
一种机器人自动避障方法和装置.pdf

猫巷****志敏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人自动避障方法和装置.pdf
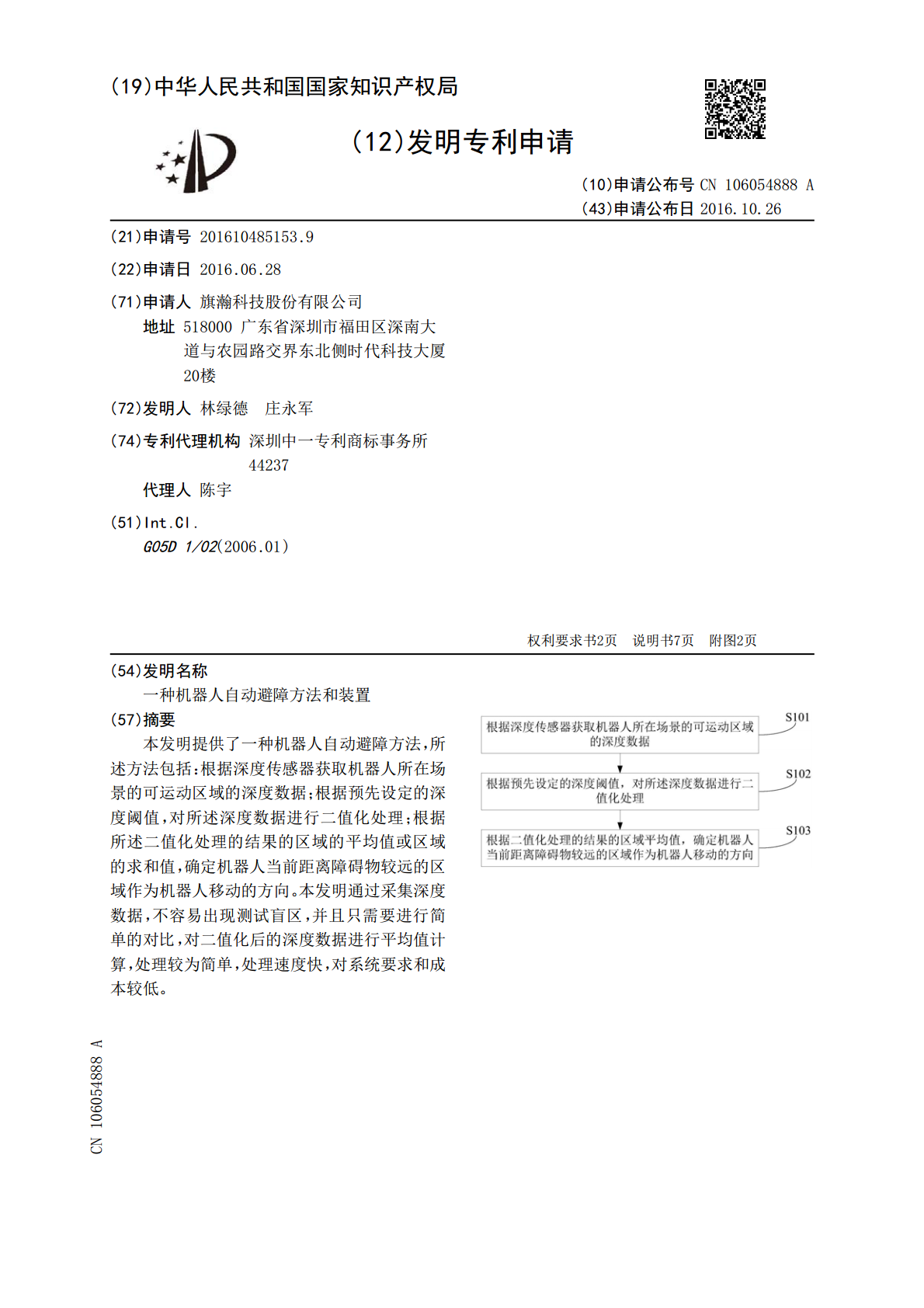
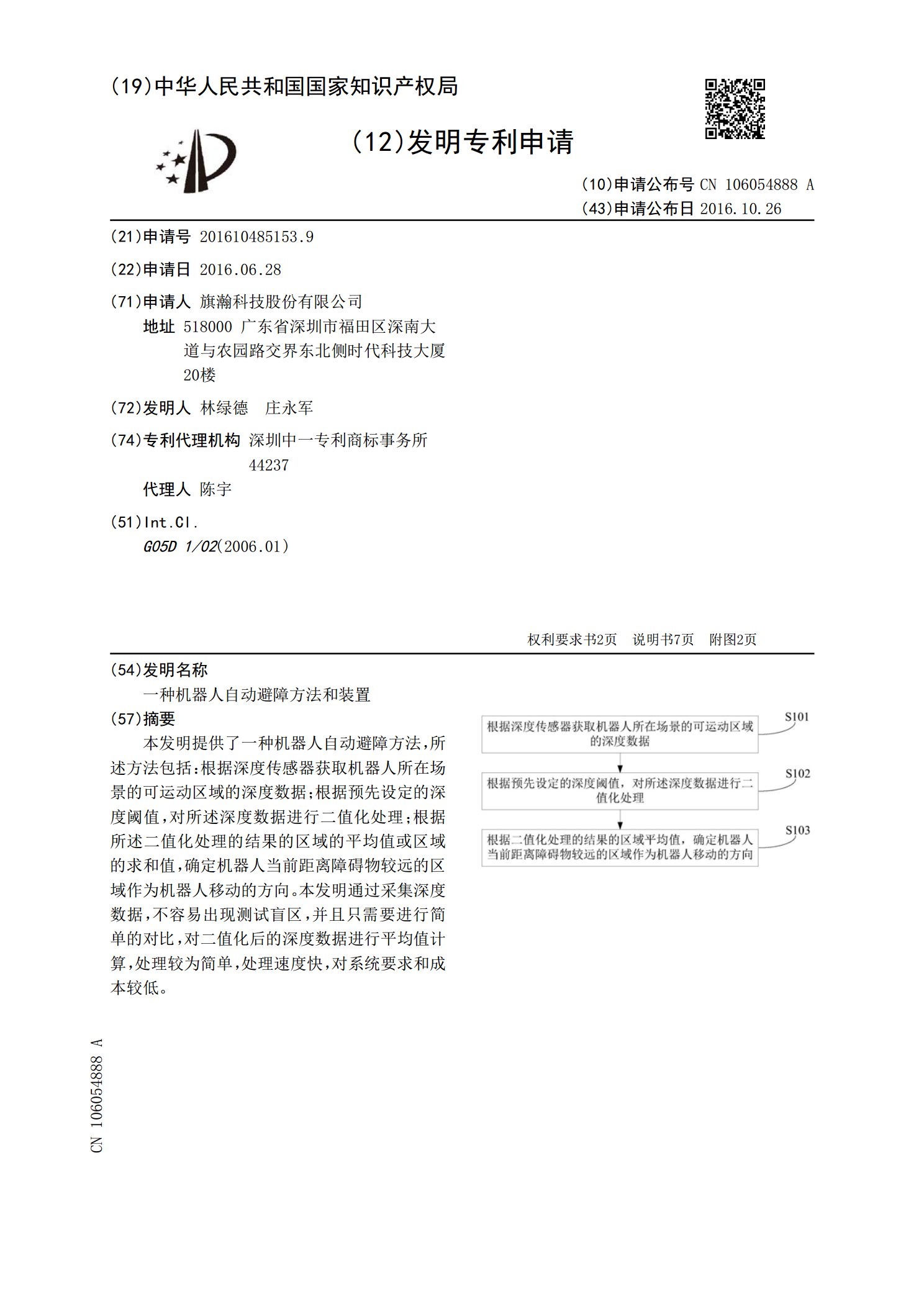
本发明提供了一种机器人自动避障方法,所述方法包括:根据深度传感器获取机器人所在场景的可运动区域的深度数据;根据预先设定的深度阈值,对所述深度数据进行二值化处理;根据所述二值化处理的