定位方法.pdf

一条****发啊


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

GNSS盲区中基于VANET车辆间协作的惯性导航定位方法.pdf
本发明公开了GNSS盲区中基于VANET车辆间协作的惯性导航定位方法,该方法在GNSS盲区使用惯性导航定位技术进行单独定位的基础上,引入协作定位的理念,解决GNSS盲区中单独使用惯性导航INS进行定位时定位误差随时间积累造成的定位性能较差问题,包括:首先,车辆之间通过DSRC进行通信,共享车辆自身的INS位置信息、里程仪的速度信息,ID等;其次,各车辆根据接收到的邻近车辆的速度信息等检测车辆与邻近车辆“相遇”时刻;再次,根据相遇时刻得到车辆相遇时的距离;然后,利用航位推算将本地的INS位置信息和车辆之间的
基于卫星导航与惯性导航的无盲区车辆定位系统和方法.pdf
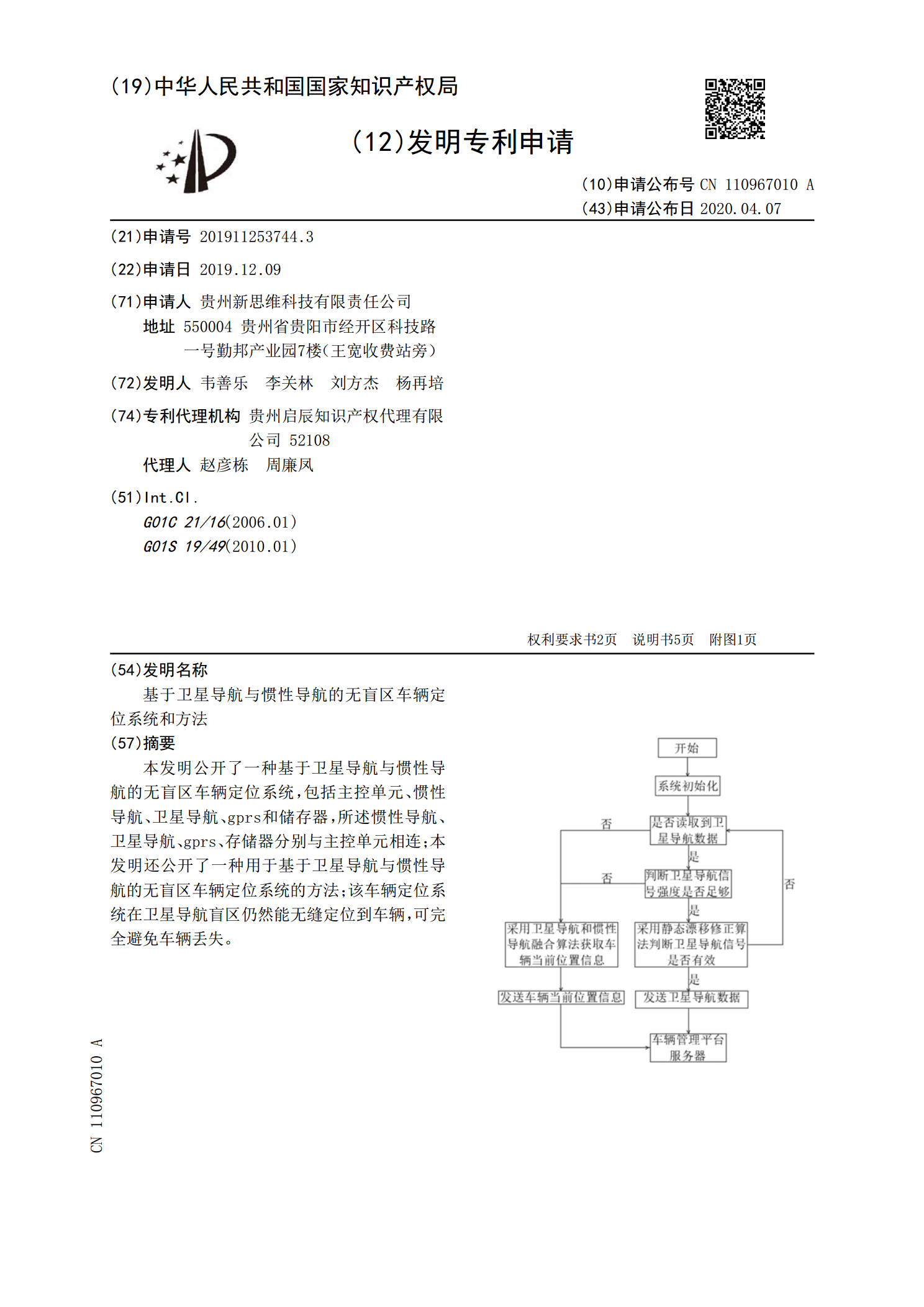
本发明公开了一种基于卫星导航与惯性导航的无盲区车辆定位系统,包括主控单元、惯性导航、卫星导航、gprs和储存器,所述惯性导航、卫星导航、gprs、存储器分别与主控单元相连;本发明还公开了一种用于基于卫星导航与惯性导航的无盲区车辆定位系统的方法;该车辆定位系统在卫星导航盲区仍然能无缝定位到车辆,可完全避免车辆丢失。

