
一种机器人及其避障方法和避障系统.pdf

建英****66

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人及其避障方法和避障系统.pdf
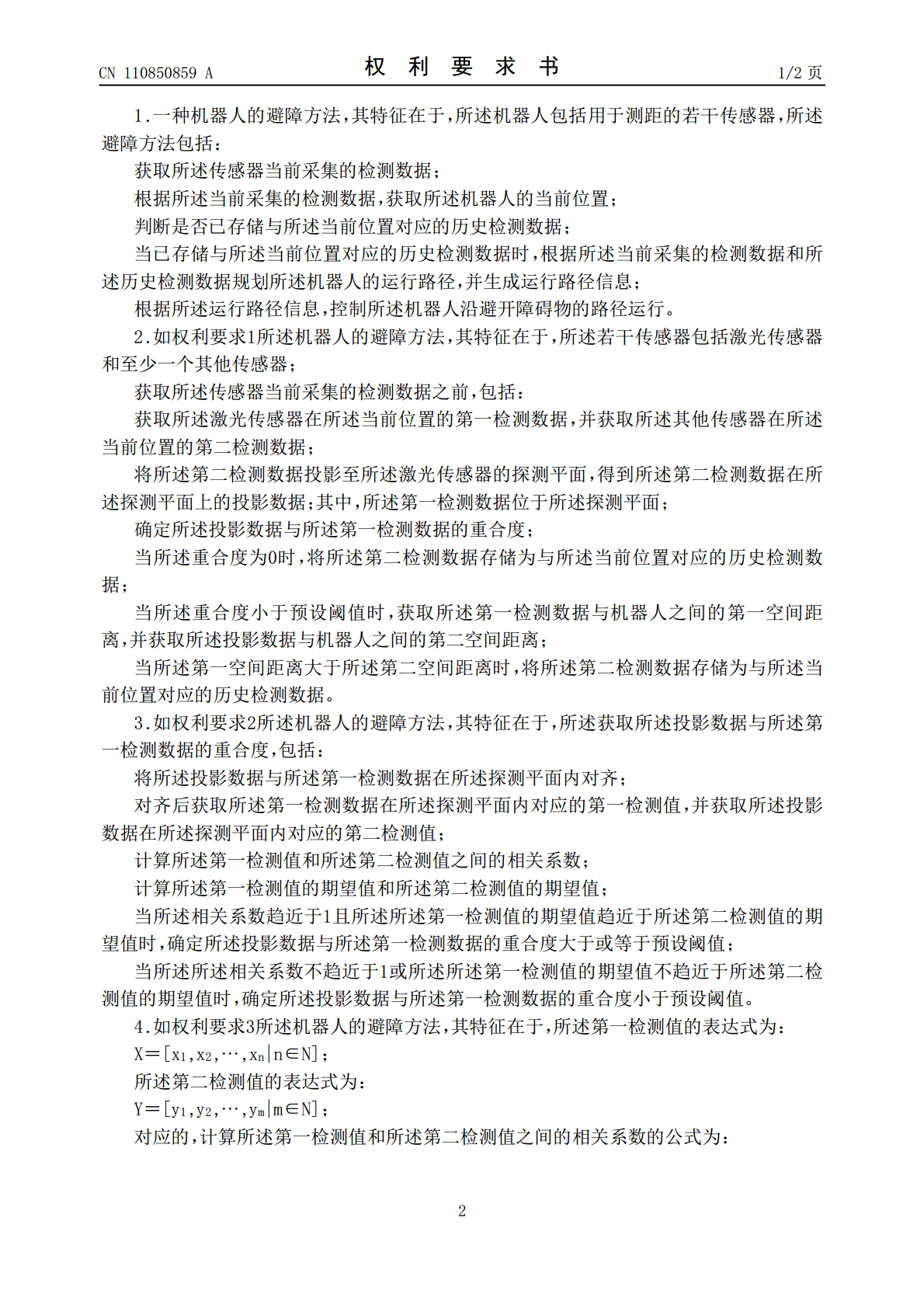
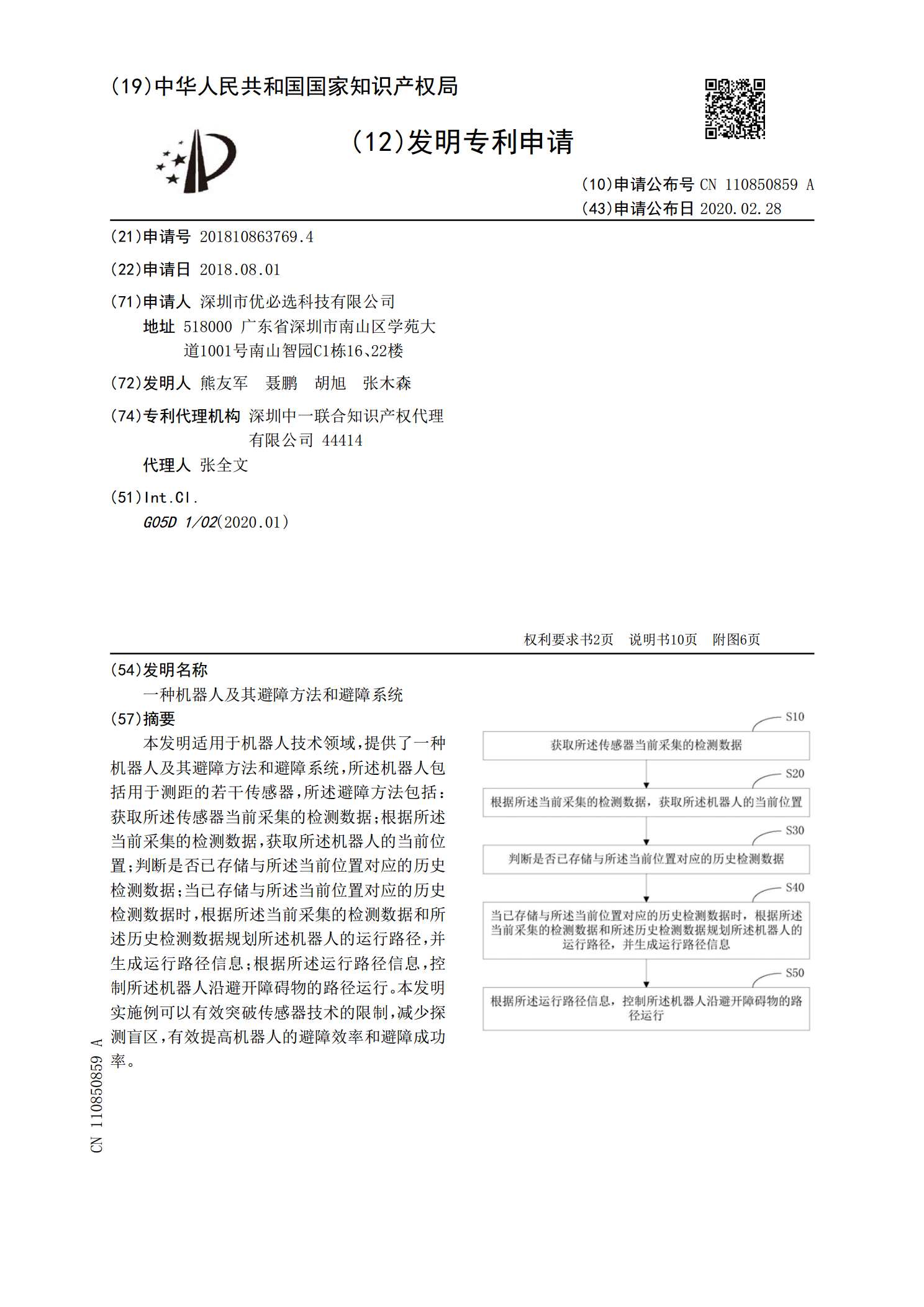
本发明适用于机器人技术领域,提供了一种机器人及其避障方法和避障系统,所述机器人包括用于测距的若干传感器,所述避障方法包括:获取所述传感器当前采集的检测数据;根据所述当前采集的检测数据,获取所述机器人的