
仿真机器人手腕柔性结构.pdf

猫巷****傲柏

1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
仿真机器人手腕柔性结构.pdf
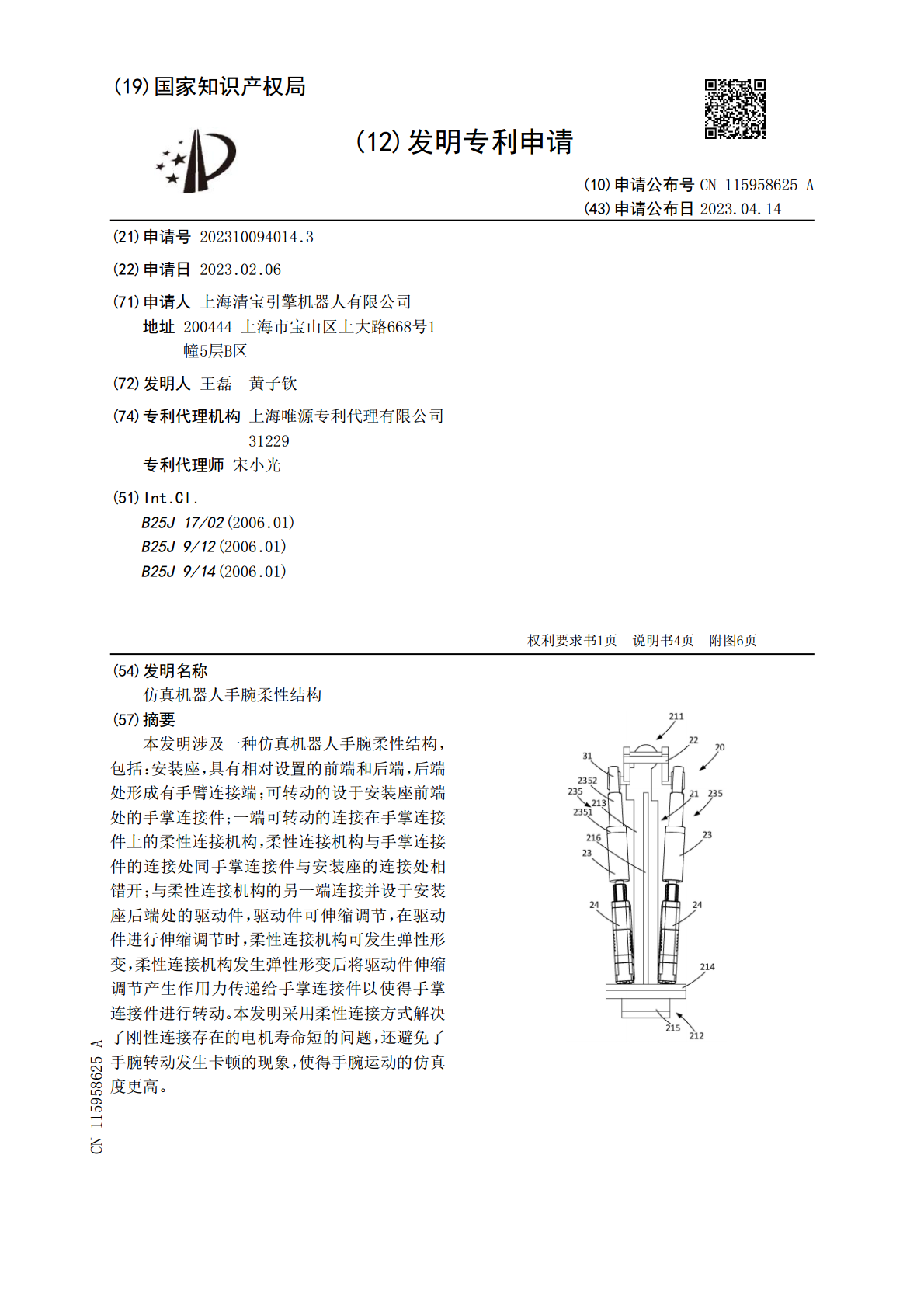
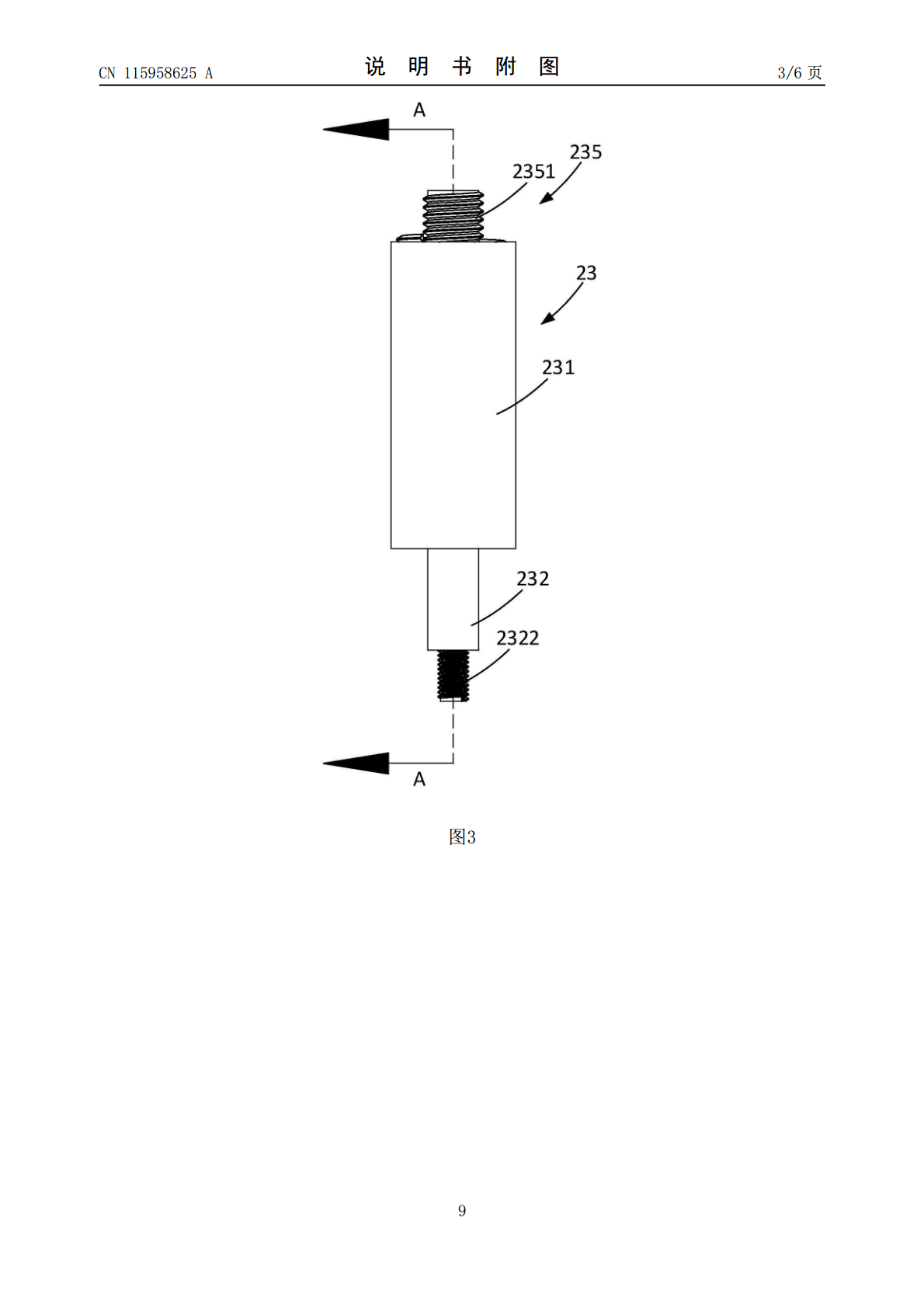
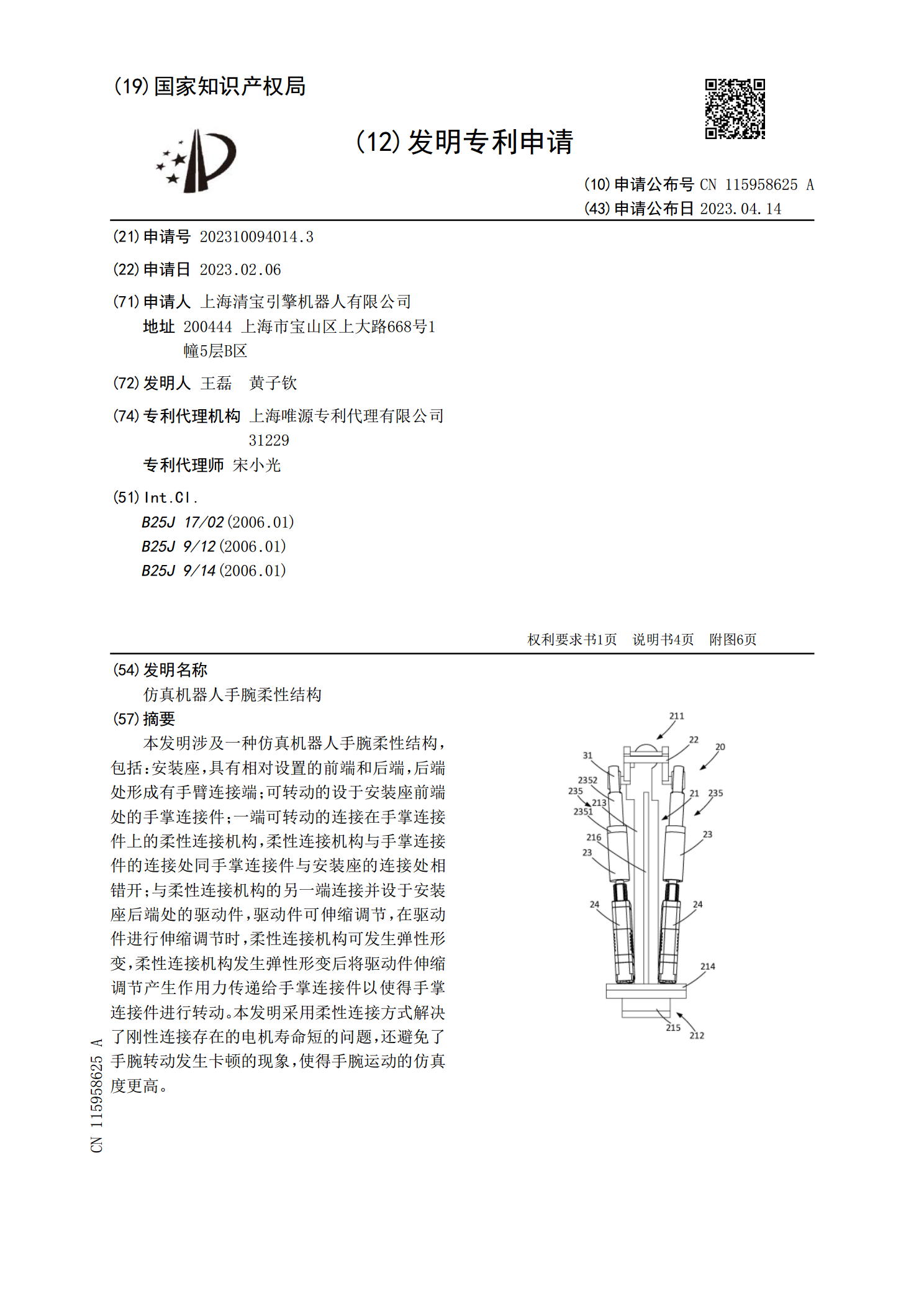
本发明涉及一种仿真机器人手腕柔性结构,包括:安装座,具有相对设置的前端和后端,后端处形成有手臂连接端;可转动的设于安装座前端处的手掌连接件;一端可转动的连接在手掌连接件上的柔性连接机构,柔性连接机构与手掌