
智能导盲方法和装置.pdf

猫巷****奕声


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能导盲方法和装置.pdf
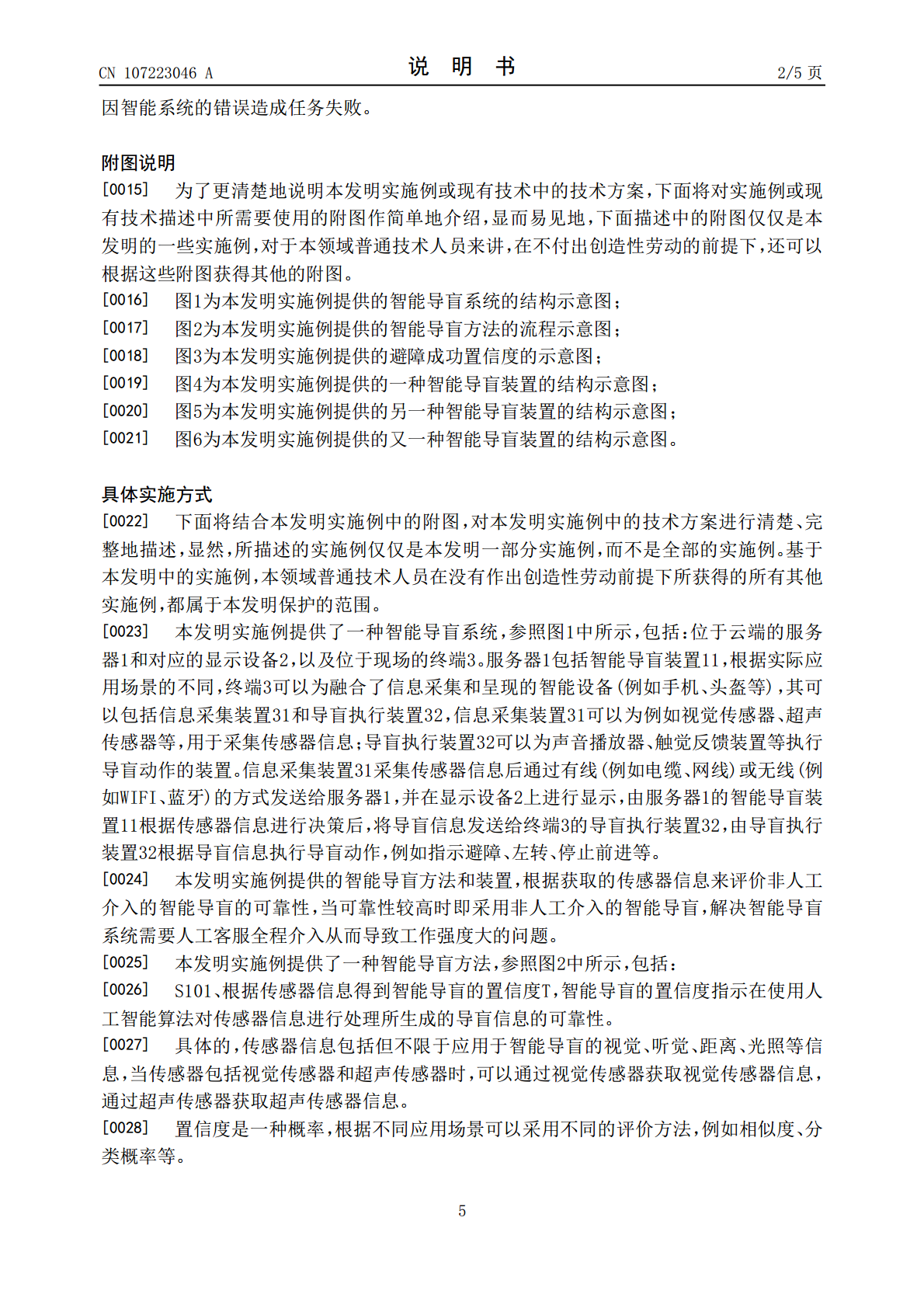
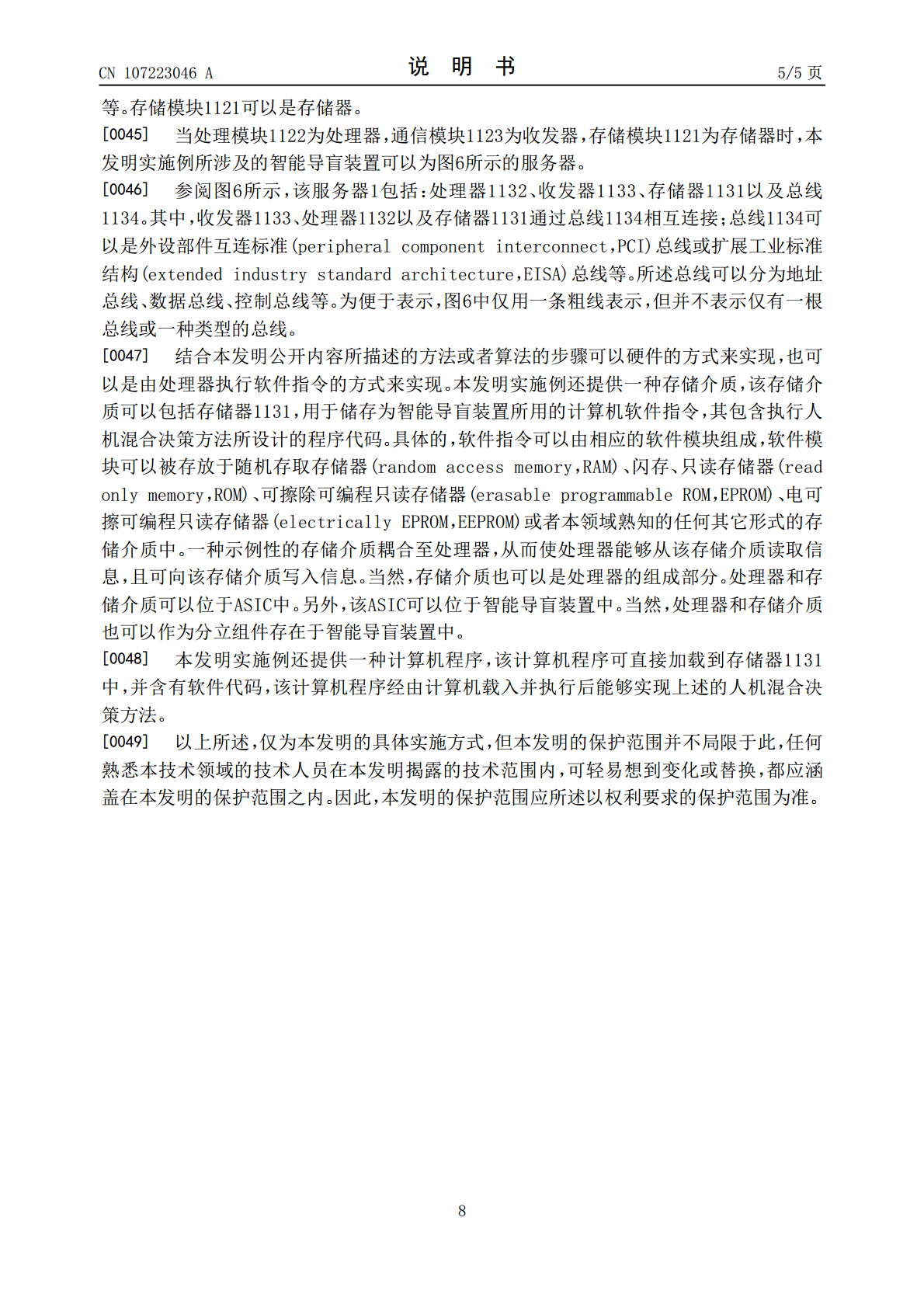
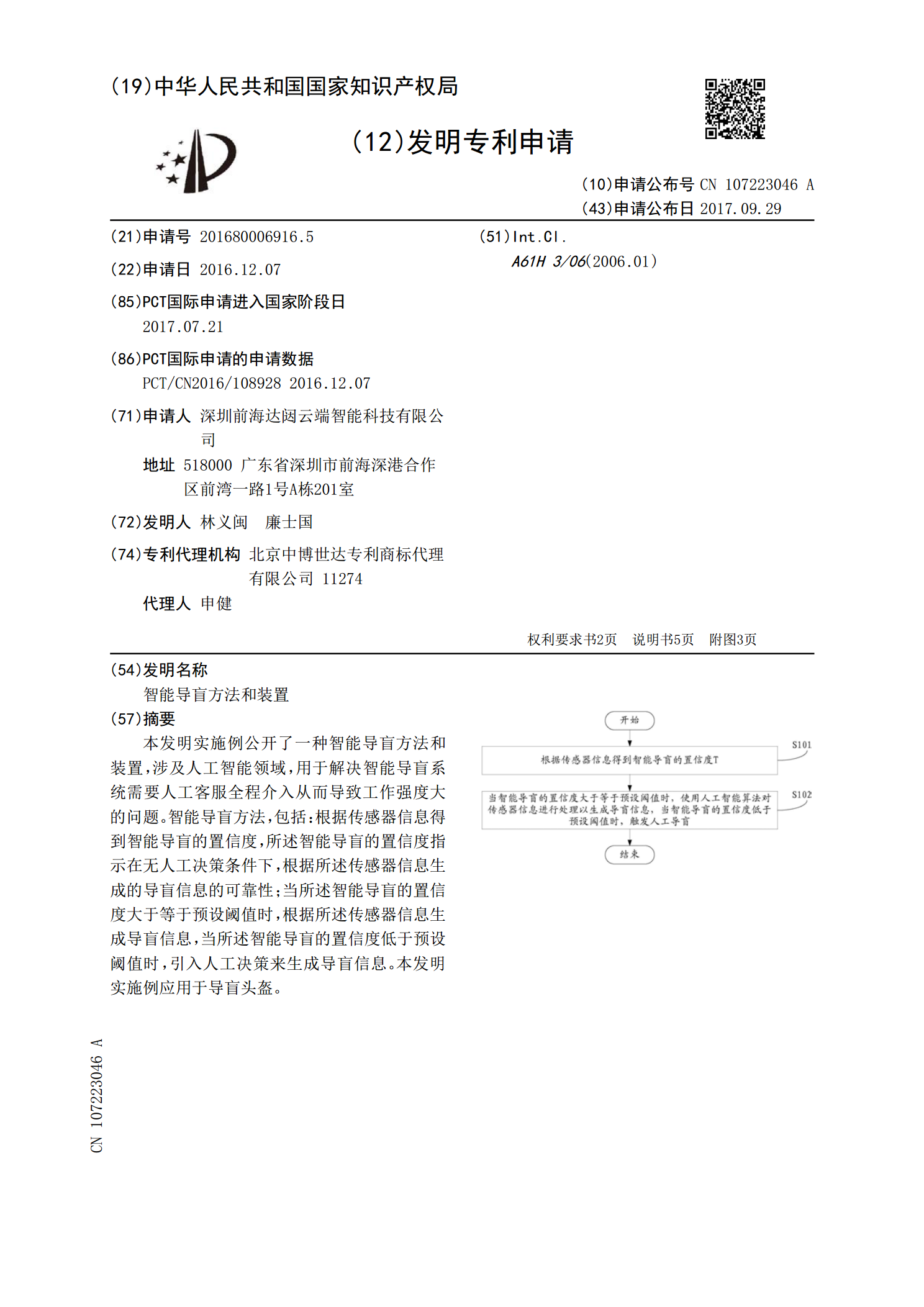
