
导盲方法、装置和导盲设备.pdf

一只****签网


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
导盲方法、装置和导盲设备.pdf
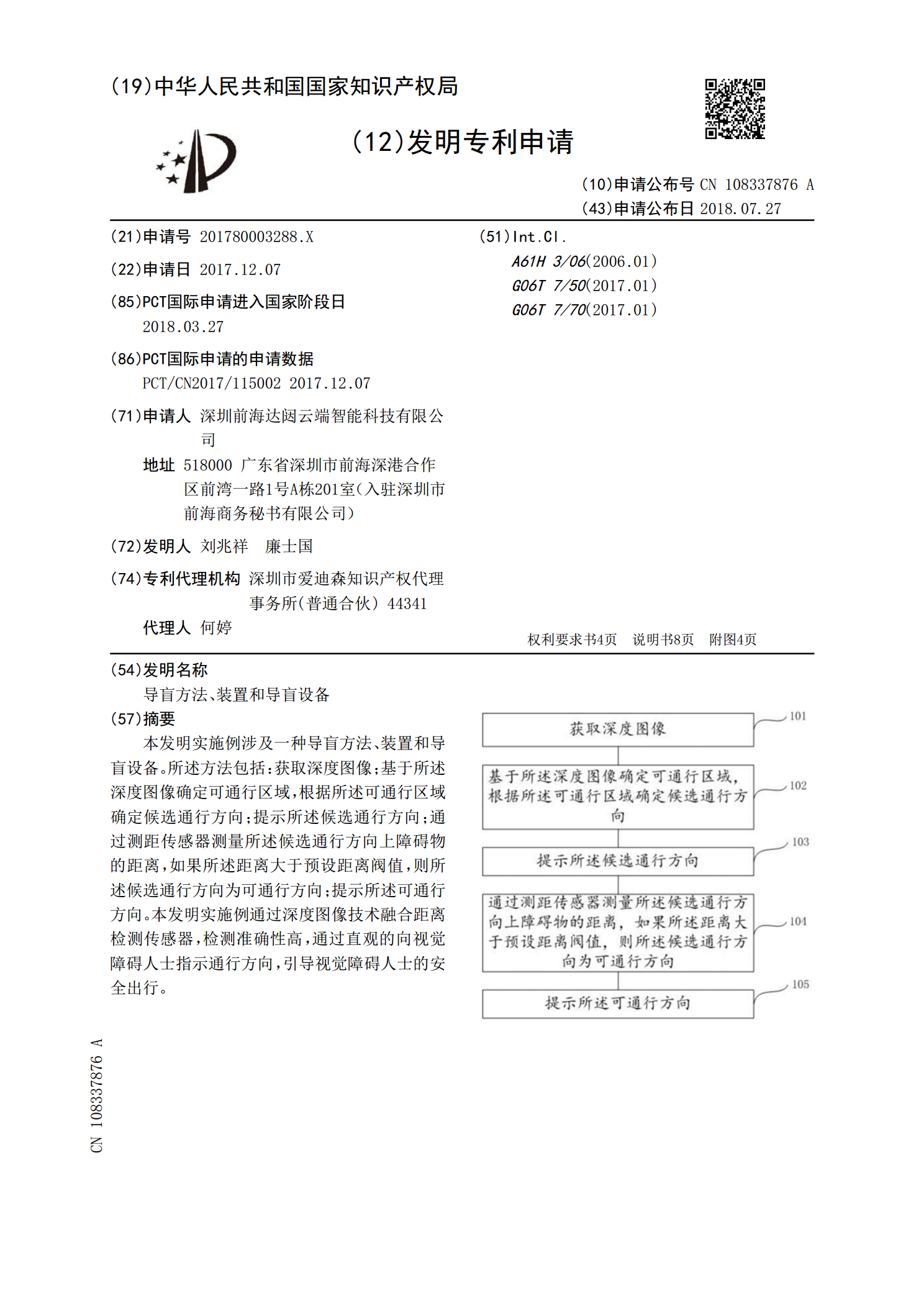
本发明实施例涉及一种导盲方法、装置和导盲设备。所述方法包括:获取深度图像;基于所述深度图像确定可通行区域,根据所述可通行区域确定候选通行方向;提示所述候选通行方向;通过测距传感器测量所述候选通行方向上障碍物的距离,如果所述距离大于预设距离阀值,则所述候选通行方向为可通行方向;提示所述可通行方向。本发明实施例通过深度图像技术融合距离检测传感器,检测准确性高,通过直观的向视觉障碍人士指示通行方向,引导视觉障碍人士的安全出行。

导盲的方法和装置以及导盲设备.pdf
本发明公开了一种导盲的方法和装置以及导盲设备,应用于导盲设备,导盲设备上设置有多个引导装置,方法包括:确定用户行进的目标方向;从多个引导装置中确定第一目标引导装置和第二目标引导装置;目标方向