
一种自动导航车的路面检测方法及系统.pdf

文光****iu

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动导航车的路面检测方法及系统.pdf
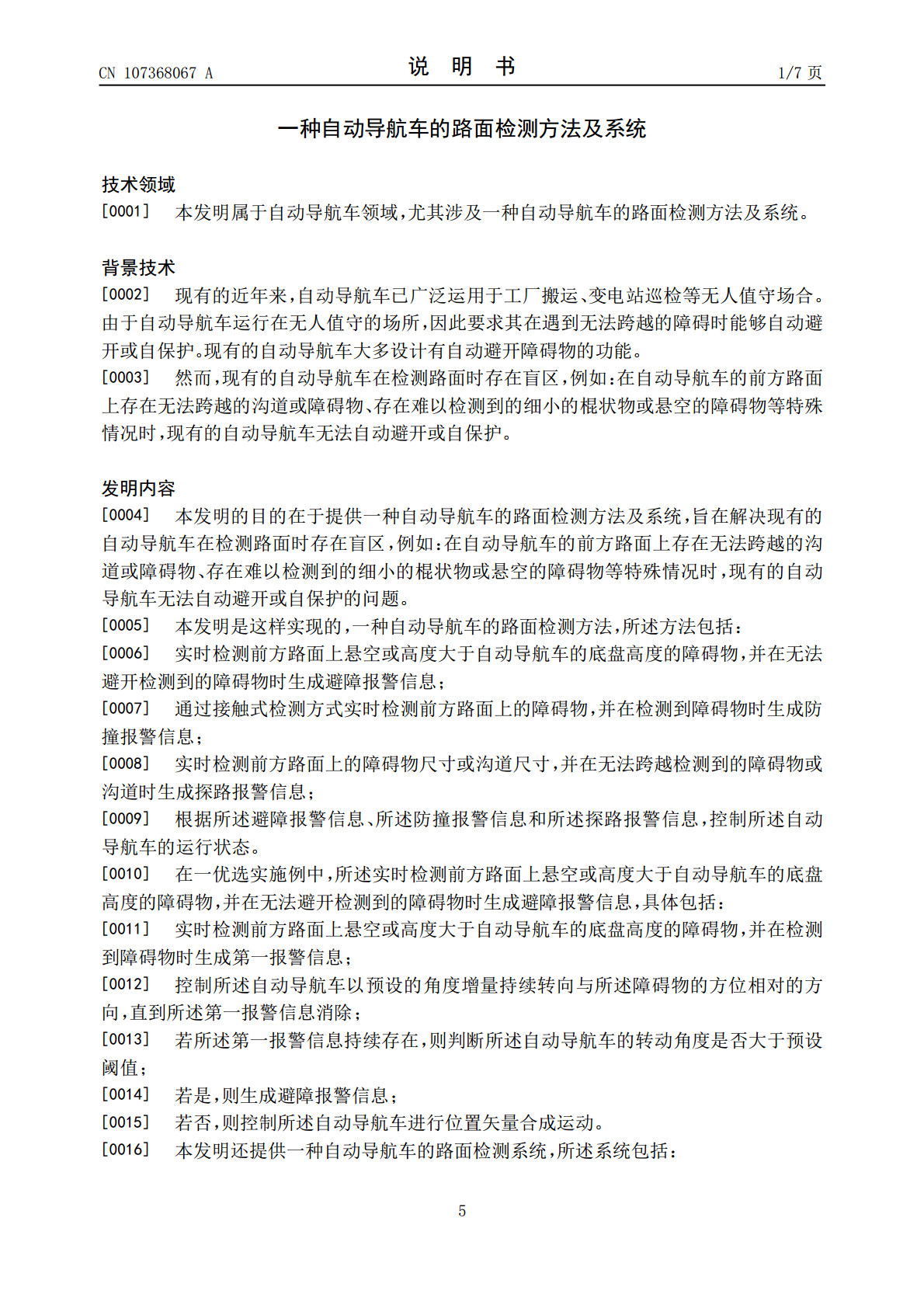
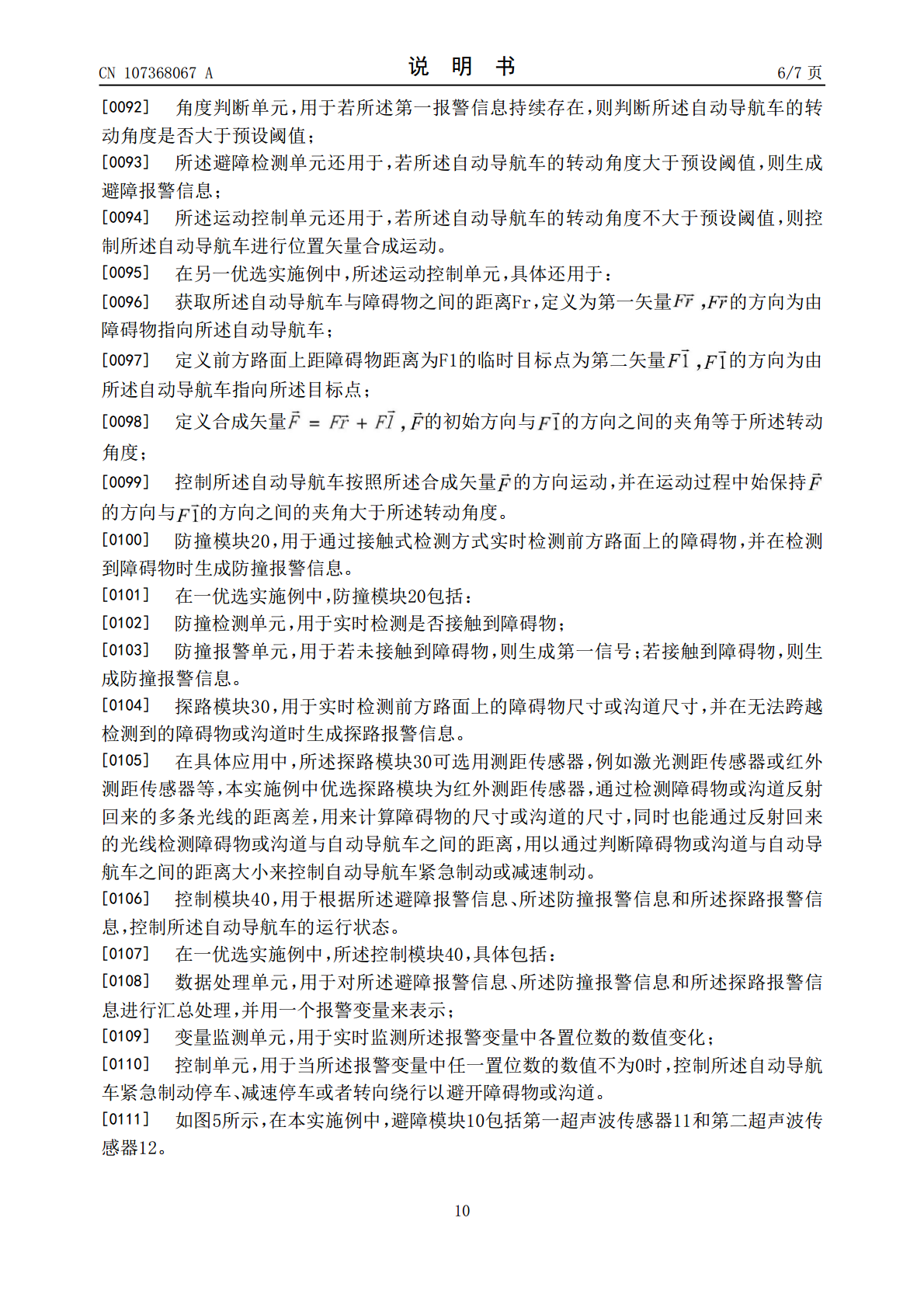
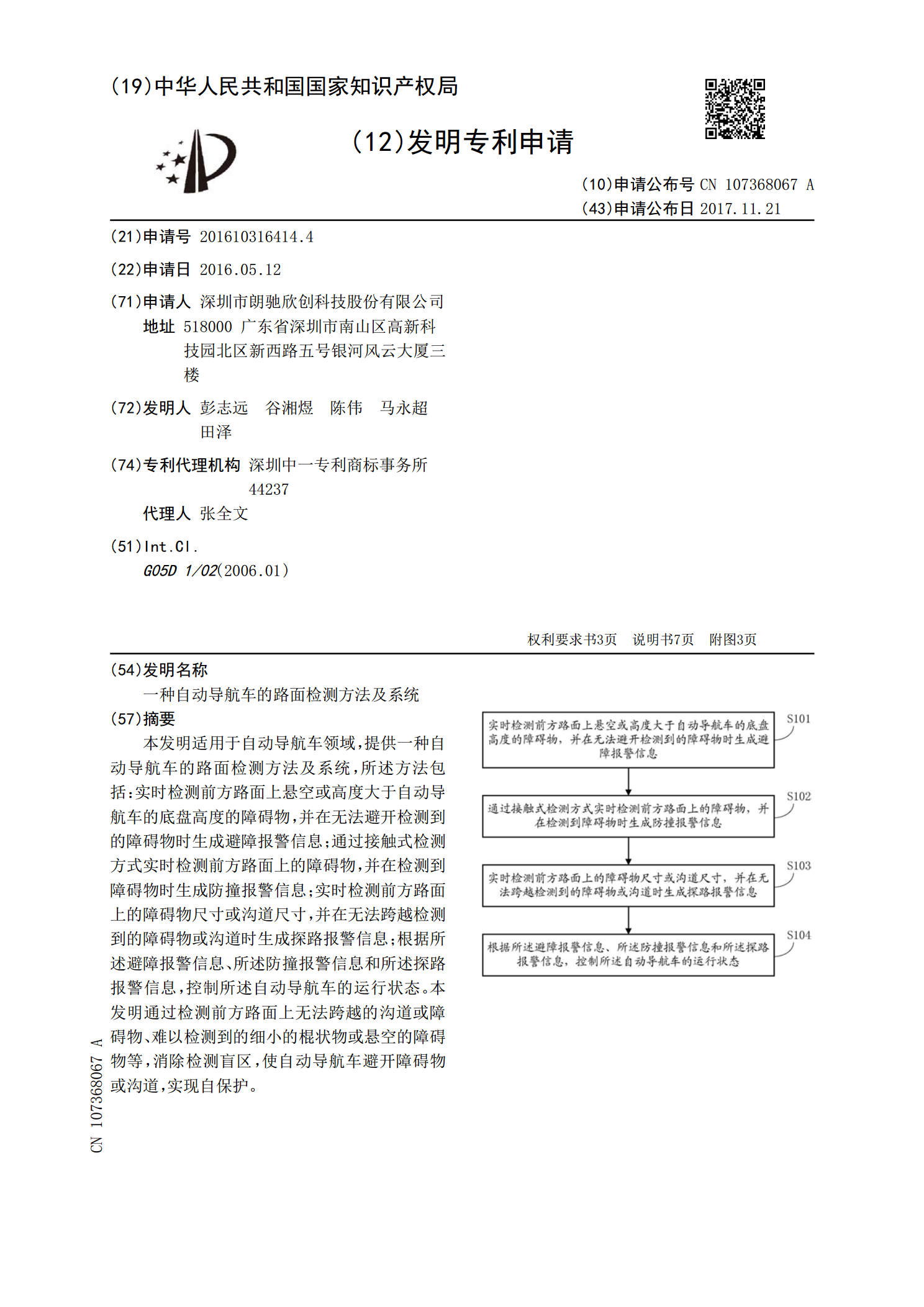
本发明适用于自动导航车领域,提供一种自动导航车的路面检测方法及系统,所述方法包括:实时检测前方路面上悬空或高度大于自动导航车的底盘高度的障碍物,并在无法避开检测到的障碍物时生成避障报警信息;通过接触式检测方式实时检测前方路面上的障碍物,并在检测到障碍物时生成防撞报警信息;实时检测前方路面上的障碍物尺寸或沟道尺寸,并在无法跨越检测到的障碍物或沟道时生成探路报警信息;根据所述避障报警信息、所述防撞报警信息和所述探路报警信息,控制所述自动导航车的运行状态。本发明通过检测前方路面上无法跨越的沟道或障碍物、难以检测
取货方法、自动导航车及智能仓储系统.pdf
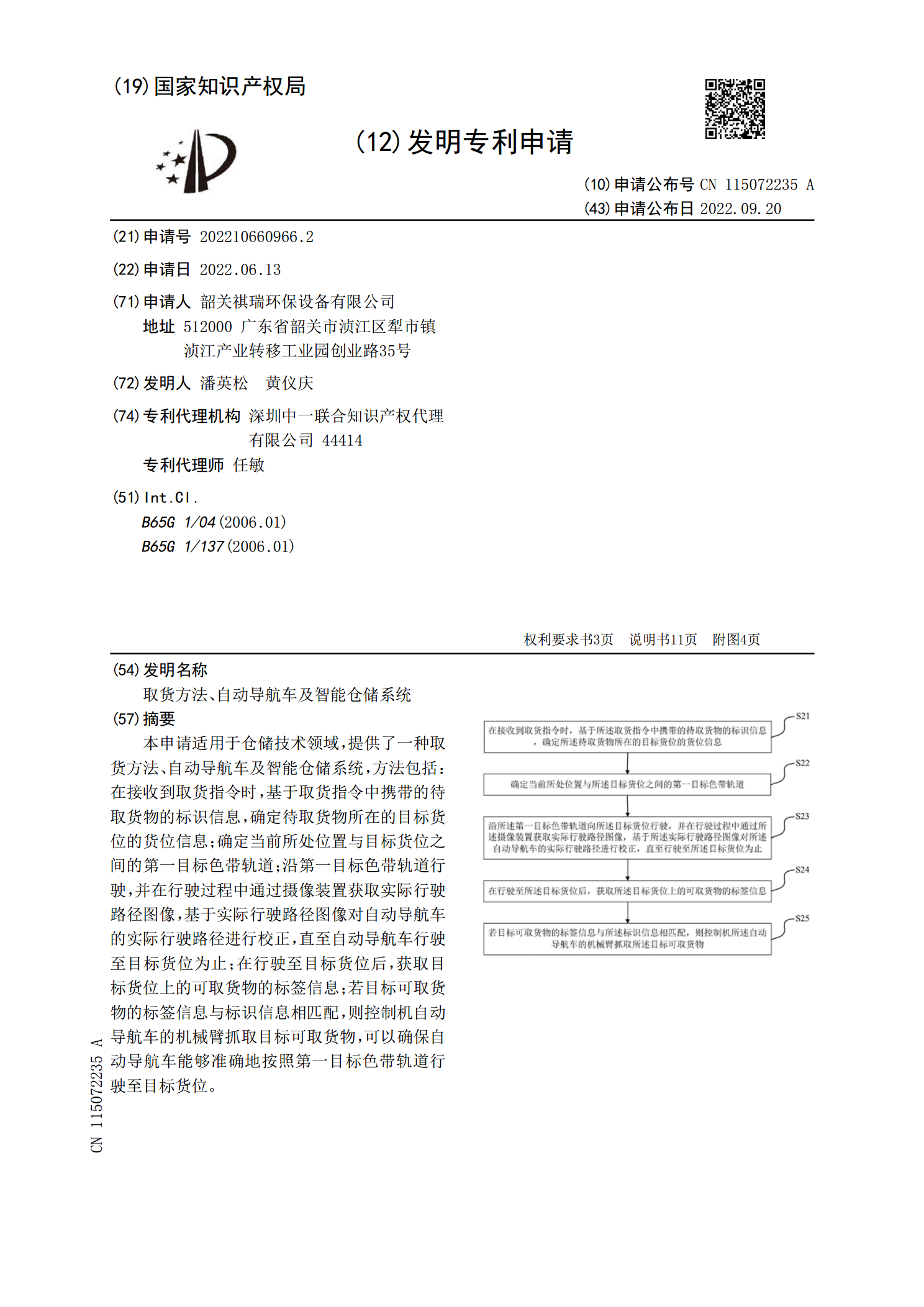
