
取货方法、自动导航车及智能仓储系统.pdf

mm****酱吖

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
取货方法、自动导航车及智能仓储系统.pdf
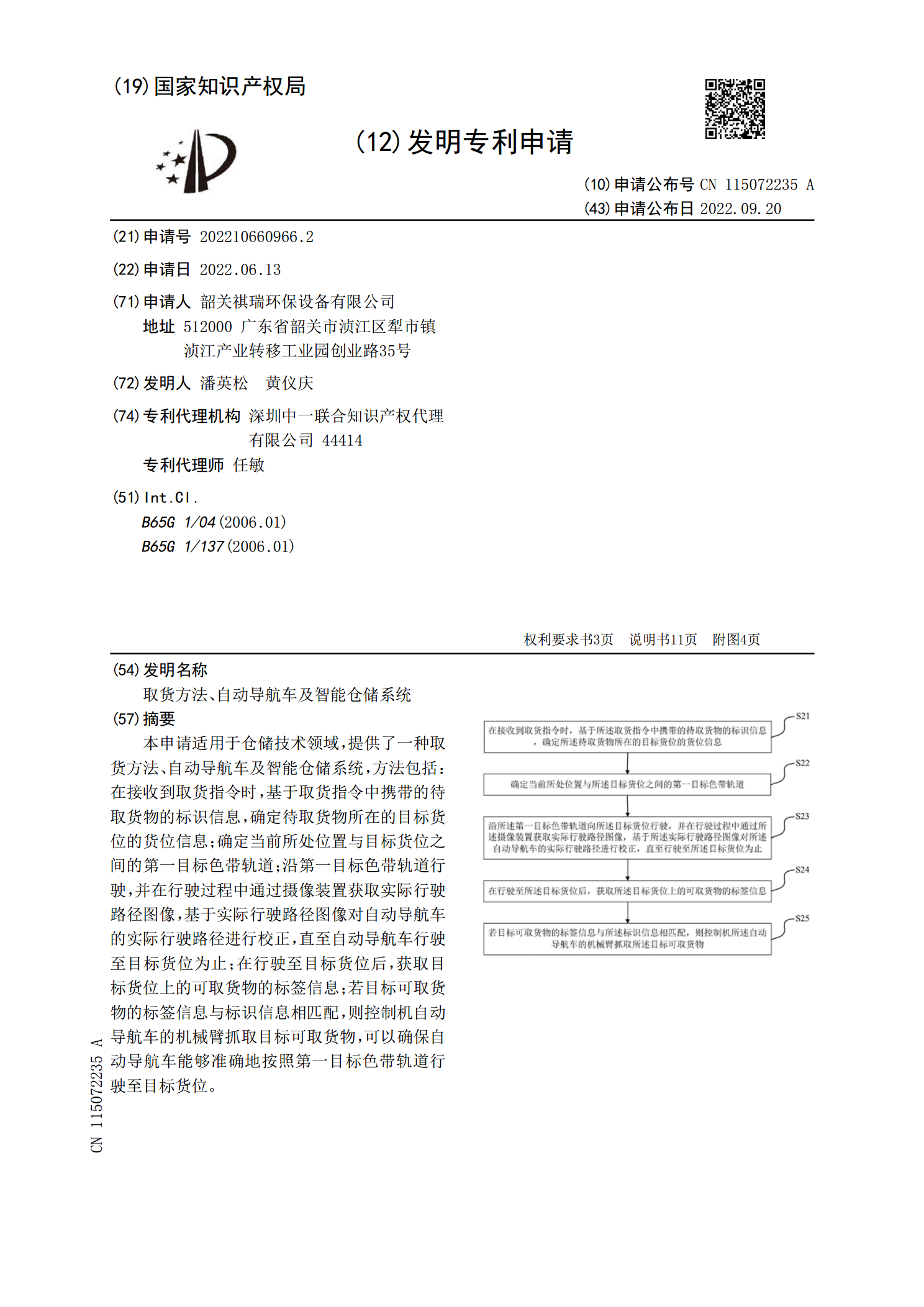
本申请适用于仓储技术领域,提供了一种取货方法、自动导航车及智能仓储系统,方法包括:在接收到取货指令时,基于取货指令中携带的待取货物的标识信息,确定待取货物所在的目标货位的货位信息;确定当前所处位置与目标货位之间的第一目标色带轨道;沿第一目标色带轨道行驶,并在行驶过程中通过摄像装置获取实际行驶路径图像,基于实际行驶路径图像对自动导航车的实际行驶路径进行校正,直至自动导航车行驶至目标货位为止;在行驶至目标货位后,获取目标货位上的可取货物的标签信息;若目标可取货物的标签信息与标识信息相匹配,则控制机自动导航车的