位于第一目标引导装置对应的引导方向和第二目标引导装置对应的引导方向之间;根据目标方向、所确定的各目标引导装置对应的引导方向确定每个目标引导装置对应的目标引导参数;按照每个目标引导装置对应的目标引导参数驱动目标引导装置。
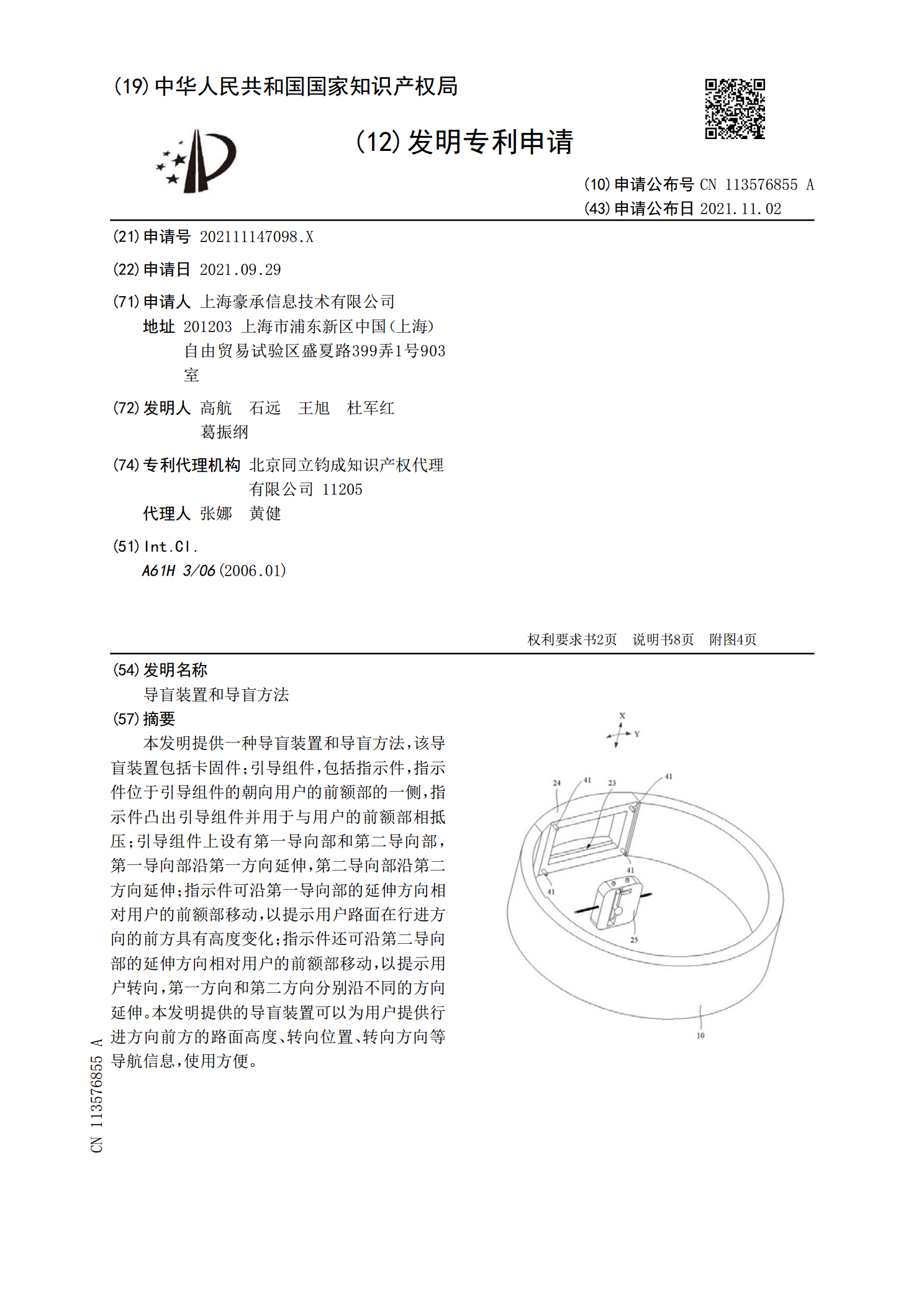
导盲装置和导盲方法.pdf
本发明提供一种导盲装置和导盲方法,该导盲装置包括卡固件;引导组件,包括指示件,指示件位于引导组件的朝向用户的前额部的一侧,指示件凸出引导组件并用于与用户的前额部相抵压;引导组件上设有第一导向部和第二导向部,第一导向部沿第一方向延伸,第二导向部沿第二方向延伸;指示件可沿第一导向部的延伸方向相对用户的前额部移动,以提示用户路面在行进方向的前方具有高度变化;指示件还可沿第二导向部的延伸方向相对用户的前额部移动,以提示用户转向,第一方向和第二方向分别沿不同的方向延伸。本发明提供的导盲装置可以为用户提供行进方向前方

导盲方法、装置、导盲设备及存储介质.pdf