本申请适用于仓储技术领域,提供了一种取货方法、自动导航车及智能仓储系统,方法包括:在接收到取货指令时,基于取货指令中携带的待取货物的标识信息,确定待取货物所在的目标货位的货位信息;确定当前所处位置与目标货位之间的第一目标色带轨道;沿第一目标色带轨道行驶,并在行驶过程中通过摄像装置获取实际行驶路径图像,基于实际行驶路径图像对自动导航车的实际行驶路径进行校正,直至自动导航车行驶至目标货位为止;在行驶至目标货位后,获取目标货位上的可取货物的标签信息;若目标可取货物的标签信息与标识信息相匹配,则控制机自动导航车的

一种自动导航车的驱动悬挂装置及自动导航车.pdf
本发明公开的是一种自动导航车的驱动悬挂装置,悬挂在车架下面,包括驱动轮组、安装板,所述的驱动轮组固定在安装板下面,所述的安装板两侧边分别固定有侧护板,所述的侧护板下侧角与所述的车架铰接;所述的安装板上面横向固定有压力调节装置,所述的压力调节装置可调节地向所述的车架施加压力。本发明还公开了一种具有该驱动悬挂装置的自动导航车。本发明方便驱动轮组压力调节,利于车架底盘空间的利用。

一种自动导航车综合检测装置.pdf
本发明提供了一种自动导航车综合检测装置,涉及导航车检测技术领域,采用的方案是:包括