
一种柔性单元及柔性手腕.pdf

猫巷****奕声


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种柔性单元及柔性手腕.pdf
本发明公开了一种柔性单元,包括长条状的柔性本体,该柔性本体内具有沿柔性本体长度方向间隔层叠的一头限位件、多个中限位件和一尾限位件;靠近头限位件的中限位件的一侧内凹形成第一盲孔,靠近尾限位件的中限位件的另一侧凸起形成的第一限位部;相邻两个中限位件中的其中一个中限位件的第一限位部伸入另外一个中限位件的第一盲孔内;靠近中限位件的头限位件的侧部凸起形成第二限位部,该第二限位部伸入与头限位件相邻的中限位件的第一盲孔内;靠近中限位件的尾限位件的侧部内凹形成第二盲孔,与尾限位件相邻的中限位件的第一限位部伸入第二盲孔内,
一种机器人用柔性手腕.pdf
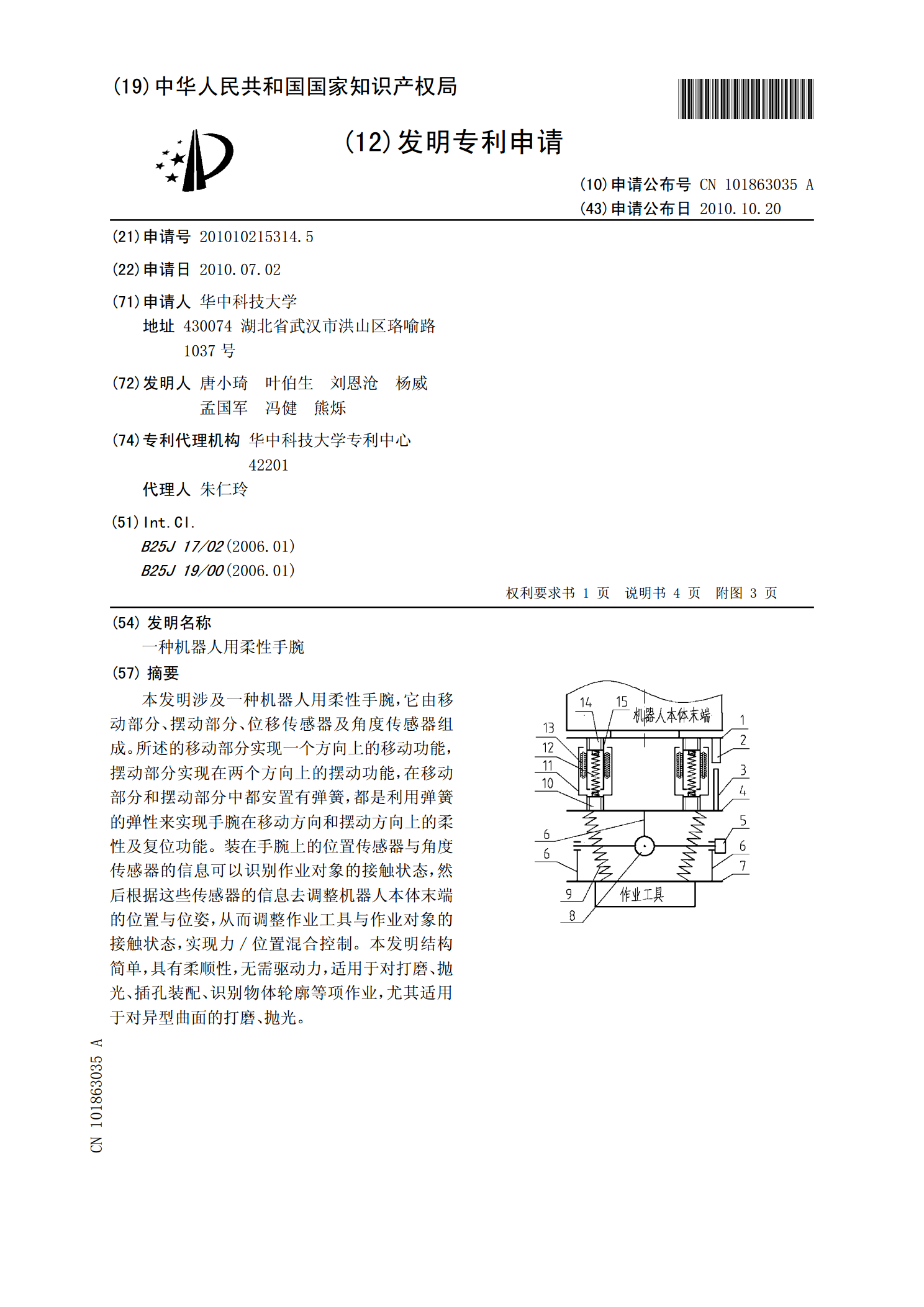
本发明涉及一种机器人用柔性手腕,它由移动部分、摆动部分、位移传感器及角度传感器组成。所述的移动部分实现一个方向上的移动功能,摆动部分实现在两个方向上的摆动功能,在移动部分和摆动部分中都安置有弹簧,都是利用弹簧的弹性来实现手腕在移动方向和摆动方向上的柔性及复位功能。装在手腕上的位置传感器与角度传感器的信息可以识别作业对象的接触状态,然后根据这些传感器的信息去调整机器人本体末端的位置与位姿,从而调整作业工具与作业对象的接触状态,实现力/位置混合控制。本发明结构简单,具有柔顺性,无需驱动力,适用于对打磨、抛光、