结果的区域的平均值或区域的求和值,确定机器人当前距离障碍物较远的区域作为机器人移动的方向。本发明通过采集深度数据,不容易出现测试盲区,并且只需要进行简单的对比,对二值化后的深度数据进行平均值计算,处理较为简单,处理速度快,对系统要求和成本较低。
一种机器人避障方法、装置和机器人.pdf
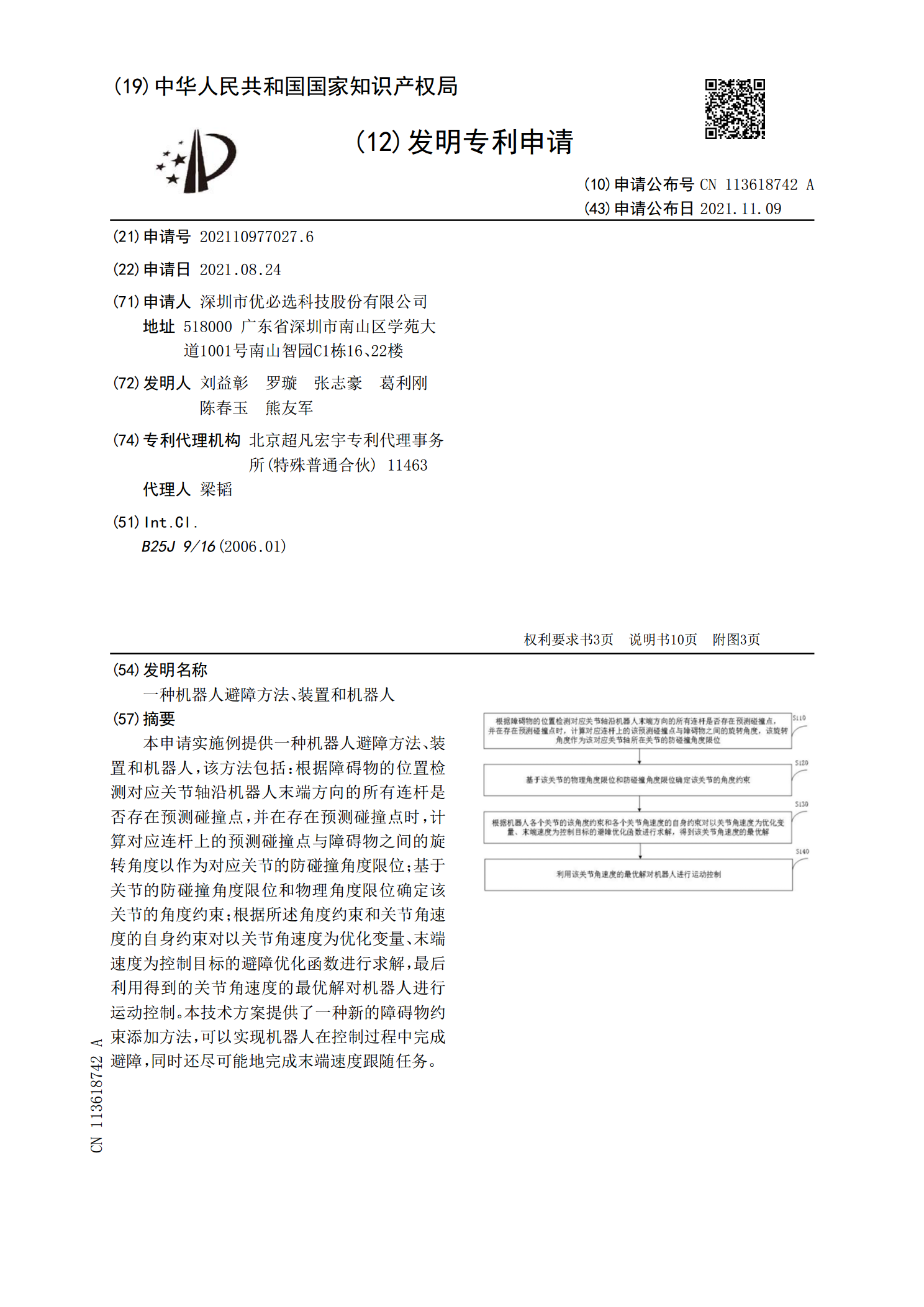
本申请实施例提供一种机器人避障方法、装置和机器人,该方法包括:根据障碍物的位置检测对应关节轴沿机器人末端方向的所有连杆是否存在预测碰撞点,并在存在预测碰撞点时,计算对