
一种汽车全方位防碰撞系统及其方法.pdf

一只****呀9

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种汽车全方位防碰撞系统及其方法.pdf
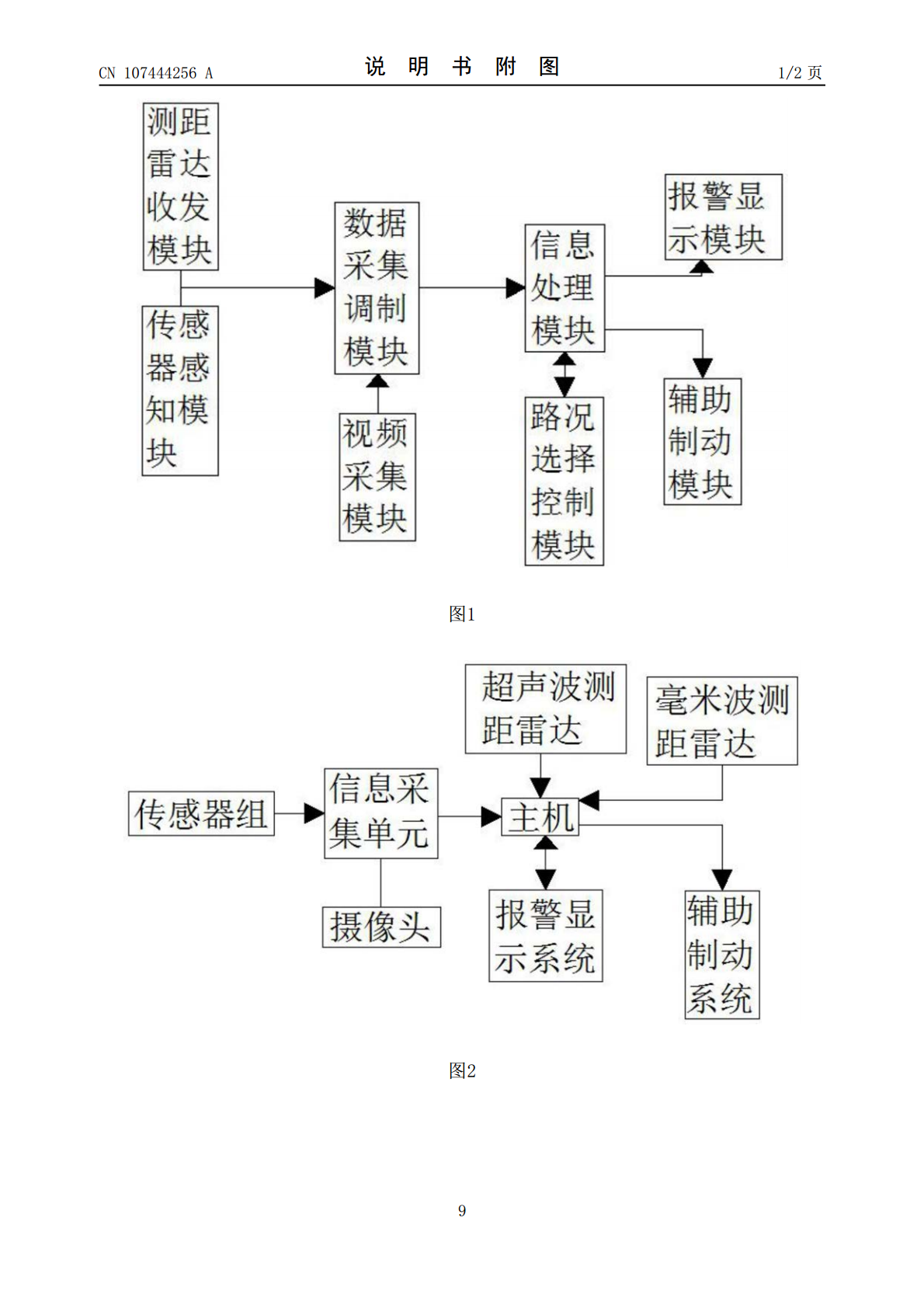
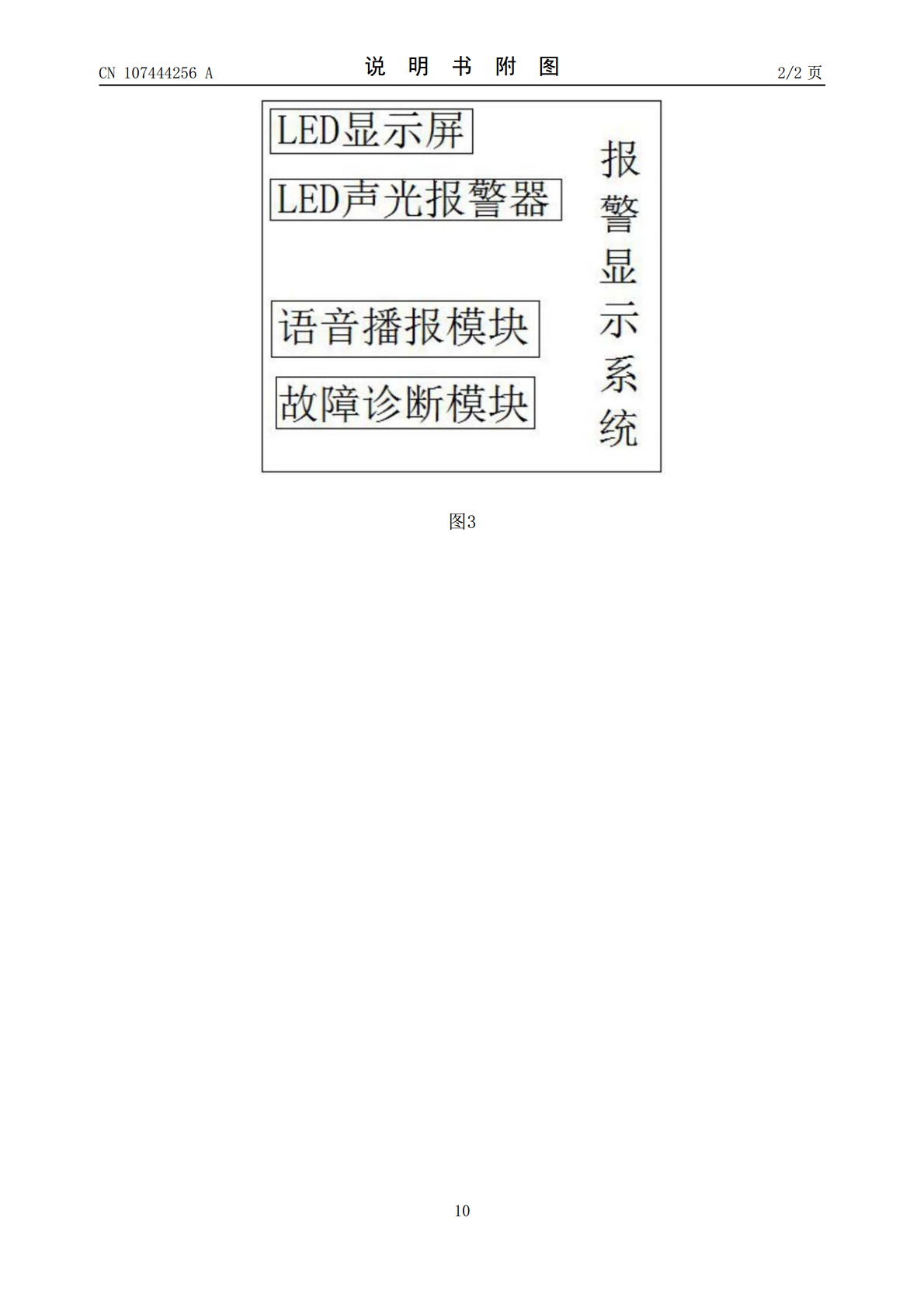
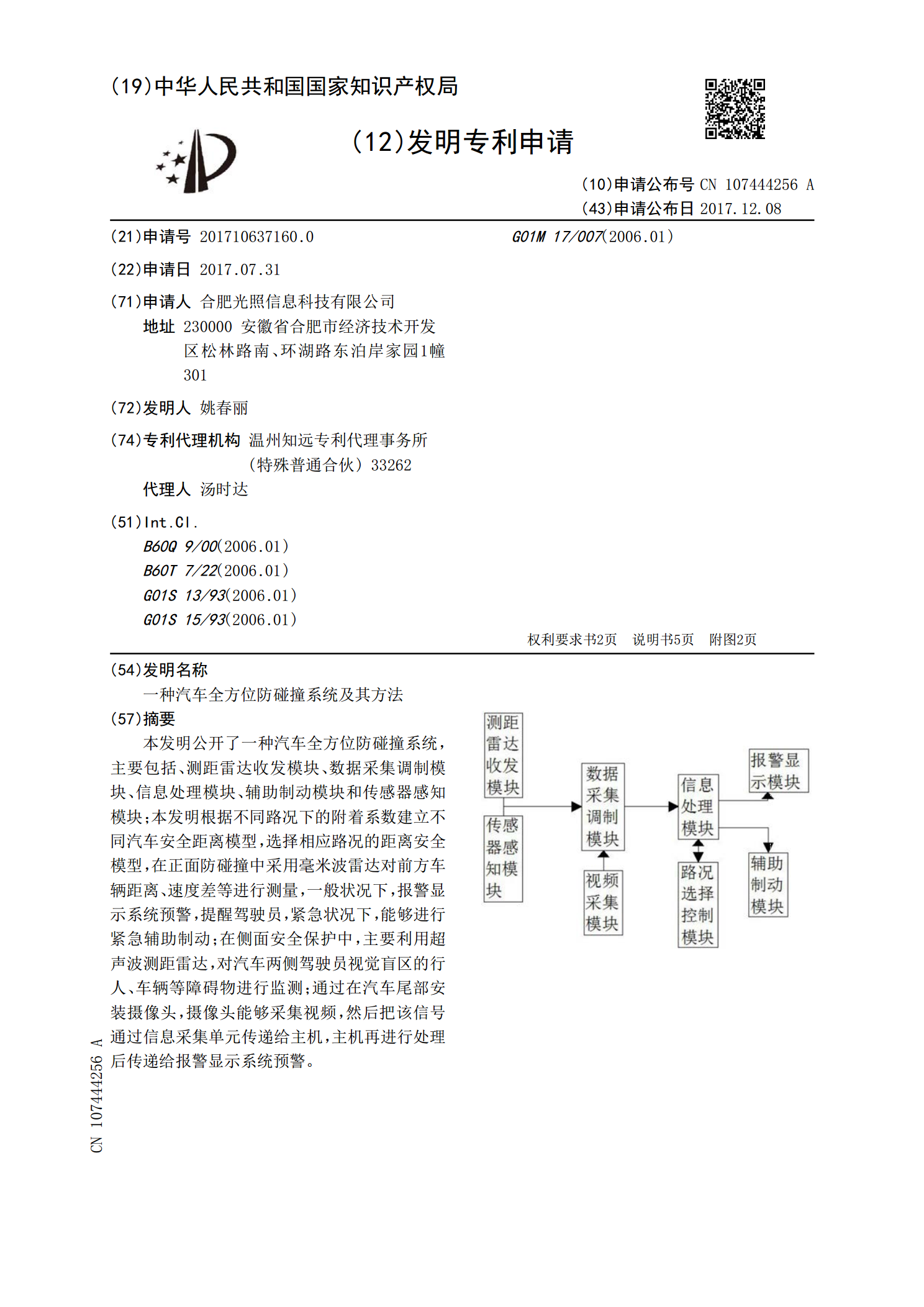
本发明公开了一种汽车全方位防碰撞系统,主要包括、测距雷达收发模块、数据采集调制模块、信息处理模块、辅助制动模块和传感器感知模块;本发明根据不同路况下的附着系数建立不同汽车安