
一种机器人用柔性手腕.pdf

宛菡****魔王


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人用柔性手腕.pdf
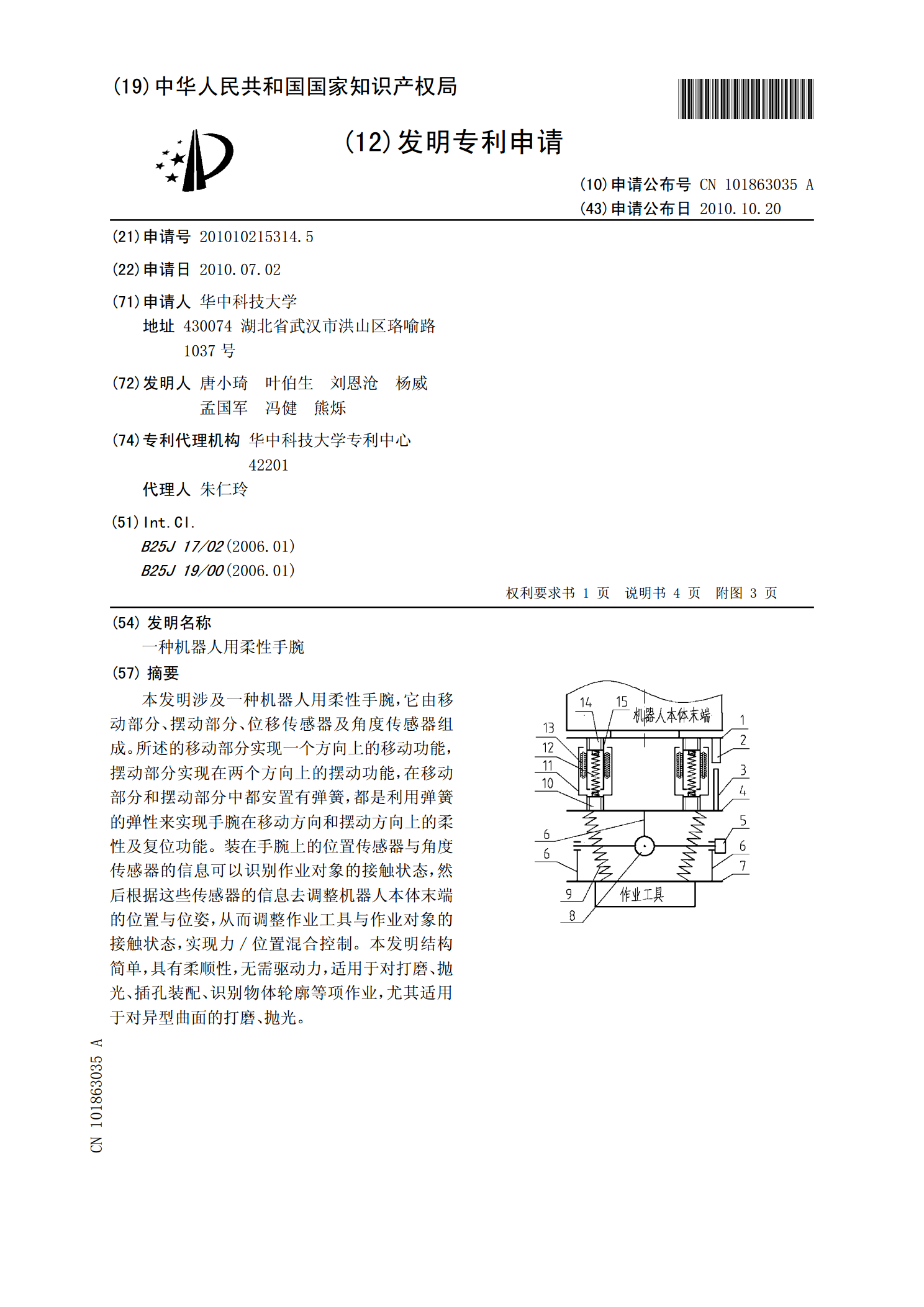
本发明涉及一种机器人用柔性手腕,它由移动部分、摆动部分、位移传感器及角度传感器组成。所述的移动部分实现一个方向上的移动功能,摆动部分实现在两个方向上的摆动功能,在移动部分和摆动部分中都安置有弹簧,都是利用弹簧的弹性来实现手腕在移动方向和摆动方向上的柔性及复位功能。装在手腕上的位置传感器与角度传感器的信息可以识别作业对象的接触状态,然后根据这些传感器的信息去调整机器人本体末端的位置与位姿,从而调整作业工具与作业对象的接触状态,实现力/位置混合控制。本发明结构简单,具有柔顺性,无需驱动力,适用于对打磨、抛光、