连接件的连接处同手掌连接件与安装座的连接处相错开;与柔性连接机构的另一端连接并设于安装座后端处的驱动件,驱动件可伸缩调节,在驱动件进行伸缩调节时,柔性连接机构可发生弹性形变,柔性连接机构发生弹性形变后将驱动件伸缩调节产生作用力传递给手掌连接件以使得手掌连接件进行转动。本发明采用柔性连接方式解决了刚性连接存

船舶维护水下柔性机器人结构与仿真研究.doc
船舶维护水下柔性机器人结构与仿真研究随着国际上船舶业的发展,水下机器人朝着船舶航行过程中所配套的检测设备发展,是快速检测船体的重要手段之一,具有举足轻重的作用。自治水下机器人(AUV)的应用前景非常广阔,浅水观察级AUV的研究对于我国浅水水域检测与探索具有重大意义。针对目前船舶航行中维护检测方面的需要,结合国内外AUV的设计方法,本论文开发了一种柔性结构水下机器人。该机器人能实现小范围快速转弯、动作灵活,抗疲劳性能好等功能,为船舶的快速维护检测提供有力保障,有效防止船体故障的进一步恶化。在研究了国内外AU

船舶维护水下柔性机器人结构与仿真研究.doc
船舶维护水下柔性机器人结构与仿真研究随着国际上船舶业的发展,水下机器人朝着船舶航行过程中所配套的检测设备发展,是快速检测船体的重要手段之一,具有举足轻重的作用。自治水下机器人(AUV)的应用前景非常广阔,浅水观察级AUV的研究对于我国浅水水域检测与探索具有重大意义。针对目前船舶航行中维护检测方面的需要,结合国内外AUV的设计方法,本论文开发了一种柔性结构水下机器人。