
一种汽车大灯随动转向方法.pdf

是飞****文章

1/4

2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种汽车大灯随动转向方法.pdf
本发明公开了一种汽车大灯随动转向方法,(1)转动方向盘,末端磁铁根据一定的传动比跟随转动,使角度传感器感应到相应的信号;(2)通过AD转换电路把角度传感器产生的信号输入到主机;(3)主机把输入的角度信号,根据不同的模拟速度,通过运算得出舵机的控制转角值,并通过LIN总线送到左、右从机;(4)左、右从机分别识别到信号ID,并得到不同的转角值,输出特定的脉宽,控制舵机;(5)光电开关识别到周围环境的明暗情况,判定是否打开前照灯;(6)由按钮模拟不同的速度环境,使舵机在不同的速度下有不同的转角。本发明的汽车大灯
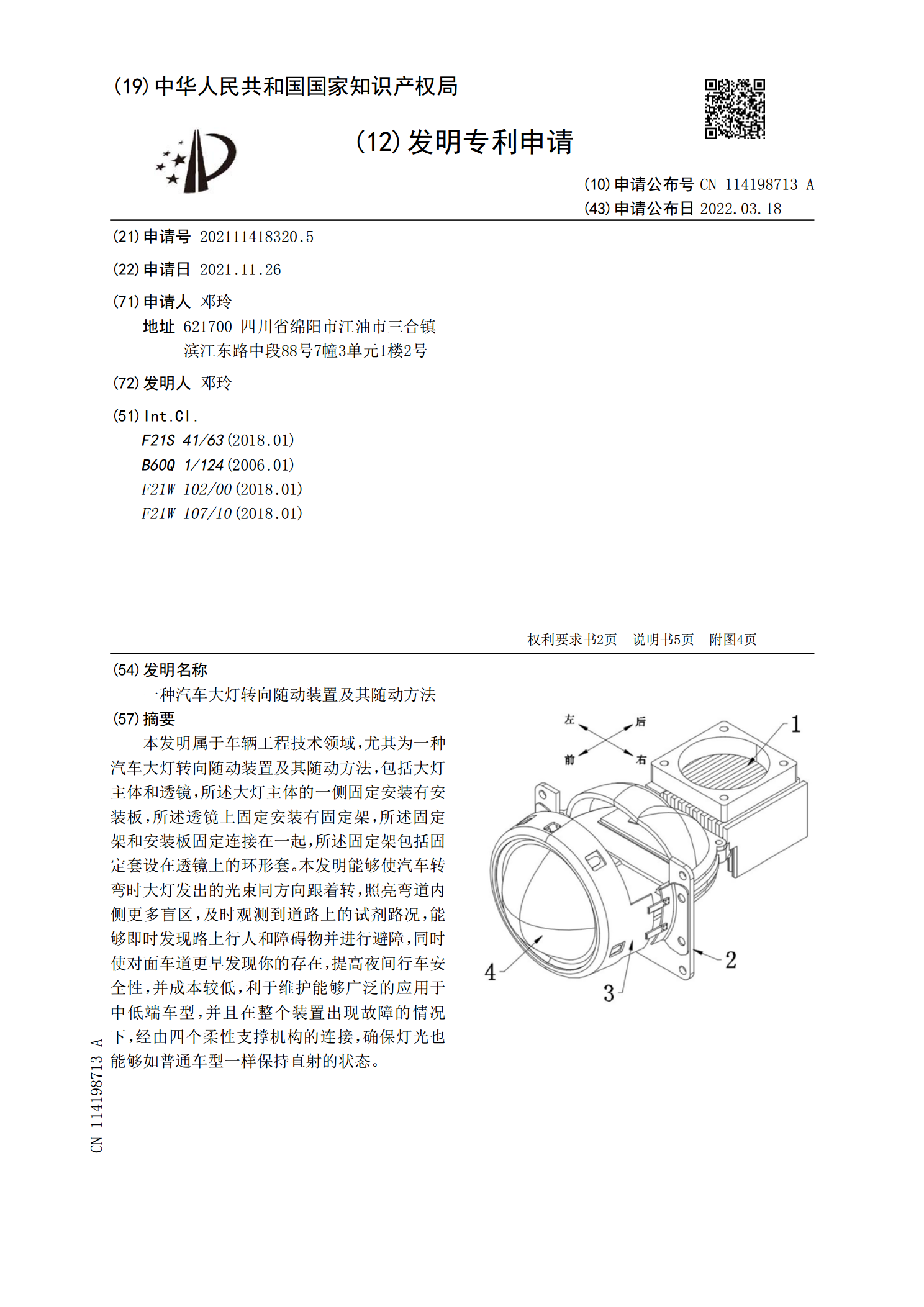
一种汽车大灯转向随动装置及其随动方法.pdf
本发明属于车辆工程技术领域,尤其为一种汽车大灯转向随动装置及其随动方法,包括大灯主体和透镜,所述大灯主体的一侧固定安装有安装板,所述透镜上固定安装有固定架,所述固定架和安装板固定连接在一起,所述固定架包括固定套设在透镜上的环形套。本发明能够使汽车转弯时大灯发出的光束同方向跟着转,照亮弯道内侧更多盲区,及时观测到道路上的试剂路况,能够即时发现路上行人和障碍物并进行避障,同时使对面车道更早发现你的存在,提高夜间行车安全性,并成本较低,利于维护能够广泛的应用于中低端车型,并且在整个装置出现故障的情况下,经由四个