仿真机器人手腕柔性结构.pdf
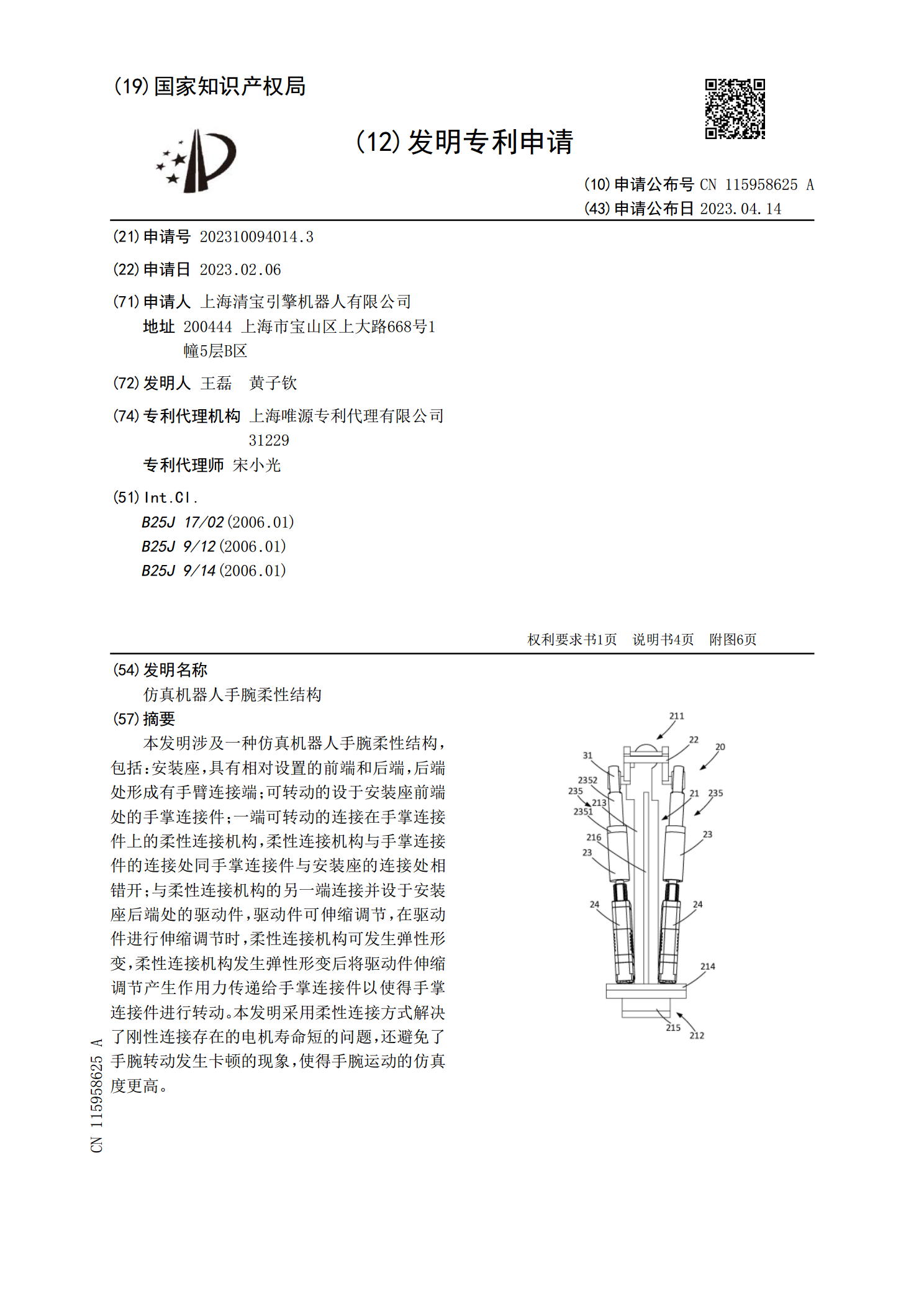
本发明涉及一种仿真机器人手腕柔性结构,包括:安装座,具有相对设置的前端和后端,后端处形成有手臂连接端;可转动的设于安装座前端处的手掌连接件;一端可转动的连接在手掌连接件上的柔性连接机构,柔性连接机构与手掌连接件的连接处同手掌连接件与安装座的连接处相错开;与柔性连接机构的另一端连接并设于安装座后端处的驱动件,驱动件可伸缩调节,在驱动件进行伸缩调节时,柔性连接机构可发生弹性形变,柔性连接机构发生弹性形变后将驱动件伸缩调节产生作用力传递给手掌连接件以使得手掌连接件进行转动。本发明采用柔性连接方式解决了刚性连接存