该机器人能实现小范围快速转弯、动作灵活,抗疲劳性能好等功能,为船舶的快速维护检测提供有力保障,有效防止船体故障的进一步恶化。在研究了国内外AU
一种机器人用柔性手腕.pdf
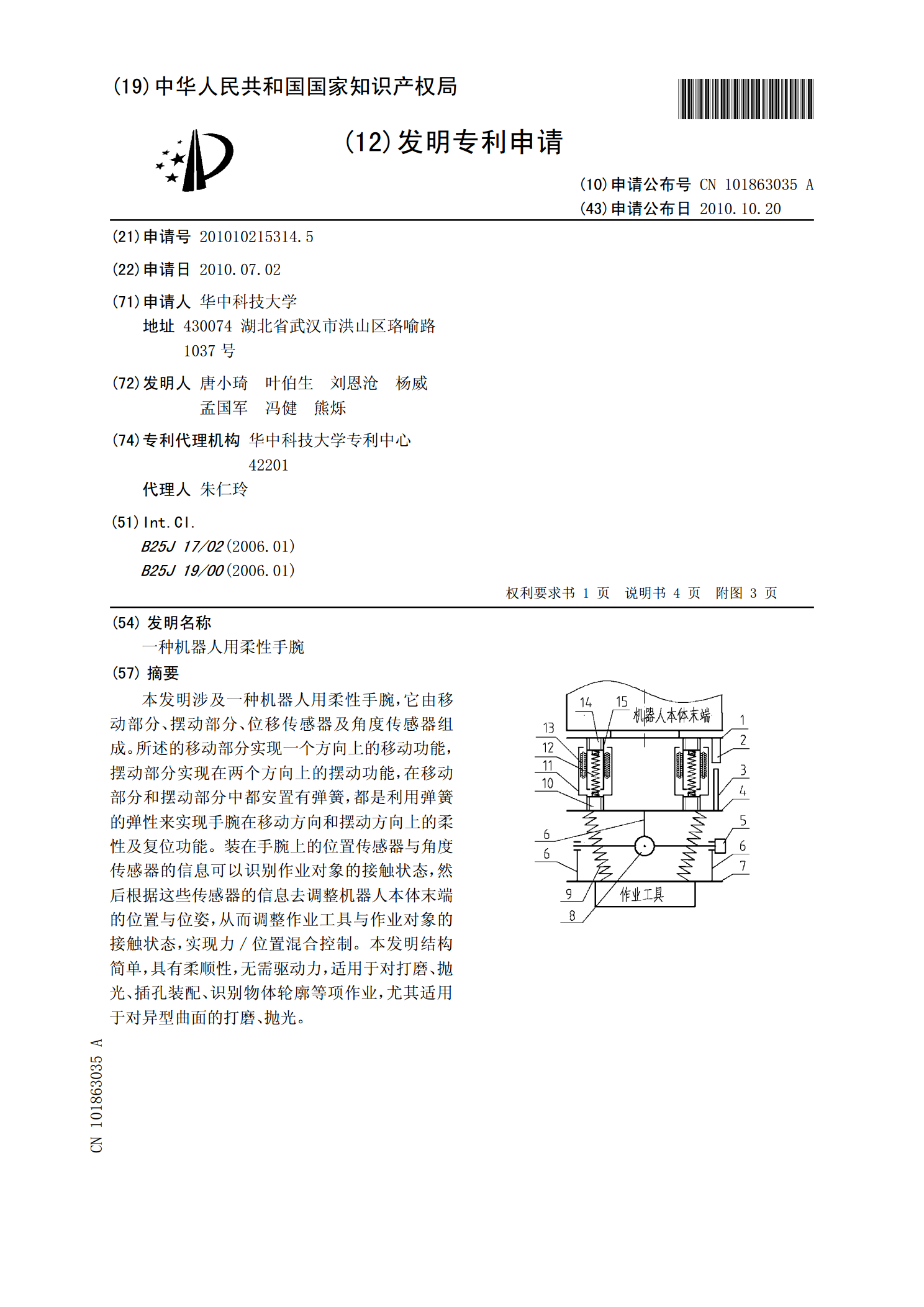
本发明涉及一种机器人用柔性手腕,它由移动部分、摆动部分、位移传感器及角度传感器组成。所述的移动部分实现一个方向上的移动功能,摆动部分实现在两个方向上的摆动功能,在移动部分和摆动部分中都安置有弹簧,都是利用弹簧的弹性来实现手腕在移动方向和摆动方向上的柔性及复位功能。装在手腕上的位置传感器与角度传感器的信息可以识别作业对象的接触状态,然后根据这些传感器的信息去调整机器人本体末端的位置与位姿,从而调整作业工具与作业对象的接触状态,实现力/位置混合控制。本发明结构简单,具有柔顺性,无需驱动力,适用于对打磨、抛光、

机器人手腕结构及机器人.pdf
本公开涉及一种机器人手腕结构及机器人,该机器人手腕结构包括壳体、第一电机、第二电机、第一传动机构、第二传动机构、第一主动锥齿轮、第二主动锥齿轮、从动锥齿轮、保持架、以及输出连接件,第一电机和第二电机安装在壳体上,第一主动锥齿轮、第二主动锥齿轮和从动锥齿轮分别可转动地安装在保持架上,第一主动锥齿轮的轴线与第二主动锥齿轮的轴线共线且与从动锥齿轮的轴线垂直相交,第一主动锥齿轮和第二主动锥齿轮均与从动锥齿轮啮合,第一电机通过第一传动机构与第一主动锥齿轮相连,第二电机通过第二传动机构与第二主动锥齿轮相连,输出连接件