
空间定位装置、定位处理方法及装置、虚拟现实系统.pdf

东耀****哥哥

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
空间定位装置、定位处理方法及装置、虚拟现实系统.pdf
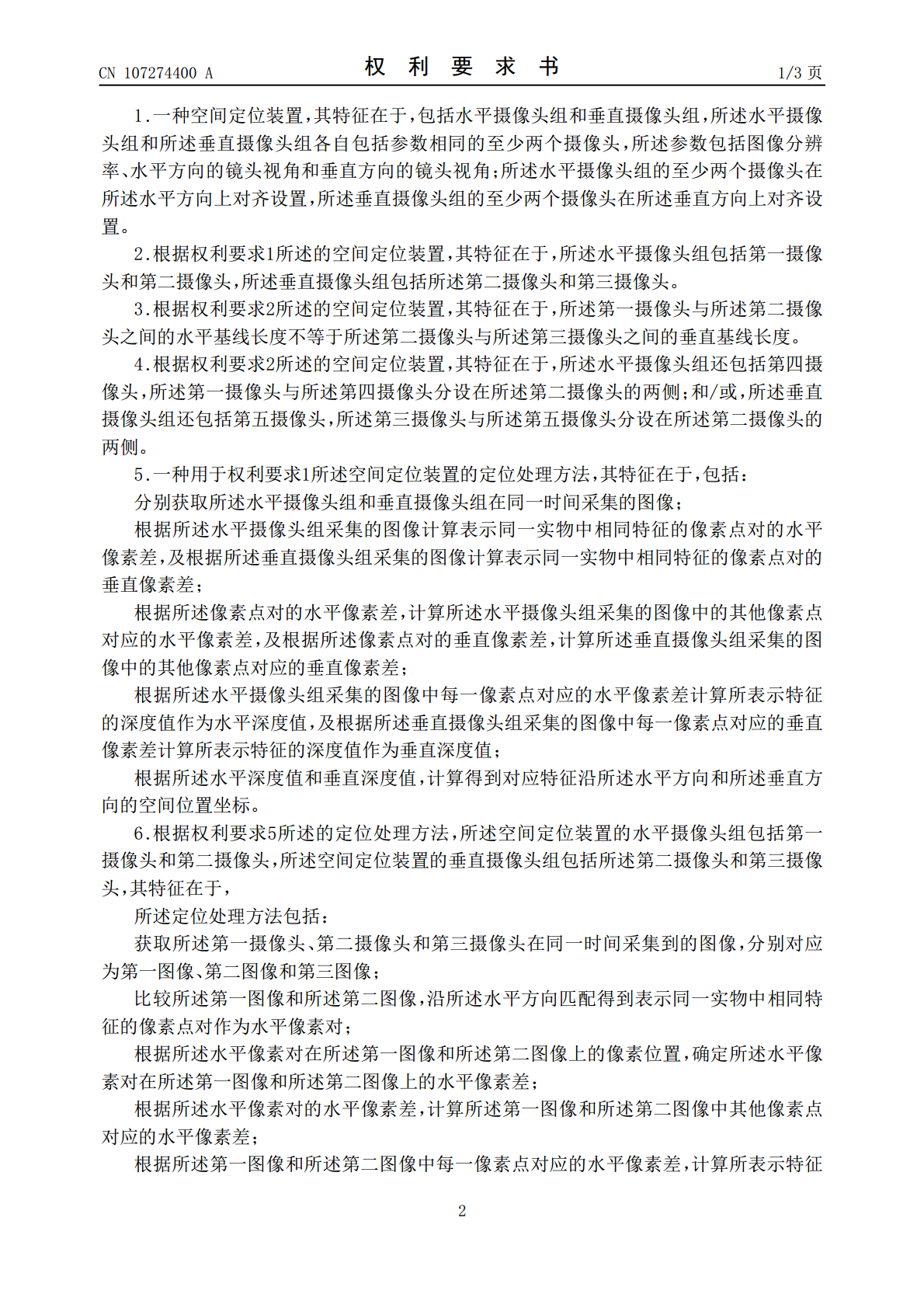
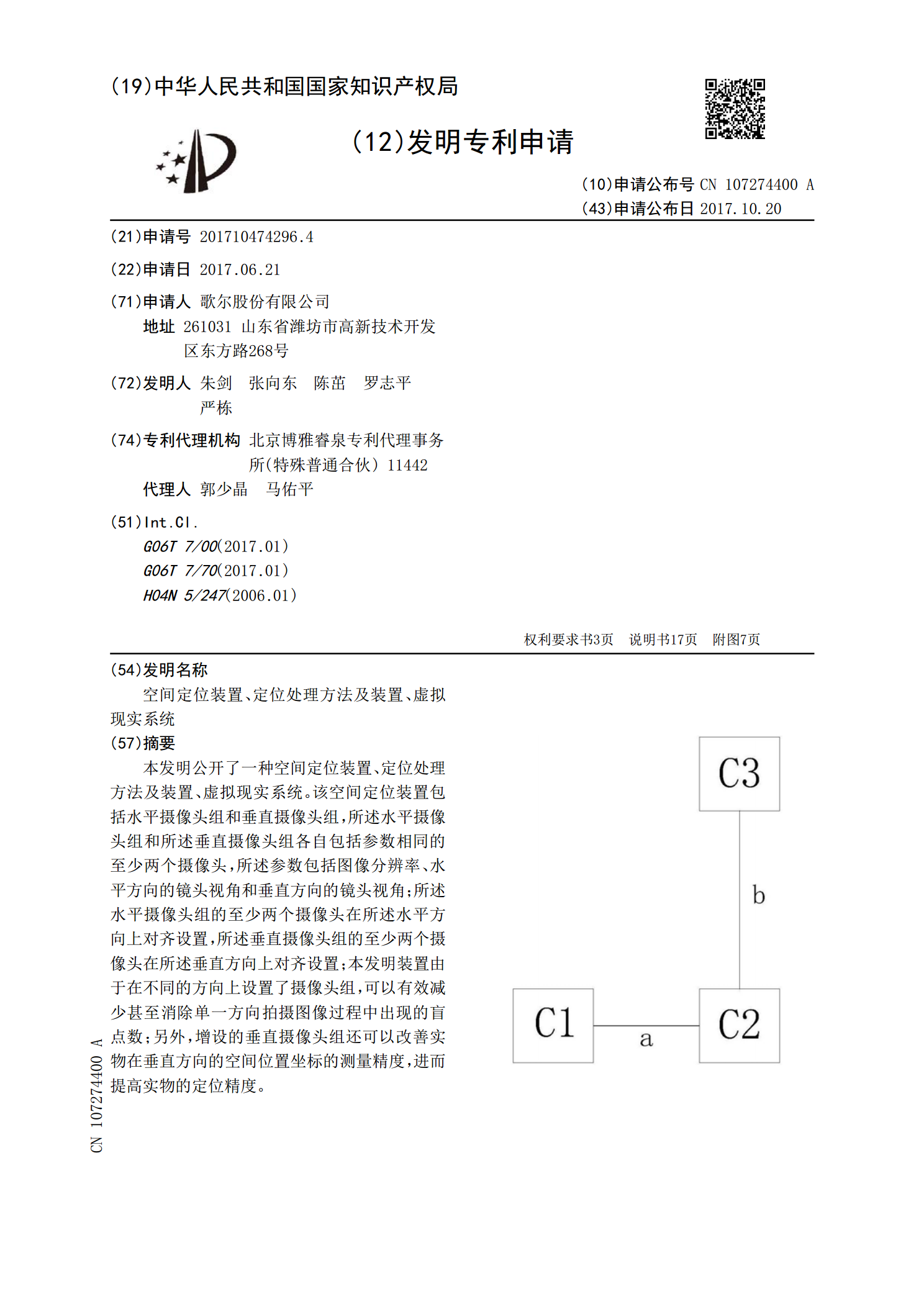
本发明公开了一种空间定位装置、定位处理方法及装置、虚拟现实系统。