全距离模型,选择相应路况的距离安全模型,在正面防碰撞中采用毫米波雷达对前方车辆距离、速度差等进行测量,一般状况下,报警显示系统预警,提醒驾驶员,紧急状况下,能够进行紧急辅助制动;在侧面安全保护中,主要利用超声波测距雷达,对汽车两侧驾驶员视觉盲区的行人、车辆等障碍物进行监测;通过在汽车尾部安装摄像头,摄像头能够采集视频,然后把该信号通过信
车辆防碰撞系统、车辆及其防碰撞方法.pdf
本发明公开了一种车辆防碰撞系统,该车辆防碰撞系统包括正面检测装置、侧面检测装置、缓冲装置、预保护装置、报警装置和控制装置,其中,正面检测装置,用于检测车辆与前车和/或后车的相对行车信息;侧面检测装置,用于检测车辆侧面驾驶员视觉盲区内的障碍物信息;缓冲装置,用于在车辆发生碰撞时启动;控制装置根据相对行车信息和障碍物信息对缓冲装置、预保护装置和报警装置进行控制。该车辆防碰撞系统,可以实现主动保护和被动安全的防碰撞控制,更加完善。本发明还公开了一种车辆和车辆防碰撞方法。
一种焦炉机车的防碰撞系统及其防碰撞控制方法.pdf
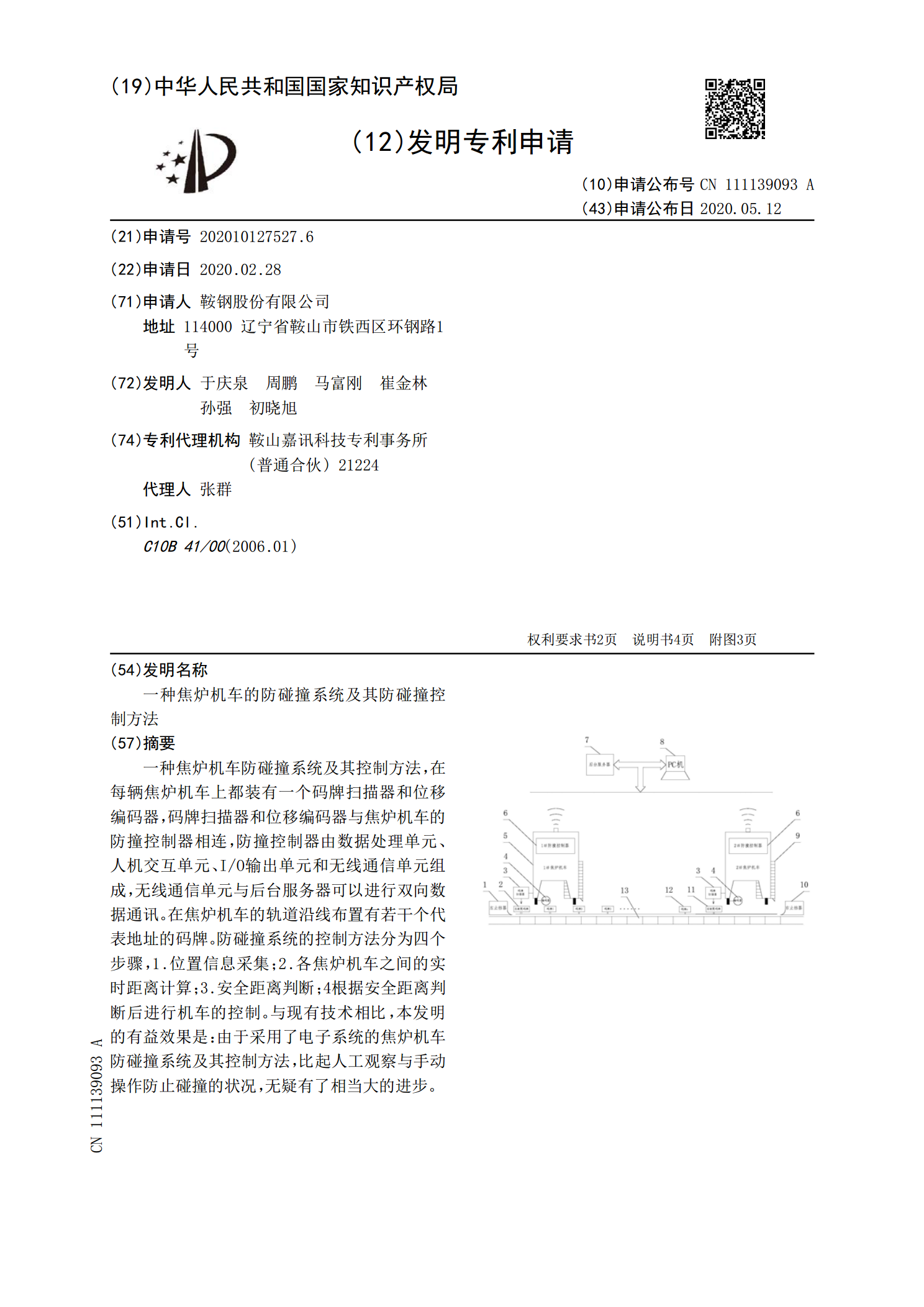
一种焦炉机车防碰撞系统及其控制方法,在每辆焦炉机车上都装有一个码牌扫描器和位移编码器,码牌扫描器和位移编码器与焦炉机车的防撞控制器相连,防撞控制器由数据处理单元、人机交互单元、I/O输出单元和无线通信单元组成,无线通信单元与后台服务器可以进行双向数据通讯。