当前位置;判断是否已存储与所述当前位置对应的历史检测数据;当已存储与所述当前位置对应的历史检测数据时,根据所述当前采集的检测数据和所述历史检测数据规划所述机器人的运行路径,并生成运行路径信息;根据所述运行路径信息,控制所述机器人沿避开障碍物的路径运行。本发明实施例可以有效突破传感器技术的限制,减少探测盲区,有
一种避障系统及避障方法.pdf
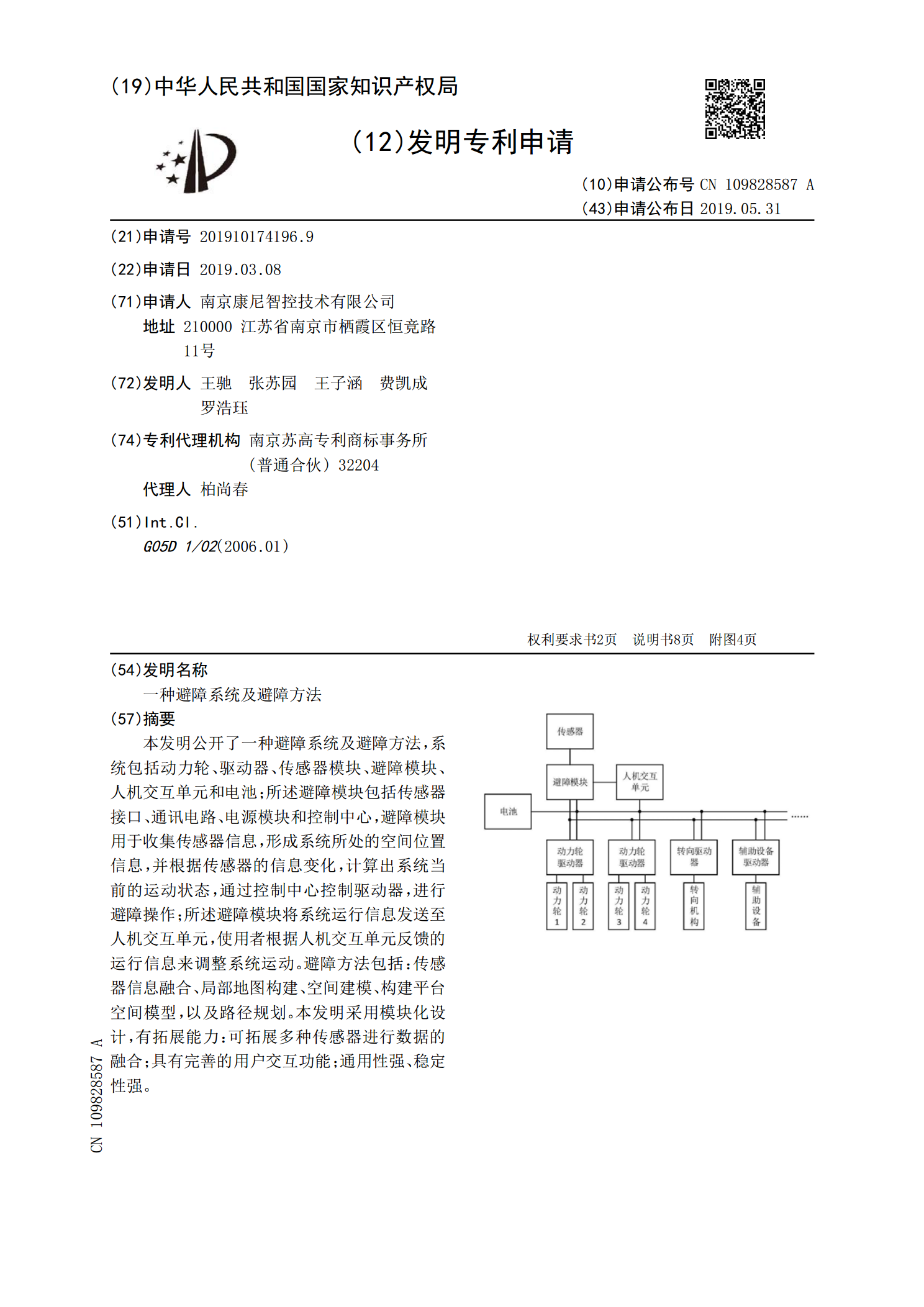
本发明公开了一种避障系统及避障方法,系统包括动力轮、驱动器、传感器模块、避障模块、人机交互单元和电池;所述避障模块包括传感器接口、通讯电路、电源