应连杆上的预测碰撞点与障碍物之间的旋转角度以作为对应关节的防碰撞角度限位;基于关节的防碰撞角度限位和物理角度限位确定该关节的角度约束;根据所述角度约束和关节角速度的自身约束对以关节角速度为优化变量、末端速度为控制目标的避障优化函数进行求解,最后利用得到的关节角速度的最优解对机器人进行运动控制。本技术方案提供了一种新的障碍物约束添加方法,可以实
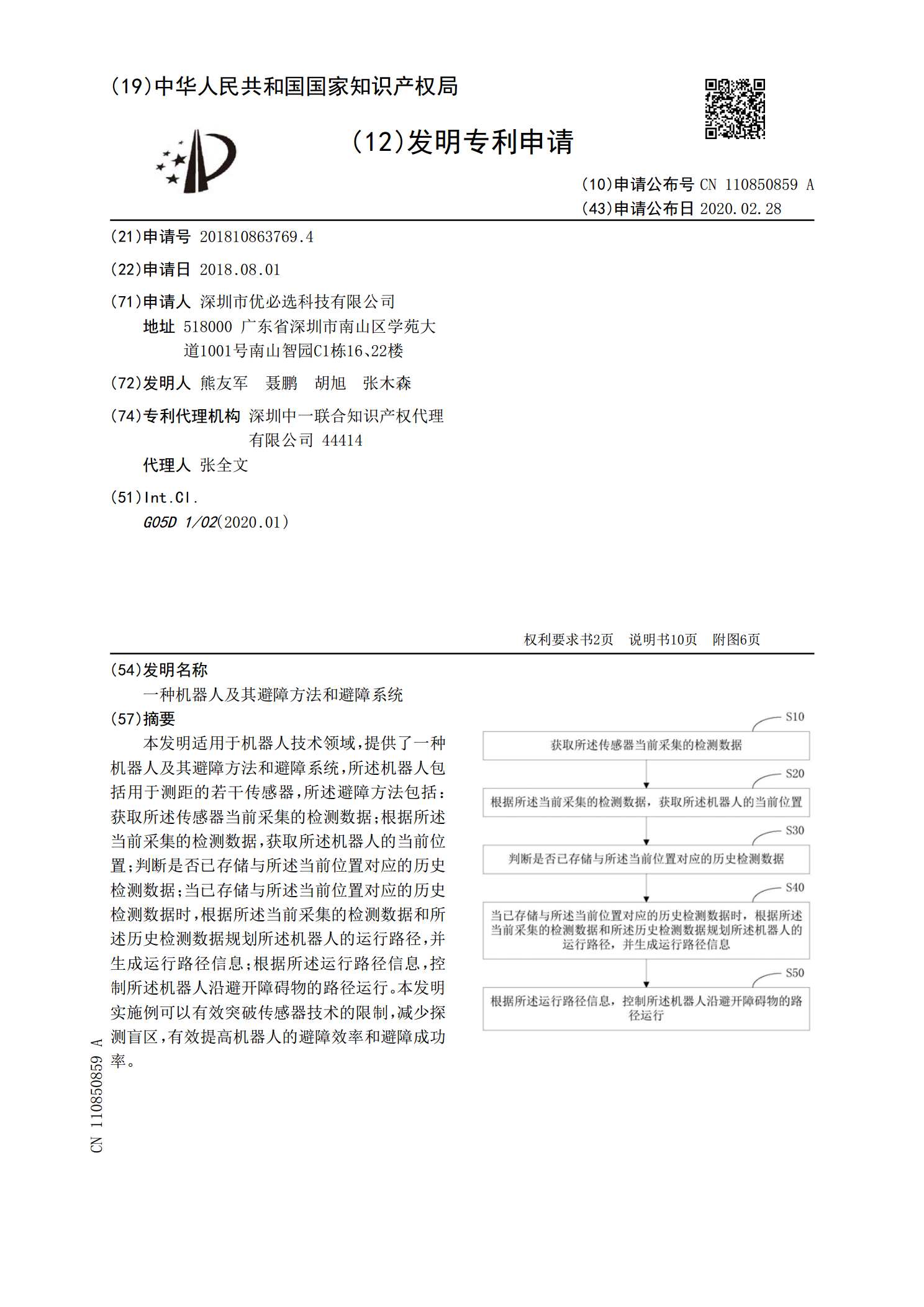
一种机器人及其避障方法和避障系统.pdf