该空间定位装置包括水平摄像头组和垂直摄像头组,所述水平摄像头组和所述垂直摄像头组各自包括参数相同的至少两个摄像头,所述参数包括图像分辨率、水平方向的镜头视角和垂直方向的镜头视角;所述水平摄像头组的至少两个摄像头在所述水平方向上对齐设置,所述垂直摄像头组的至少两个摄像头在所述垂直方向上对齐设置;本发明装置由于在不同的方向上设置了摄像头组,可以有效减少甚至消除单一方向拍摄图像过程中出现的盲点数;另外,增设的垂直摄像头组还可以改善实物在垂直方向的空

虚拟现实系统中的空间定位方法、装置及系统.pdf
本发明公开了一种虚拟现实系统中的空间定位方法、装置及系统,该方法包括:控制包括多个摄像装置的摄像装置组采集标定反光点的图像,获取相邻的两个摄像装置采集的跟标定反光点的图像,建立跟标定反光点与跟摄像装置组的空间位置关系模型,当摄像装置组随用户同步运动时,再次获取相邻的两个摄像装置采集的标定反光点的图像,再次建立跟标定反光点与跟摄像装置组的空间位置关系模型,比较此两个空间位置关系模型,得出跟用户的运动前后的位置变化信息。本发明降低了定位过程中的计算量,降低定位技术难度,可在VR移动系统中实现定位产品量化,提高
一种空间定位方法、装置及系统.pdf
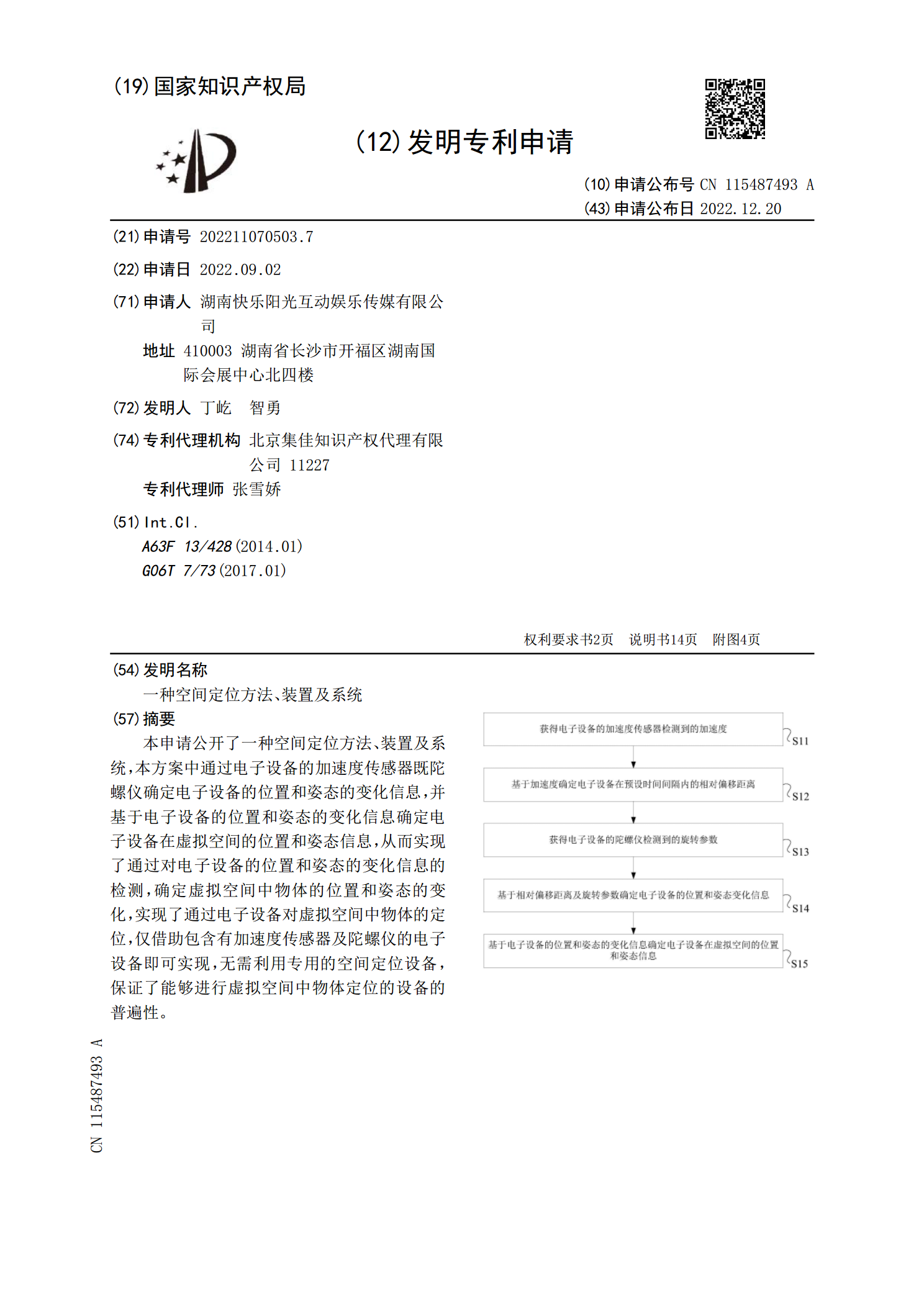