模块和控制中心,避障模块用于收集传感器信息,形成系统所处的空间位置信息,并根据传感器的信息变化,计算出系统当前的运动状态,通过控制中心控制驱动器,进行避障操作;所述避障模块将系统运行信息发送至人机交互单元,使用者根据人机交互单元反馈的运行信息来调整系统运动。避障方法包括:传感器信息融合、局部地图构建、空间建模、构建平台空间模型,以及路径规划。本发明采用模块化设计,

一种站台门避障检测系统及其避障检测方法和应用.pdf
本发明涉及站台门避障装置技术领域,尤其是一种站台门避障检测系统及其避障检测方法和应用。本发明适用于轨道交通,使用3D结构光深度摄像头来检测上行区站台门轨道侧或下行区站台门轨道侧的滞留物体,3D结构光深度摄像头使用940nm波段,不惧黑暗环境或轨道车辆的车灯闪照,同时具有ClassI级人眼友好功能,始终保证摄像区域内的立体全覆盖,在检测的同时防止探测器误报,多设备间不会存在干扰,调试简单,从而保证乘客安全和正常的运营效率。
机械臂的避障方法及避障系统.pdf
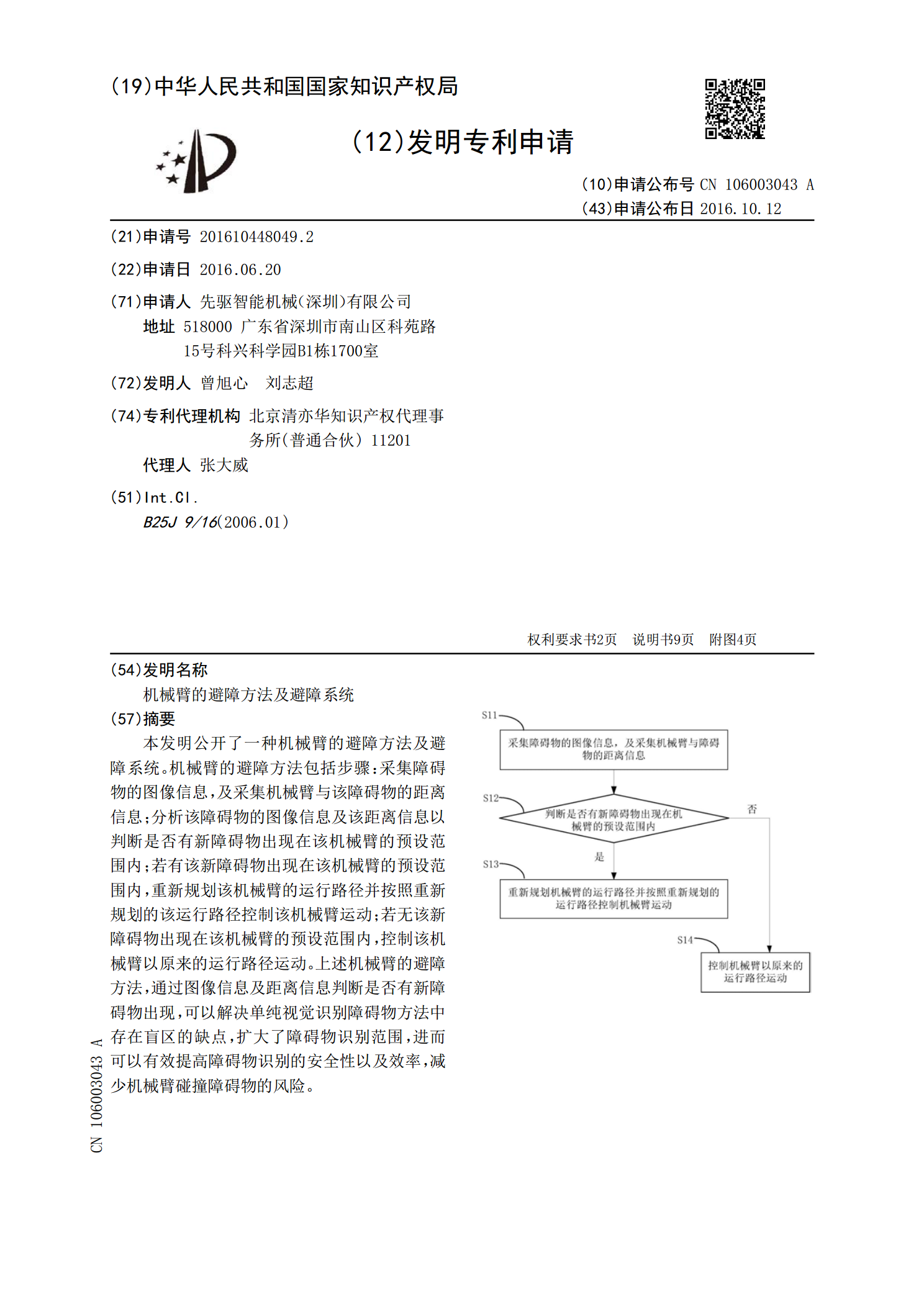
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点
一种盲人避障装置及其避障提示方法.pdf