振动平台、龙门架以及模拟作业机械手,模拟作业机械手安装于龙门架的横梁并可进行移动,振动平台位于龙门架的两个立柱之间,龙门架能够移动,振动平台连接有振动动力机构,振动平台具有多个台面板,台面板的下部设置有悬挂机构,悬挂机构上安装有多个滚轮,台面板支撑在滚轮上,悬挂机构上连接有升降机构,升降机构能够驱动悬挂机构升降进而顶动台面板发生倾斜。本发明带来的效果是:足以应对绝大部分的特种AGV的额外工具的测试环境,可以有效的考验AGV对
自动导引运输车的导航方法、系统和自动导引运输车.pdf
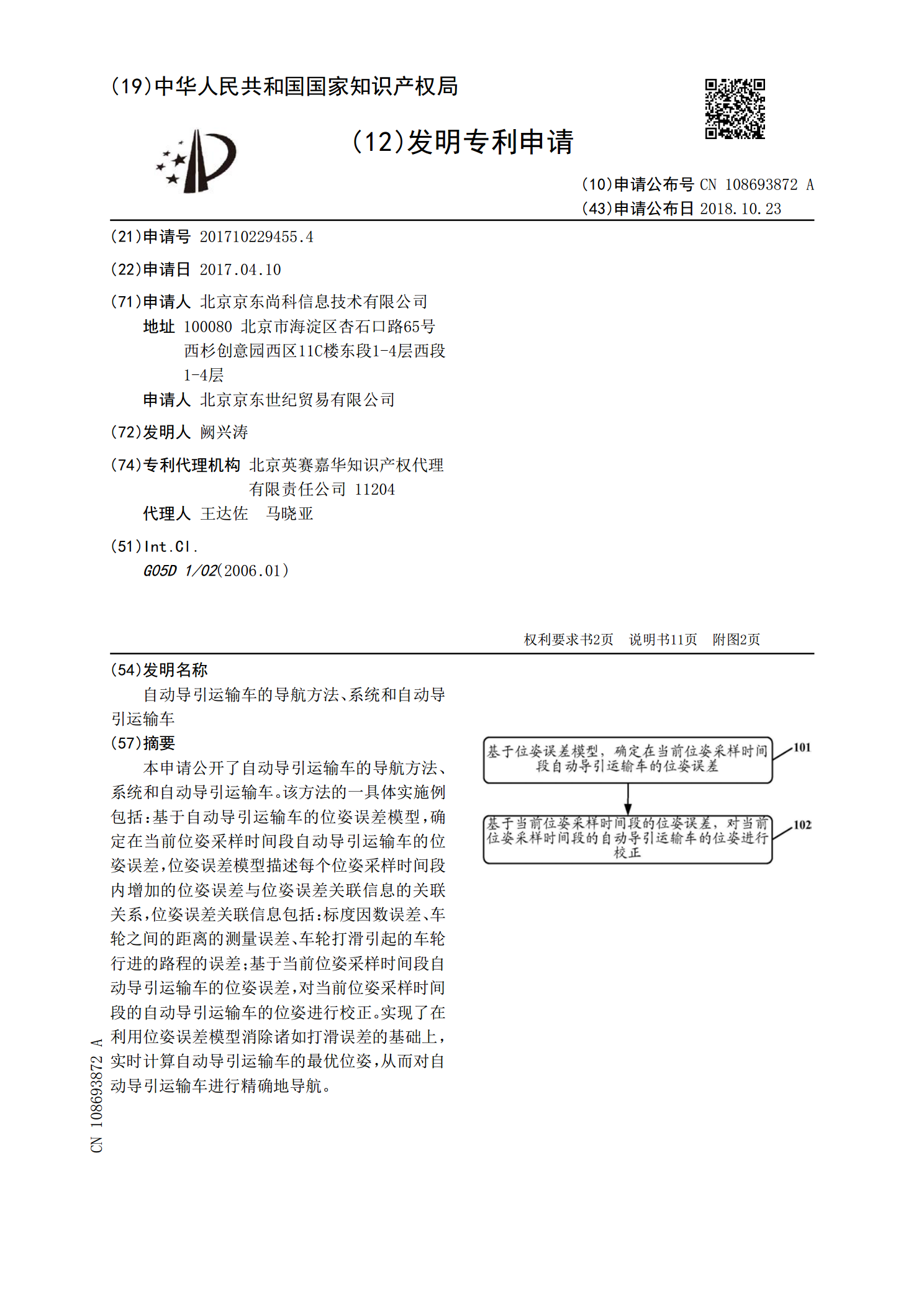
本申请公开了自动导引运输车的导航方法、系统和自动导引运输车。该方法的一具体实施例包括:基于自动导引运输车的位姿误差模型,确定在当前位姿采样时间段自动导引运输车的位姿误差,位姿误差模型描述每个位姿采样时间段内增加的位姿误差与位姿误差关联信息的关联关系,位姿误差关联信息包括:标度因数误差、车轮之间的距离的测量误差、车轮打滑引起的车轮行进的路程的误差;基于当前位姿采样时间段自动导引运输车的位姿误差,对当前位姿采样时间段的自动导引运输车的位姿进行校正。实现了在利用位姿误差模型消除诸如打滑误差的基础上,实时计算自动