VANET中基于INS和GNSS伪距双差的协作相对定位方法.pdf
本发明公开了VANET中基于INS和GNSS伪距双差的协作相对定位方法,该方法定位精度高,适用性好的车辆间协作相对定位方法。本发明涉及车辆在GNSS信号非盲区的定位问题,主要解决GNSS定位精度不高和适用性受限情况下的车辆相对定位问题。首先,通过车辆之间的V2V通信,共享被高精度里程仪修正后的INS提供的加速度信息以及车辆GNSS位置信息等,实现车辆之间的相应信息共享;其次,通过扩展卡尔曼滤波技术对经过V2V通信接收到的邻近车辆的信息和本车信息进行信息融合处理,得到了高精度的车辆间相对定位结果。
适用GNSS的车辆在VSYR盲区定位误差修正方法.pdf
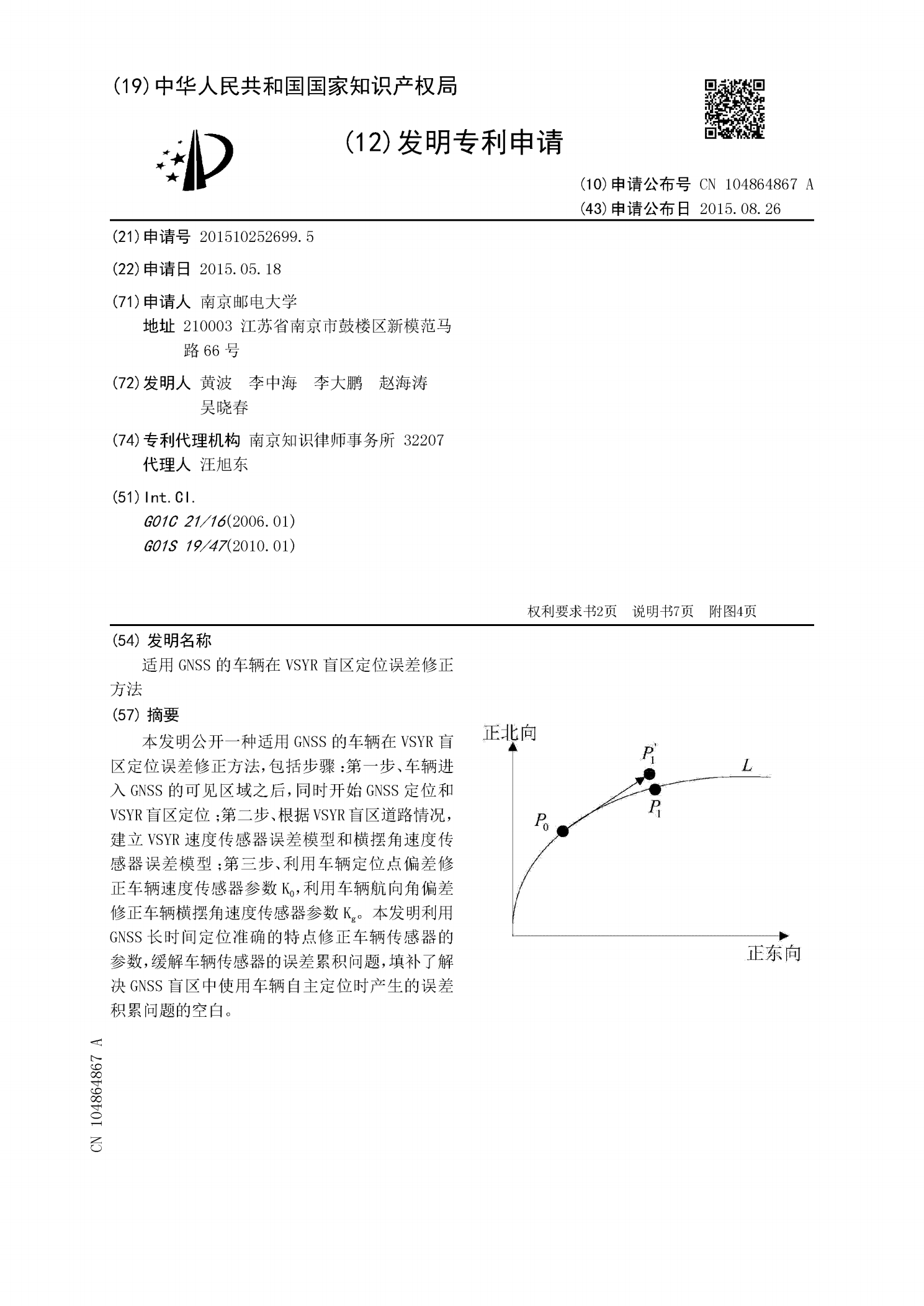
本发明公开一种适用GNSS的车辆在VSYR盲区定位误差修正方法,包括步骤:第一步、车辆进入GNSS的可见区域之后,同时开始GNSS定位和VSYR盲区定位;第二步、根据VSYR盲区道路情况,建立VSYR速度传感器误差模型和横摆角速度传感器误差模型;第三步、利用车辆定位点偏差修正车辆速度传感器参数K

减小GNSS导航定位误差的卫星方法──GNSS导航定位误差之六.pptx
,目录PartOnePartTwo轨道参数优化卫星轨道控制轨道调整策略轨道优化算法PartThree信号发射功率增强信号接收灵敏度提升信号处理算法优化信号抗干扰技术PartFour频率规划与分配频率复用技术频率分集技术频率自适应调整PartFive导航算法优化数据融合技术多频段导航技术实时动态差分技术PartSix抗干扰信号处理算法优化抗干扰接收机设计抗干扰天线技术抗干扰频谱管理策略THANKS