本申请公开了一种空间定位方法、装置及系统,本方案中通过电子设备的加速度传感器既陀螺仪确定电子设备的位置和姿态的变化信息,并基于电子设备的位置和姿态的变化信息确定电子设备在虚拟空间的位置和姿态信息,从而实现了通过对电子设备的位置和姿态的变化信息的检测,确定虚拟空间中物体的位置和姿态的变化,实现了通过电子设备对虚拟空间中物体的定位,仅借助包含有加速度传感器及陀螺仪的电子设备即可实现,无需利用专用的空间定位设备,保证了能够进行虚拟空间中物体定位的设备的普遍性。
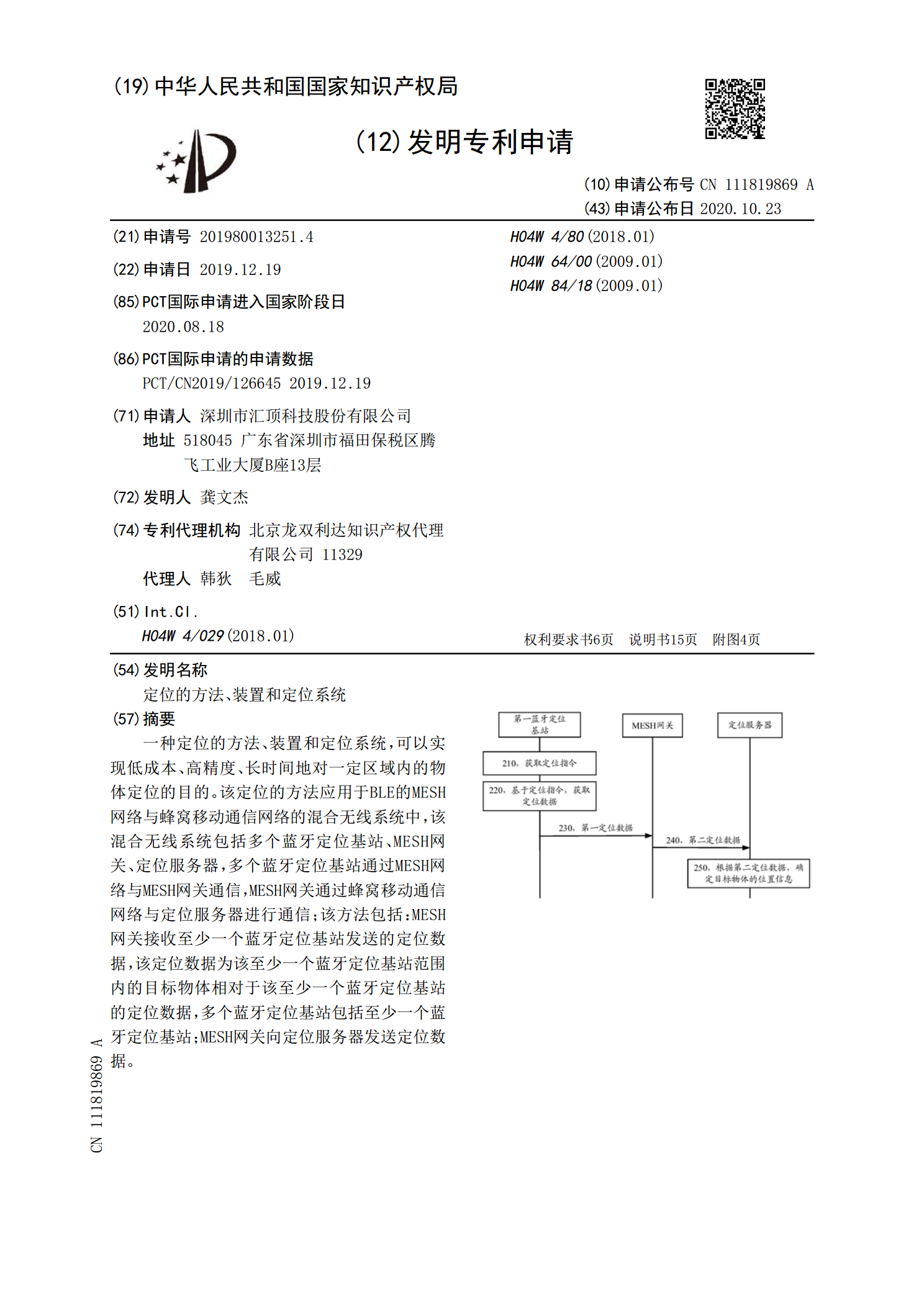
定位的方法、装置和定位系统.pdf