本发明实施例公开了一种智能导盲方法和装置,涉及人工智能领域,用于解决智能导盲系统需要人工客服全程介入从而导致工作强度大的问题。智能导盲方法,包括:根据传感器信息得到智能导盲的置信度,所述智能导盲的置信度指示在无人工决策条件下,根据所述传感器信息生成的导盲信息的可靠性;当所述智能导盲的置信度大于等于预设阈值时,根据所述传感器信息生成导盲信息,当所述智能导盲的置信度低于预设阈值时,引入人工决策来生成导盲信息。本发明实施例应用于导盲头盔。
一种智能导盲方法、智能导盲装置及智能导盲系统.pdf
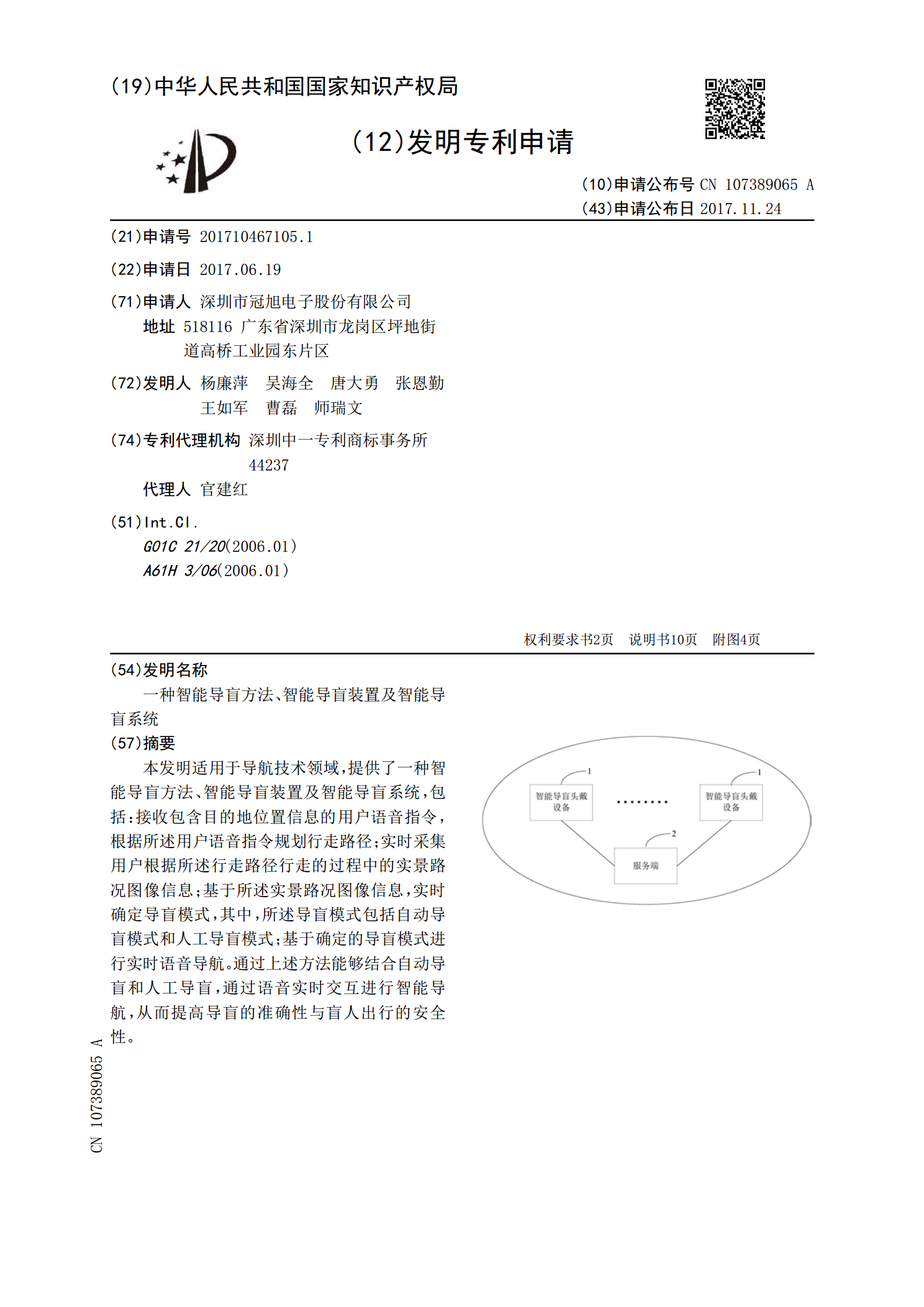
本发明适用于导航技术领域,提供了一种智能导盲方法、智能导盲装置及智能导盲系统,包括:接收包含目的地位置信息的用户语音指令,根据所述用户语音指令规划行走路径;实时采集用户根据所述行走路径行走的过程中的实景路况图像信息;基于所述实景路况图像信息,实时确定导盲模式,其中,所述导盲模式包括自动导盲模式和人工导盲模式;基于确定的导盲模式进行实时语音导航。