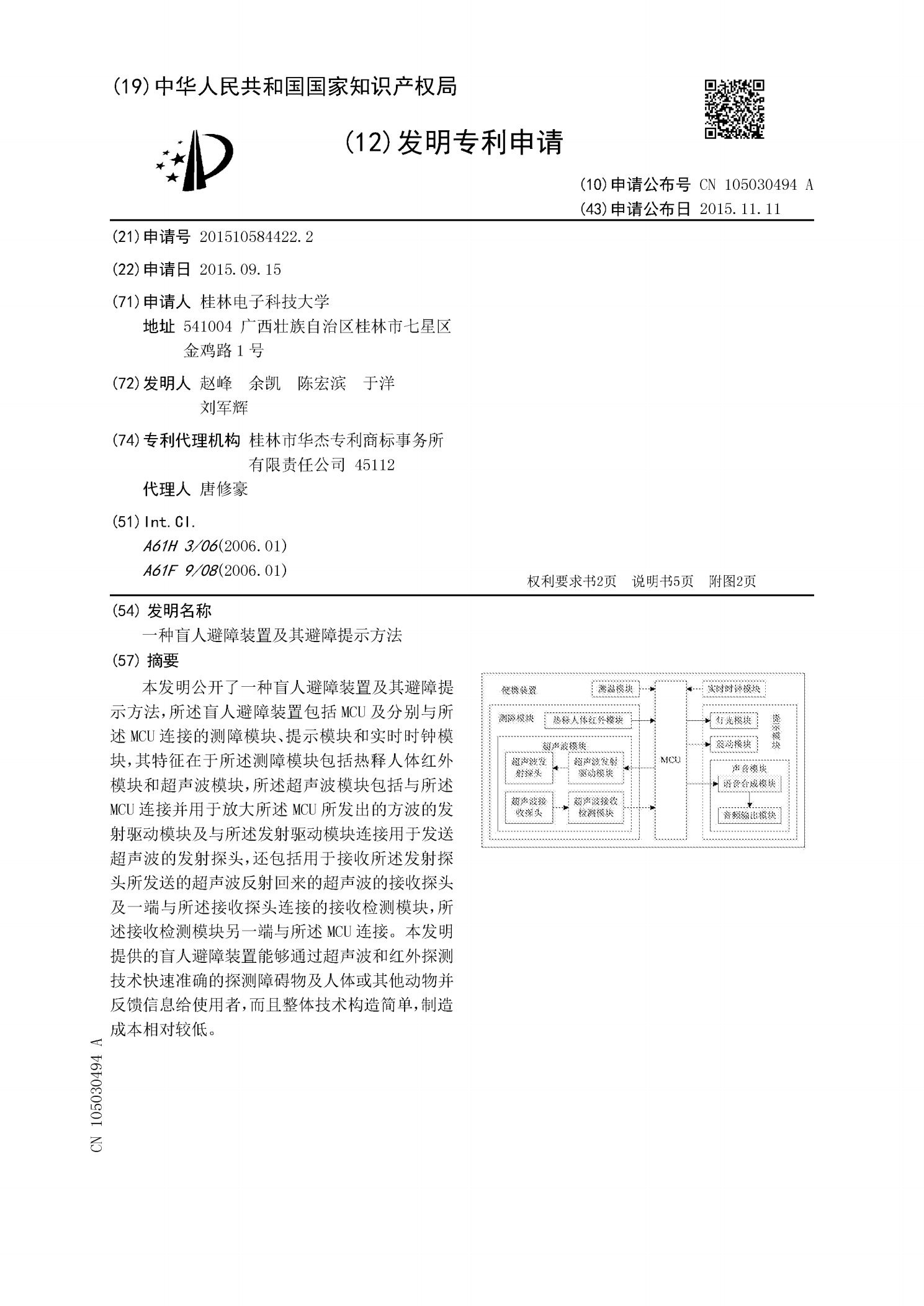
本发明公开了一种盲人避障装置及其避障提示方法,所述盲人避障装置包括MCU及分别与所述MCU连接的测障模块、提示模块和实时时钟模块,其特征在于所述测障模块包括热释人体红外模块和超声波模块,所述超声波模块包括与所述MCU连接并用于放大所述MCU所发出的方波的发射驱动模块及与所述发射驱动模块连接用于发送超声波的发射探头,还包括用于接收所述发射探头所发送的超声波反射回来的超声波的接收探头及一端与所述接收探头连接的接收检测模块,所述接收检测模块另一端与所述MCU连接。本发明提供的盲人避障装置能够通过超声波和红外探测