本发明适用于机器人技术领域,提供了一种机器人及其避障方法和避障系统,所述机器人包括用于测距的若干传感器,所述避障方法包括:获取所述传感器当前采集的检测数据;根据所述当前采集的检测数据,获取所述机器人的当前位置;判断是否已存储与所述当前位置对应的历史检测数据;当已存储与所述当前位置对应的历史检测数据时,根据所述当前采集的检测数据和所述历史检测数据规划所述机器人的运行路径,并生成运行路径信息;根据所述运行路径信息,控制所述机器人沿避开障碍物的路径运行。本发明实施例可以有效突破传感器技术的限制,减少探测盲区,有
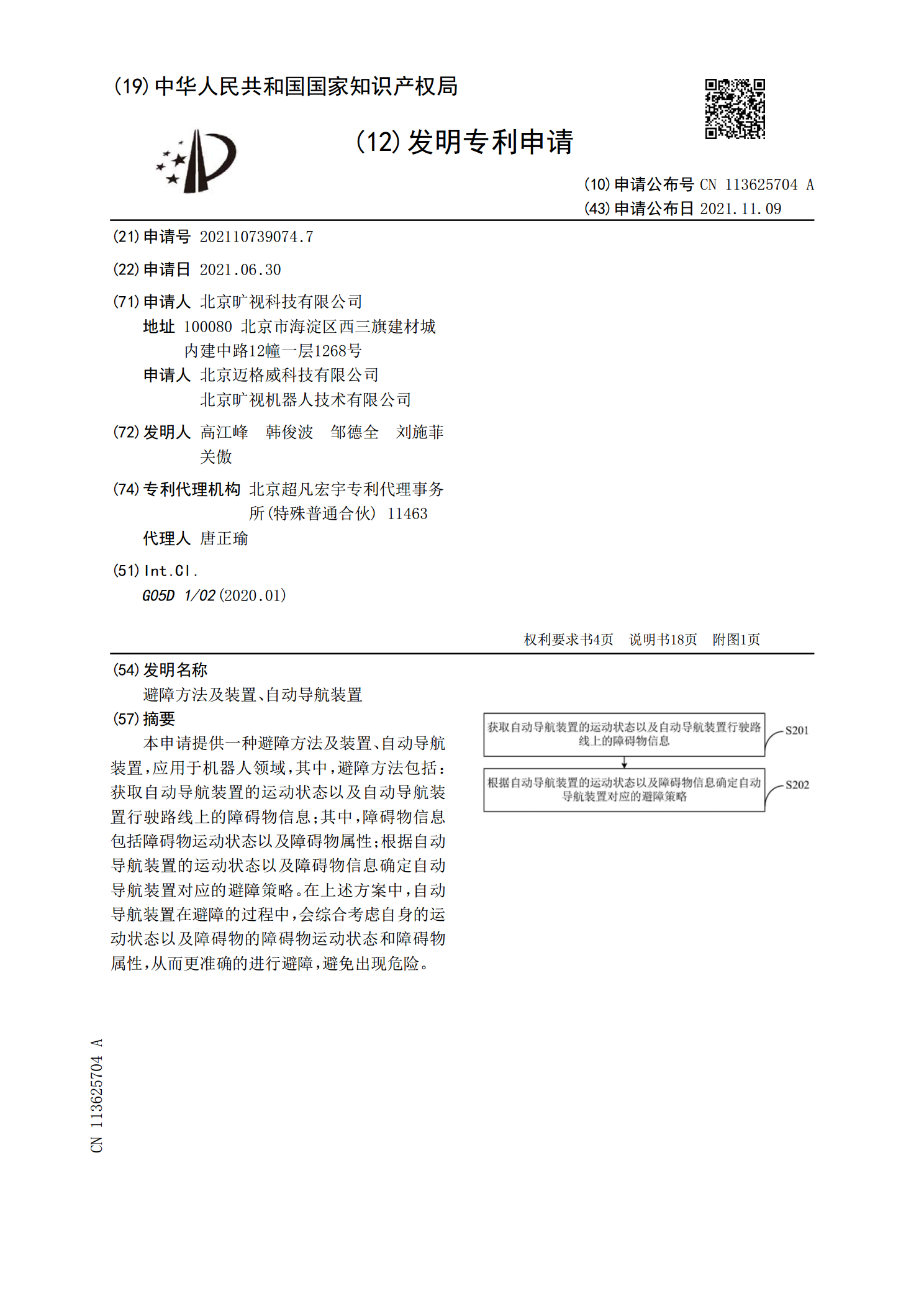