通过上述方法能够结合自动导盲和人工导盲,通过语音实时交互进行智能导航,从而提高导盲的准确性与盲人出行的安全性。
智能导盲系统和智能导盲方法.pdf
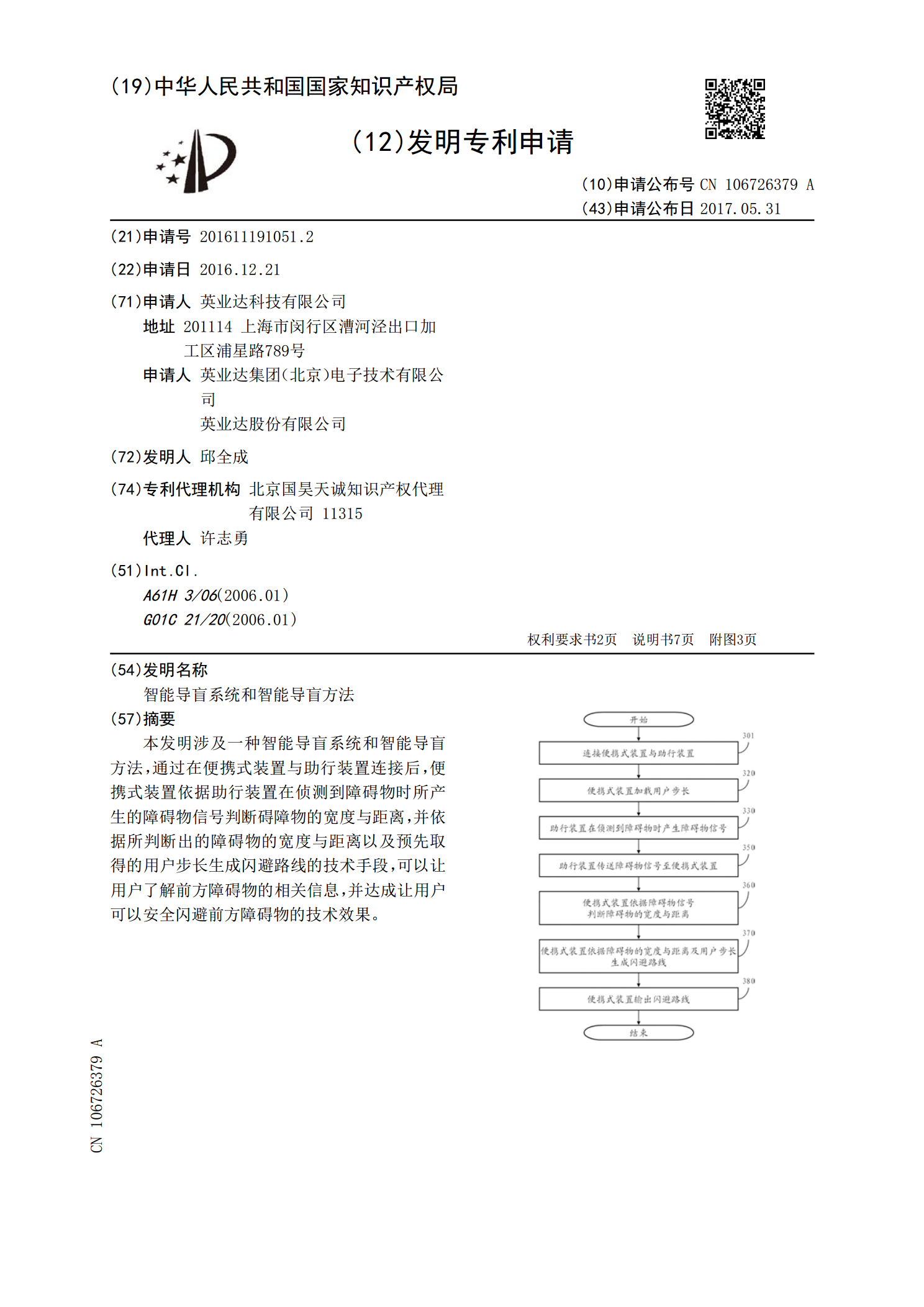
本发明涉及一种智能导盲系统和智能导盲方法,通过在便携式装置与助行装置连接后,便携式装置依据助行装置在侦测到障碍物时所产生的障碍物信号判断碍障物的宽度与距离,并依据所判断