一种定位的方法、装置和定位系统,可以实现低成本、高精度、长时间地对一定区域内的物体定位的目的。该定位的方法应用于BLE的MESH网络与蜂窝移动通信网络的混合无线系统中,该混合无线系统包括多个蓝牙定位基站、MESH网关、定位服务器,多个蓝牙定位基站通过MESH网络与MESH网关通信,MESH网关通过蜂窝移动通信网络与定位服务器进行通信;该方法包括:MESH网关接收至少一个蓝牙定位基站发送的定位数据,该定位数据为该至少一个蓝牙定位基站范围内的目标物体相对于该至少一个蓝牙定位基站的定位数据,多个蓝牙定位基站包括
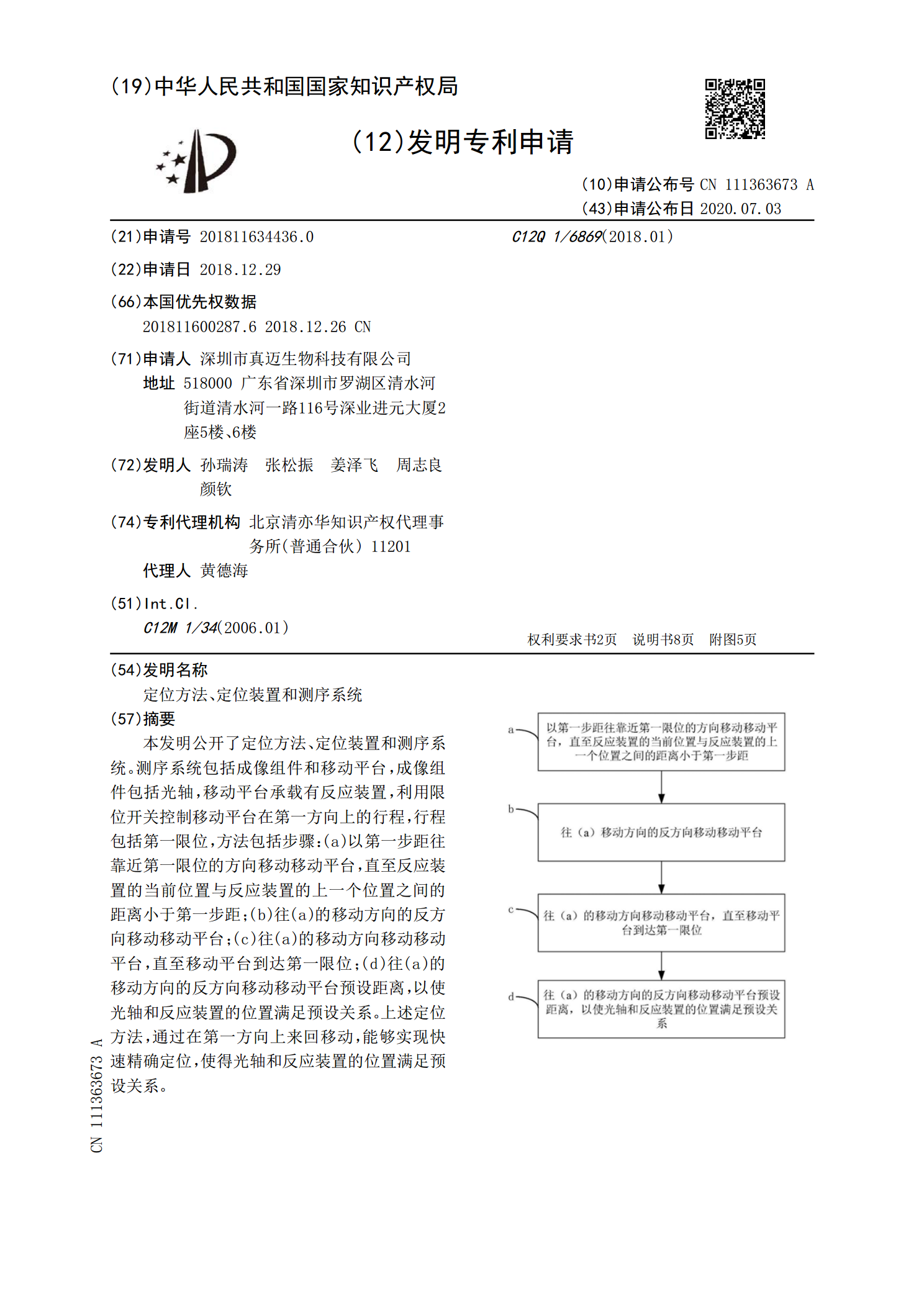
定位方法、定位装置和测序系统.pdf
本发明公开了定位方法、定位装置和测序系统。测序系统包括成像组件和移动平台,成像组件包括光轴,移动平台承载有反应装置,利用限位开关控制移动平台在第一方向上的行程,行程包括第一限位,方法包括步骤:(a)以第一步距往靠近第一限位的方向移动移动平台,直至反应装置的当前位置与反应装置的上一个位置之间的距离小于第一步距;(b)往(a)的移动方向的反方向移动移动平台;(c)往(a)的移动方向移动移动平台,直至移动平台到达第一限位;(d)往(a)的移动方向的反方向移动移动平台预设距离,以使光轴和反应装置的位置满足预设关系