球齿轮及柔性手腕动画.ppt
下页柔性手腕机构基于球齿轮传动的机器人柔性手腕机构球齿轮齿盘机构
仿真机器人手腕柔性结构.pdf
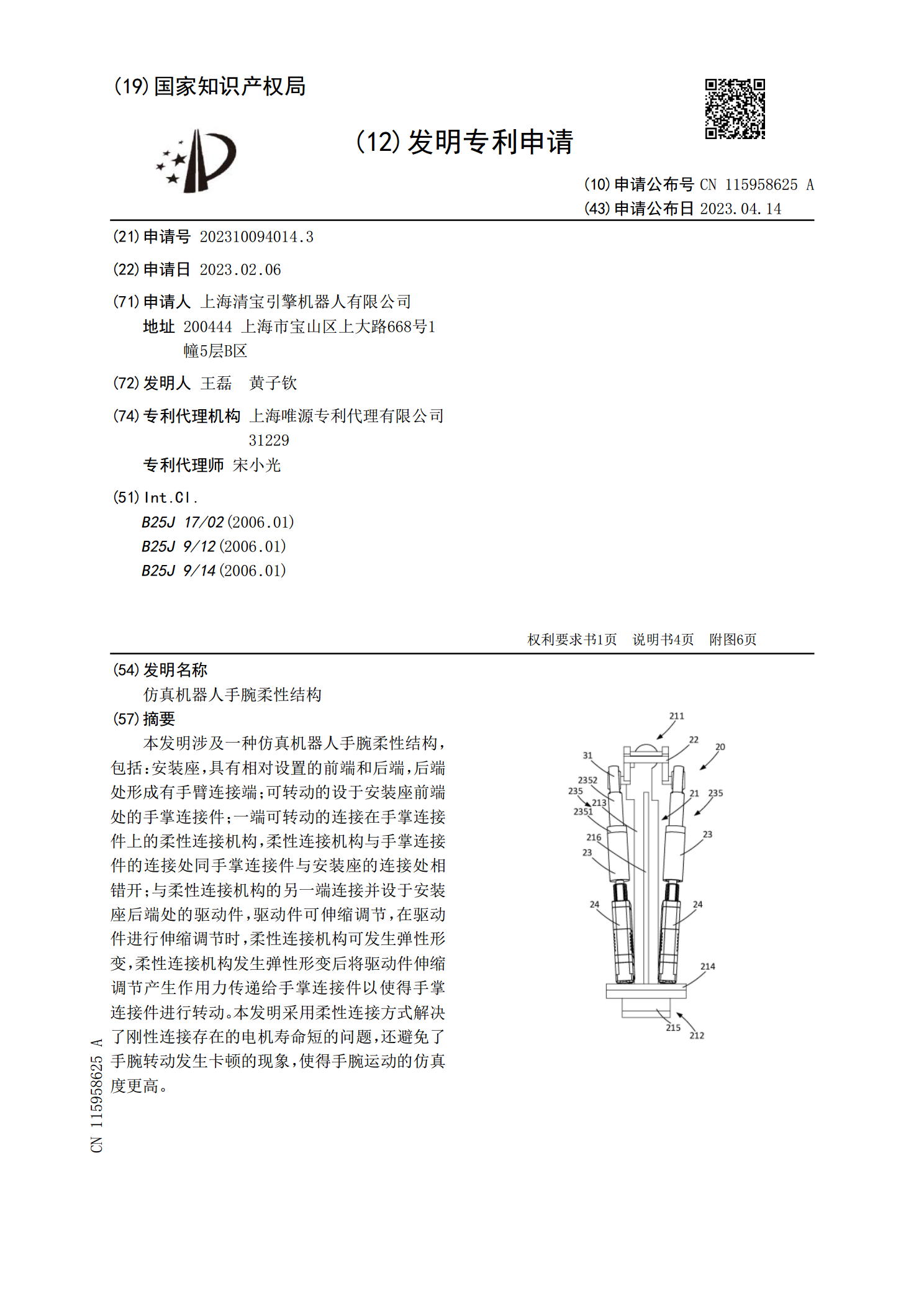
本发明涉及一种仿真机器人手腕柔性结构,包括:安装座,具有相对设置的前端和后端,后端处形成有手臂连接端;可转动的设于安装座前端处的手掌连接件;一端可转动的连接在手掌连接件上的柔性连接机构,柔性连接机构与手掌连接件的连接处同手掌连接件与安装座的连接处相错开;与柔性连接机构的另一端连接并设于安装座后端处的驱动件,驱动件可伸缩调节,在驱动件进行伸缩调节时,柔性连接机构可发生弹性形变,柔性连接机构发生弹性形变后将驱动件伸缩调节产生作用力传递给手掌连接件以使得手掌连接件进行转动。本发明采用柔性连接方式解决了刚性连接存

一种柔性支撑单元.pdf
本实用新型涉及一种柔性支撑单元,包括固定支座、气缸、底座、第一石墨衬套、转动连杆、支撑支座、偏心轴、滚动轴承及第二石墨衬套,底座设在固定支座上方,支撑支座设在底座上方,气缸固定在固定支座上,气缸伸出活塞杆,且活塞杆通过转轴及设在转轴上的第一石墨衬套与转动连杆的一端连接,转动连杆另一端与设在支撑支座上的偏心轴及设在偏心轴上的第二石墨衬套相连,滚动轴承连接在偏心轴上;气缸上活塞杆的直线往复运动带动转动连杆转动,转动连杆带动偏心轴相对于轴心来回转动,与偏心轴连接的滚动轴承最为支撑接触件在运动过程实现与平板的接触