出的障碍物的宽度与距离以及预先取得的用户步长生成闪避路线的技术手段,可以让用户了解前方障碍物的相关信息,并达成让用户可以安全闪避前方障碍物的技术效果。
导盲装置和导盲方法.pdf
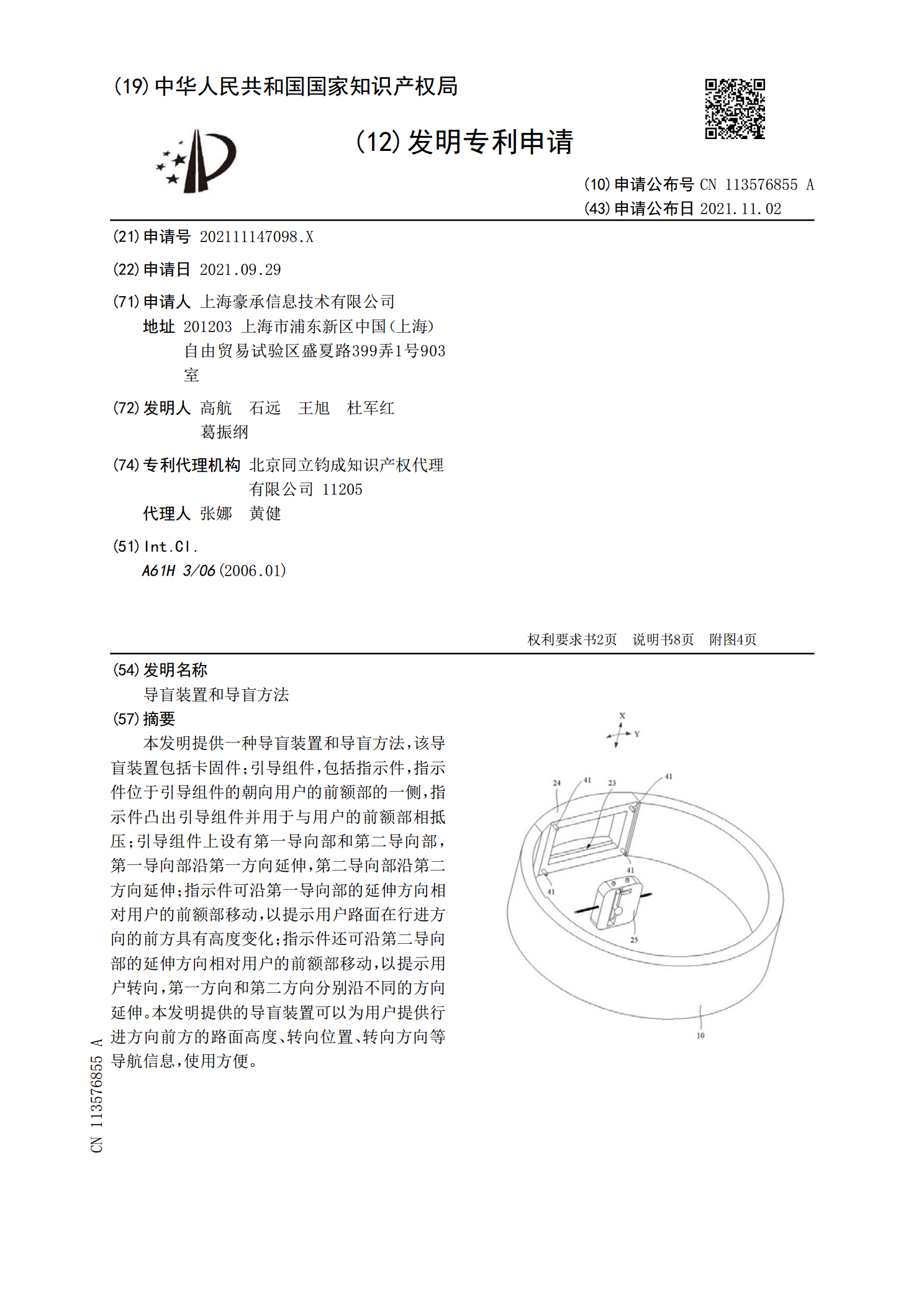
本发明提供一种导盲装置和导盲方法,该导盲装置包括卡固件;引导组件,包括指示件,指示件位于引导组件的朝向用户的前额部的一侧,指示件凸出引导组件并用于与用户的前额部相抵压;引导组件