一种智能存取货物的自动化仓储货架.pdf
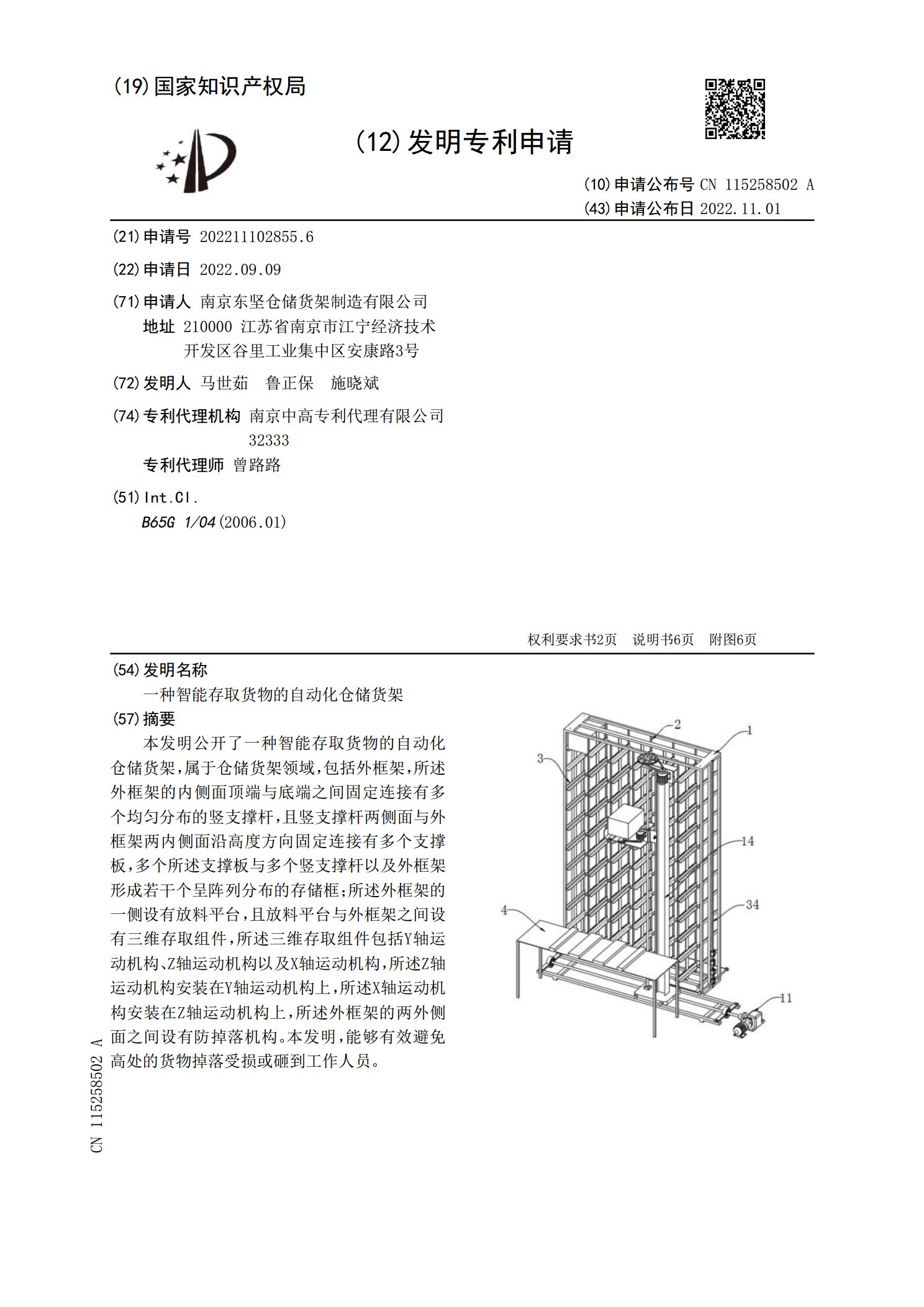
本发明公开了一种智能存取货物的自动化仓储货架,属于仓储货架领域,包括外框架,所述外框架的内侧面顶端与底端之间固定连接有多个均匀分布的竖支撑杆,且竖支撑杆两侧面与外框架两内侧面沿高度方向固定连接有多个支撑板,多个所述支撑板与多个竖支撑杆以及外框架形成若干个呈阵列分布的存储框;所述外框架的一侧设有放料平台,且放料平台与外框架之间设有三维存取组件,所述三维存取组件包括Y轴运动机构、Z轴运动机构以及X轴运动机构,所述Z轴运动机构安装在Y轴运动机构上,所述X轴运动机构安装在Z轴运动机构上,所述外框架的两外侧面之间设
移动箱式自动仓储取货设备.pdf