一种柔性单元及柔性手腕.pdf
本发明公开了一种柔性单元,包括长条状的柔性本体,该柔性本体内具有沿柔性本体长度方向间隔层叠的一头限位件、多个中限位件和一尾限位件;靠近头限位件的中限位件的一侧内凹形成第一盲孔,靠近尾限位件的中限位件的另一侧凸起形成的第一限位部;相邻两个中限位件中的其中一个中限位件的第一限位部伸入另外一个中限位件的第一盲孔内;靠近中限位件的头限位件的侧部凸起形成第二限位部,该第二限位部伸入与头限位件相邻的中限位件的第一盲孔内;靠近中限位件的尾限位件的侧部内凹形成第二盲孔,与尾限位件相邻的中限位件的第一限位部伸入第二盲孔内,

一种工业用机器人手腕.pdf
本发明公开了一种工业用机器人手腕,包括手腕体和手腕连接体,所述手腕体和手腕连接体之间通过轴承相连定位,所述手腕体和手腕连接体之间配合处形成有间隙迷宫结构,所述间隙迷宫结构位于轴承的外侧。该工业用机器人手腕结构设计合理,依靠油封及间隙迷宫密封结构实现机器人手腕部位的双层密封,显著的提高机器人手腕的防护等级;同时,由于油封与轴承几乎处于同一安装面,不会增加机器人手腕宽度,不仅保证机器人手腕的刚性,也能使得机器人手腕部位的尺寸更加紧凑,满足更多的应用领域;密封性能优越,降低机器人手腕的维护成本,提高机器人的使用

一种工业机器人用柔性电缆.pdf
本发明涉及柔性电缆技术领域,具体的说是一种工业机器人用柔性电缆,包括:若干个联结器,若干个联结器之间相互铰接,所述联结器的内部设置有均匀分布的电缆本体;若干个安装结构,所述安装结构设置于联结器的内侧,且用于电缆本体的安装;其中,所述电缆本体包括设置于安装结构内侧的护套;通过设置安装结构和电缆本体,能够将电缆本体通过安装块和安装槽固定电缆本体的位置,在使用过程中柔性电缆与缓冲气囊相接触,减少了与联结器内壁之间的触碰磨损,进而降低了电缆本体的老化磨损速度,同时在安装结构的作用下能够对电缆本体之间相互分离单独排