随动转向大灯.doc
项目立题:汽车随动转向大灯电子控制系统开发课题背景:随动转向大灯也被称之为自适应大灯(AdaptiveFrontlightingSystem)英文简称AFS,随动转向大灯能够不断对大灯进行动态调节,保持与汽车的当前行驶方向一致,以确保驾驶员在任何时刻都拥有最佳的可见度,而普通大灯具有固定的照射范围,当夜间汽车在弯道上转弯时,由于无法调节照明角度,常常会在弯道内侧出现“盲区”,极大地威胁了驾驶员夜间的安全驾车。随动转向大灯现状:凯旋:随动转向双氙气大灯目前在2.0L车型中,凯旋是唯一配备随动转向双氙气大灯的
汽车大灯随动转向系统AFS介绍.ppt
系统定义AFS(AdaptiveFront-lightingSystem)-是指灯光的分布能够根据下列的各种状况来调整以达到最好的照明效果,从而增加驾驶的安全性和舒适性。道路状况改变高速路段,乡村路段,城市路段十字路口,转弯路段行车状态改变驾驶车速前方靠近的车辆,路人天气状况改变下雨,起雾曲率半径50m转向时的优点改善弯路可见性系统结构SwivelActuatorBi-XenonStructureLampStructure
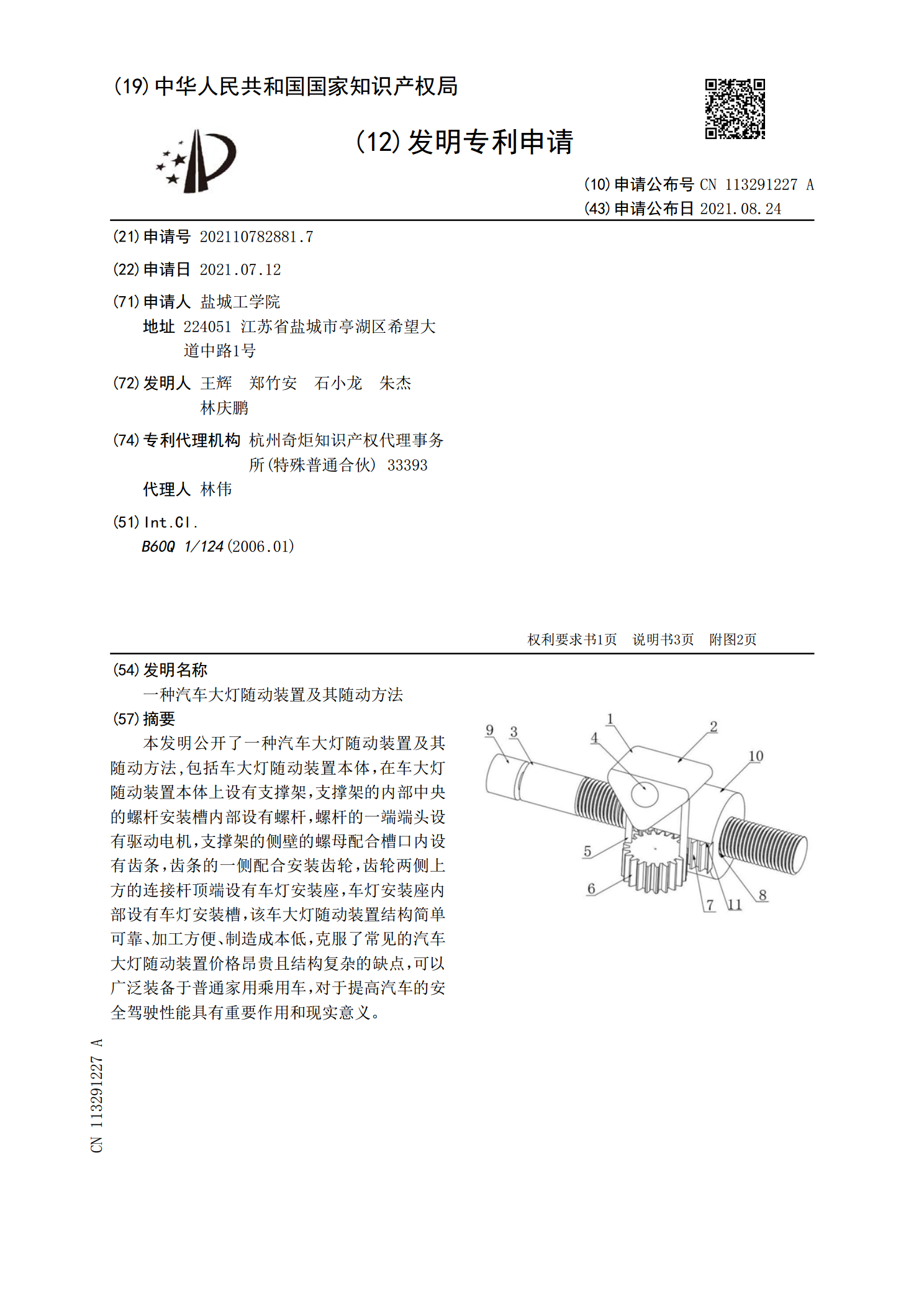
一种汽车大灯随动装置及其随动方法.pdf
本发明公开了一种汽车大灯随动装置及其随动方法,包括车大灯随动装置本体,在车大灯随动装置本体上设有支撑架,支撑架的内部中央的螺杆安装槽内部设有螺杆,螺杆的一端端头设有驱动电机,支撑架的侧壁的螺母配合槽口内设有齿条,齿条的一侧配合安装齿轮,齿轮两侧上方的连接杆顶端设有车灯安装座,车灯安装座内部设有车灯安装槽,该车大灯随动装置结构简单可靠、加工方便、制造成本低,克服了常见的汽车大灯随动装置价格昂贵且结构复杂的缺点,可以广泛装备于普通家用乘用车,对于提高汽车的安全驾驶性能具有重要作用和现实意义。