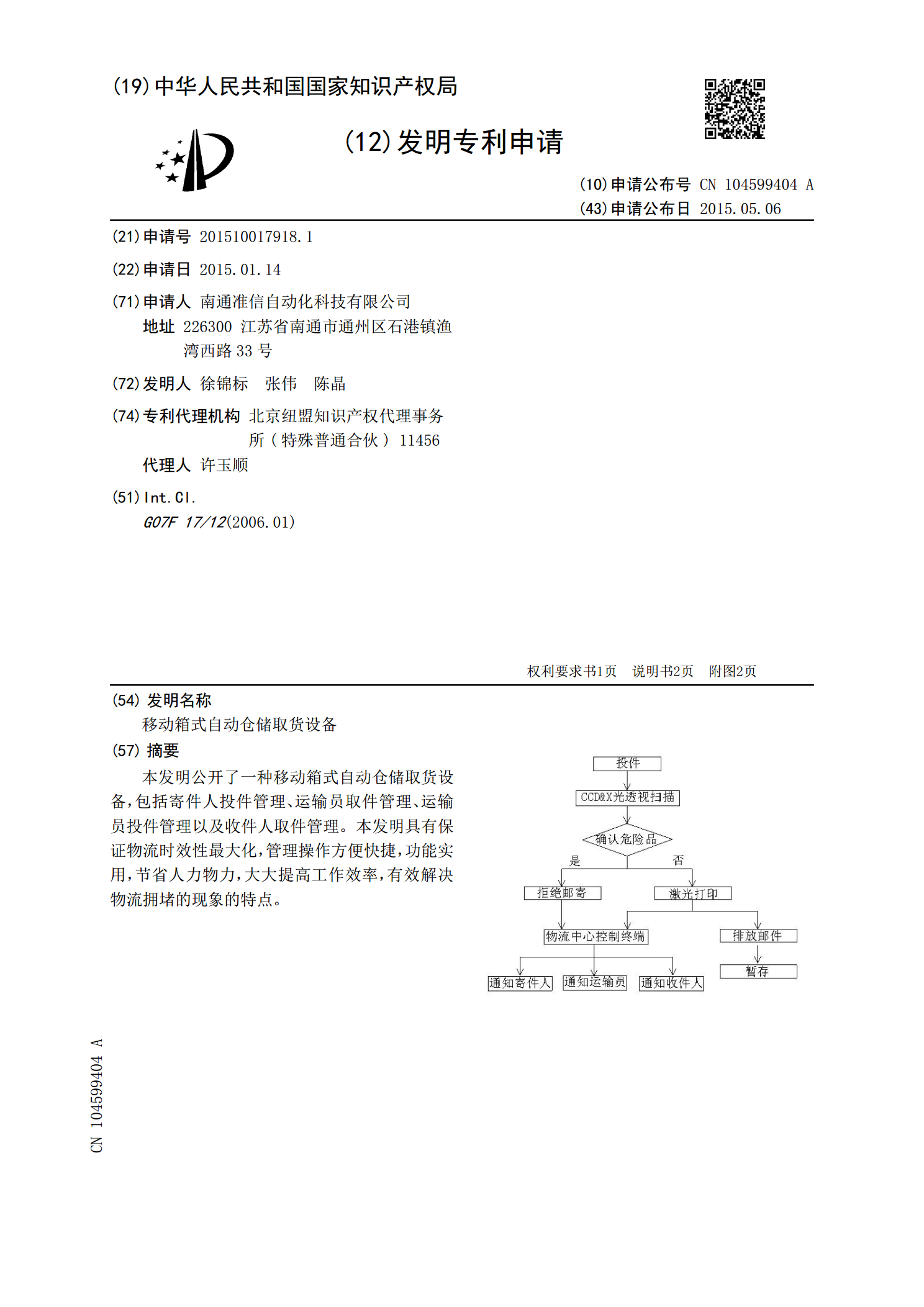
本发明公开了一种移动箱式自动仓储取货设备,包括寄件人投件管理、运输员取件管理、运输员投件管理以及收件人取件管理。本发明具有保证物流时效性最大化,管理操作方便快捷,功能实用,节省人力物力,大大提高工作效率,有效解决物流拥堵的现象的特点。
自动导引运输车的导航方法、系统和自动导引运输车.pdf
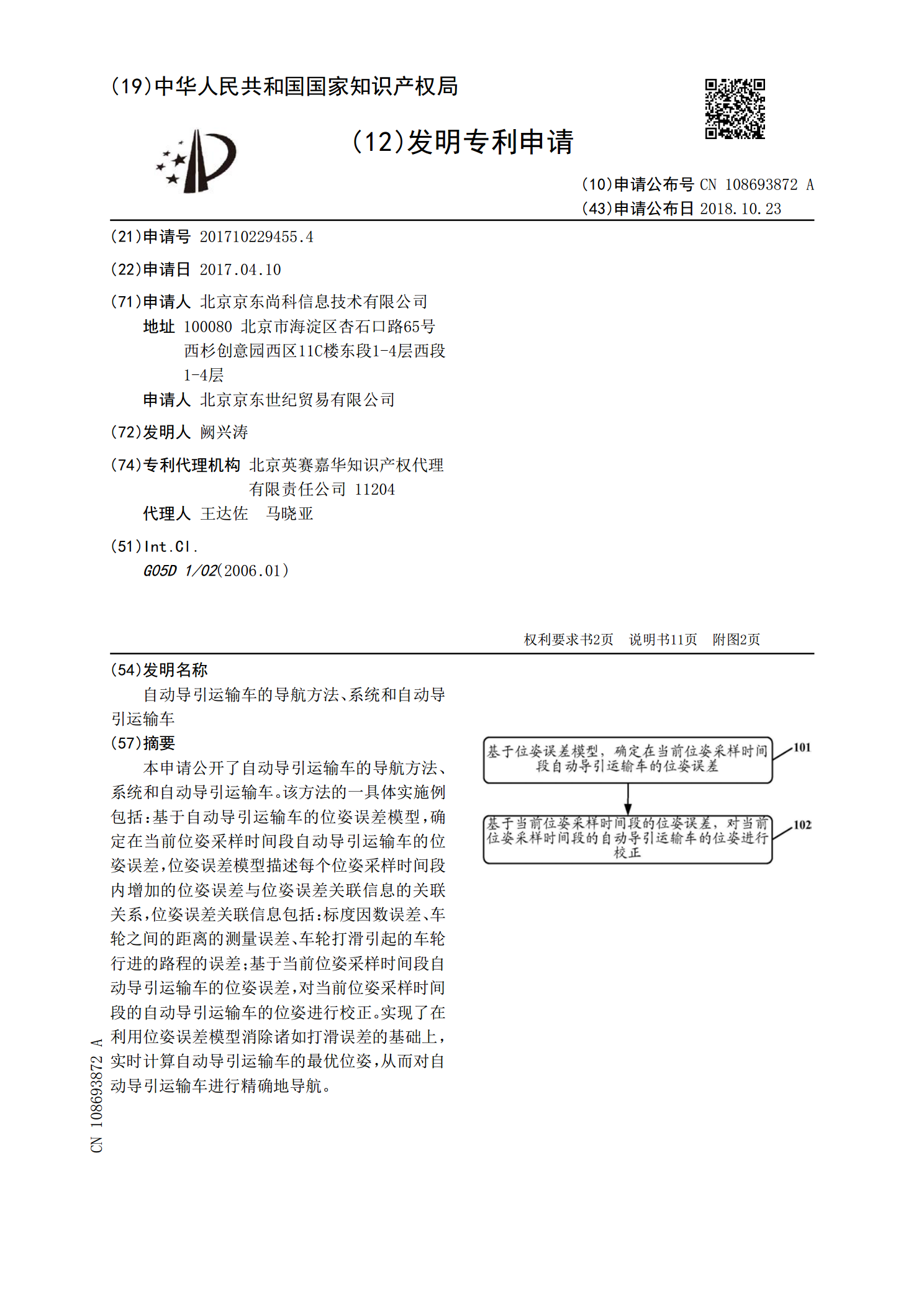
本申请公开了自动导引运输车的导航方法、系统和自动导引运输车。该方法的一具体实施例包括:基于自动导引运输车的位姿误差模型,确定在当前位姿采样时间段自动导引运输车的位姿误差,位姿误差模型描述每个位姿采样时间段内增加的位姿误差与位姿误差关联信息的关联关系,位姿误差关联信息包括:标度因数误差、车轮之间的距离的测量误差、车轮打滑引起的车轮行进的路程的误差;基于当前位姿采样时间段自动导引运输车的位姿误差,对当前位姿采样时间段的自动导引运输车的位姿进行校正。实现了在利用位姿误差模型消除诸如打滑误差的基础上,实时计算自动

基于单片机的智能车自动导航系统算法研究.docx
基于单片机的智能车自动导航系统算法研究基于单片机的智能车自动导航系统算法研究摘要:随着科技的不断发展,智能车技术成为了一个热门的研究方向。智能车自动导航是其中的一个重要应用,它能够使车辆能够在没有人为干预的情况下准确地完成导航任务。本论文主要研究基于单片机的智能车自动导航系统算法,通过分析和实验,提出了一种高效的算法来实现该系统。1.引言智能车自动导航技术旨在使车辆具备自主导航的能力,从而提高行驶的安全性和效率。基于单片机的智能车自动导航系统算法是该技术中的一个关键问题。本论文旨在通过研究和实验,提出一种