在焦炉机车的轨道沿线布置有若干个代表地址的码牌。防碰撞系统的控制方法分为四个步骤,1.位置信息采集;2.各焦炉机车之间的实时距离计算;3.安全距离判断;4根据安全距离判断后进行机车的控制。与现有技术相比,本发明的有益效果是:由于采用了电子系统的焦炉机车防

一种汽车防碰撞系统.pdf
本发明公开了一种汽车防碰撞系统,包括安装在汽车车身上的雷达测距装置、安装在汽车车门内的缓冲气囊和安装在汽车内的控制装置,所述雷达测距装置安装设置在车头部、车尾部、汽车中部的左右两侧,所述汽车车门包括车门本体、防撞梁和内饰板,所述防撞梁上具有多个凸耳,所述凸耳均具有安装孔,所述缓冲气囊通过螺栓固定在凸耳上,所述控制装置内设置有微处理器、液晶显示器和报警蜂鸣器,所述微处理器的输入端与雷达测距装置的输出端电相连,所述微处理器的输出端与报警蜂鸣器和缓冲气囊的输入端相连。本发明的优点在于:一种汽车防碰撞系统的防护功

一种主动式轨道车辆防碰撞系统及其防碰撞方法.pdf
一种主动式轨道车辆防碰撞系统及其防碰撞方法,该系统的实施依靠车载主机、驱动装置和断路装置三部分,车载主机控制驱动装置和断路装置运行,发射、处理和分析测距信号;断路装置控制轨道车辆的轮轴两端的连通状态;驱动装置用来驱动轨道车辆的运行,根据车载主机的命令实现轨道车辆的加速、减速、制动和启动。本发明系统能够精确测量出前后两列轨道车辆的相对轨道距离,并能够进行防碰撞预测,调节轨道车辆的运行参数,有效且主动避免轨道车辆发生碰撞事故。