上设有第一导向部和第二导向部,第一导向部沿第一方向延伸,第二导向部沿第二方向延伸;指示件可沿第一导向部的延伸方向相对用户的前额部移动,以提示用户路面在行进方向的前方具有高度变化;指示件还可沿第二导向部的延伸方向相对用户的前额部移动,以提示用户转向,第一方向和第二方向分别沿不同的方向延伸。本发明提供的导盲装置可以为用户提供行进方向前方
导盲方法、装置和导盲设备.pdf
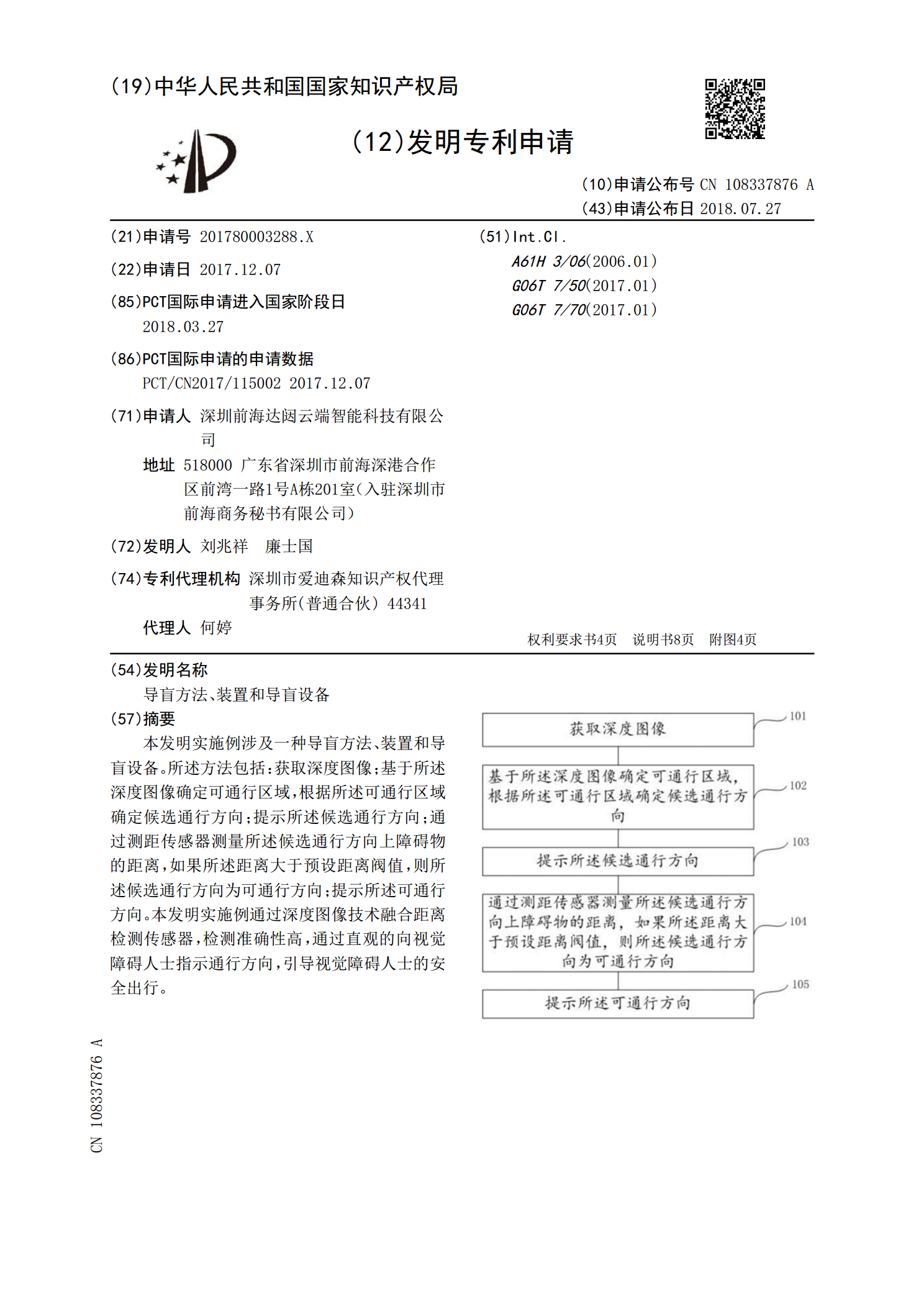
本发明实施例涉及一种导盲方法、装置和导盲设备。所述方法包括:获取深度图像;基于所述深度图像确定可通行区域,根据所述可通行区域确定候选通行方向;提示所述候选通行方向;通过测距传感器测量所述候选通行方向上障碍物的距离,如果所述距离大于预设距离阀值,则所述候选通行方向为可通行方向;提示所述可通行方向。本发明实施例通过深度图像技术融合距离检测传感器,检测准确性高,通过直观的向视觉障碍人士指示通行方向,引导视觉障碍人士的安全出行。