本发明实施例公开了一种导盲方法、装置、导盲设备及存储介质。本申请涉及导盲技术领域,该方法包括:接收预设导盲开始指令;监听盲人的语音信息,从语音信息中获取目标地址;获取盲人所处的环境图像信息及周围被探测物体的位置信息;根据环境图像信息及被探测物体的位置信息计算出盲人所处的当前路况信息;根据目标地址及当前路况信息形成预设控制指令,基于预设控制指令向盲人播报导盲提示信息以对盲人进行导盲。本申请实施例通过获取环境图像信息及被探测物体的位置信息计算出盲人所处的当前路况信息,根据当前路况信息及获取的目标地址形成预设控
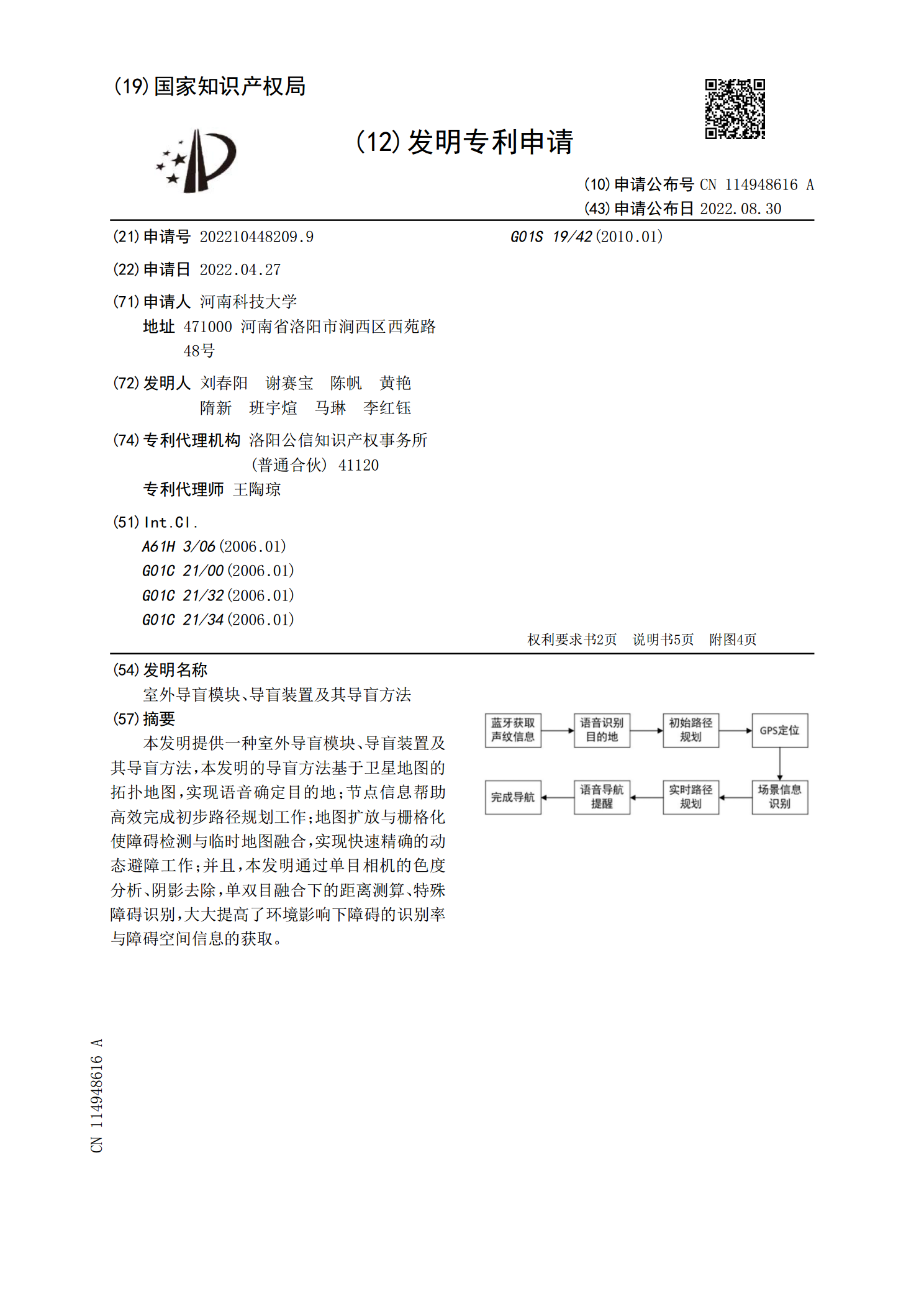
室外导盲模块、导盲装置及其导盲方法.pdf
本发明提供一种室外导盲模块、导盲装置及其导盲方法,本发明的导盲方法基于卫星地图的拓扑地图,实现语音确定目的地;节点信息帮助高效完成初步路径规划工作;地图扩放与栅格化使障碍检测与临时地图融合,实现快速精确的动态避障工作;并且,本发明通过单目相机的色度分析、阴影去除,单双目融合下的距离测算、特殊障碍识别,大大提高了环境影响下障碍的识别率与障碍空间信息的获取。