避障方法及装置、自动导航装置.pdf
本申请提供一种避障方法及装置、自动导航装置,应用于机器人领域,其中,避障方法包括:获取自动导航装置的运动状态以及自动导航装置行驶路线上的障碍物信息;其中,障碍物信息包括障碍物运动状态以及障碍物属性;根据自动导航装置的运动状态以及障碍物信息确定自动导航装置对应的避障策略。在上述方案中,自动导航装置在避障的过程中,会综合考虑自身的运动状态以及障碍物的障碍物运动状态和障碍物属性,从而更准确的进行避障,避免出现危险。
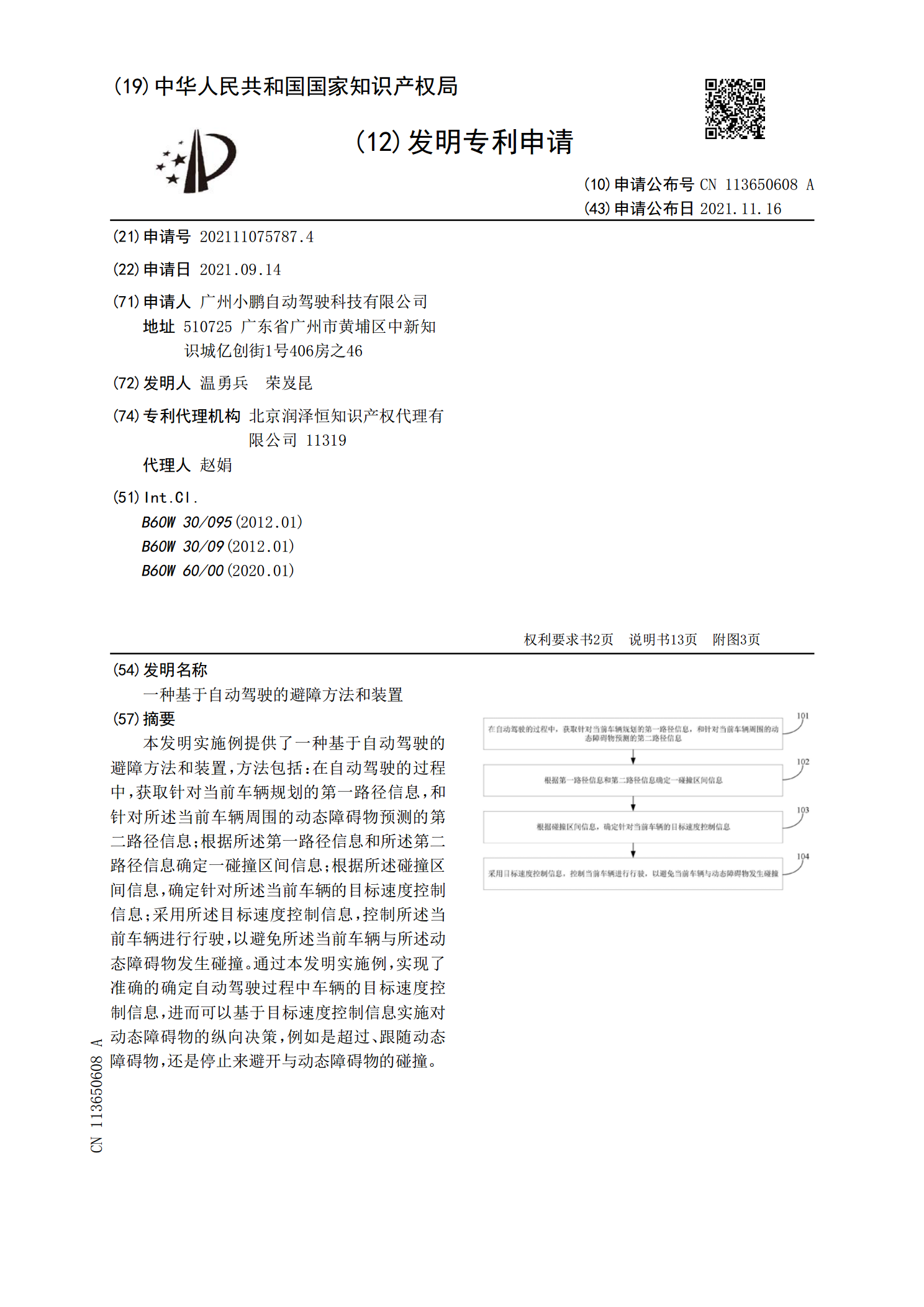
一种基于自动驾驶的避障方法和装置.pdf
本发明实施例提供了一种基于自动驾驶的避障方法和装置,方法包括:在自动驾驶的过程中,获取针对当前车辆规划的第一路径信息,和针对所述当前车辆周围的动态障碍物预测的第二路径信息;根据所述第一路径信息和所述第二路径信息确定一碰撞区间信息;根据所述碰撞区间信息,确定针对所述当前车辆的目标速度控制信息;采用所述目标速度控制信息,控制所述当前车辆进行行驶,以避免所述当前车辆与所述动态障碍物发生碰撞。通过本发明实施例,实现了准确的确定自动驾驶过程中车辆的目标速度控制信息,进而可以基于目标速度控制信息实施对动态障碍物的纵向