
一种基于触觉反馈的智能导盲机器人及其工作方法.pdf

慧红****ad

1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于触觉反馈的智能导盲机器人及其工作方法.pdf
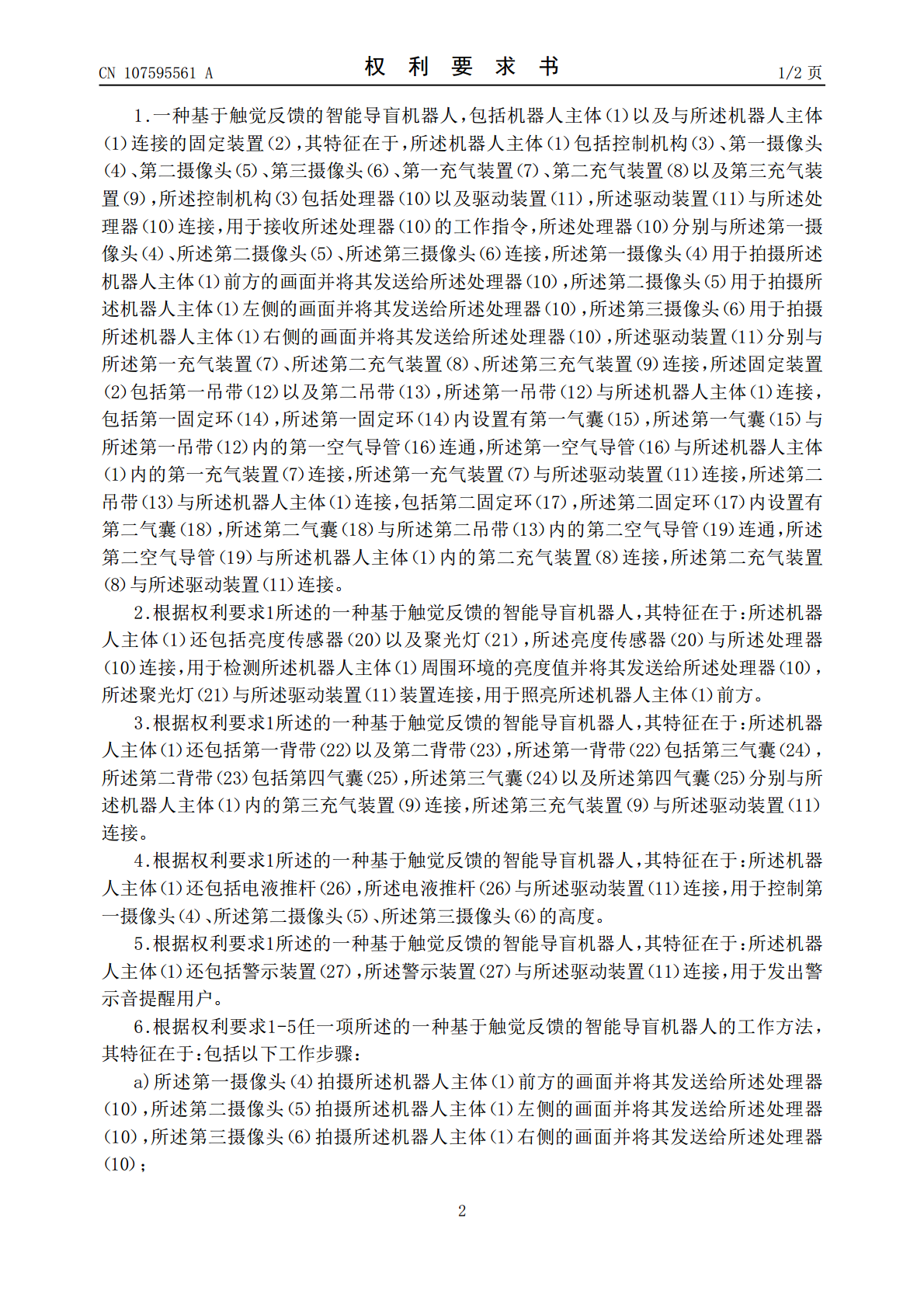
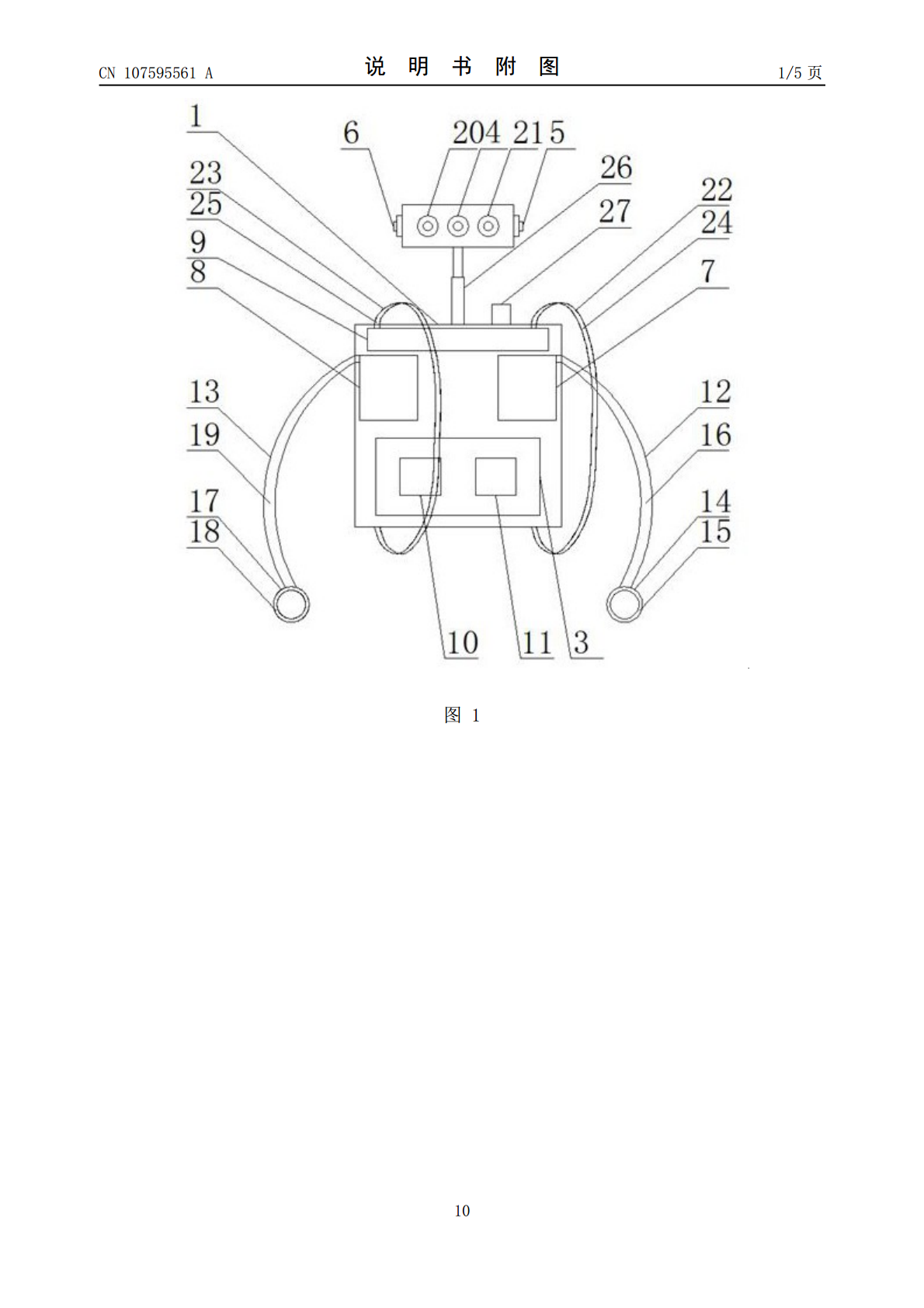
本发明公开了一种基于触觉反馈的智能导盲机器人,机器人主体包括控制机构、第一充气装置、第二充气装置以及第三充气装置,控制机构包括处理器以及驱动装置,驱动装置与处理器连接,驱动装置分别与第一充气装置、第二充气装置、第三充气装置连接,固定装置包括第一吊带以及第二吊带,第一吊带包括第一固定环,第一固定环内设置有第一气囊,第一气囊与第一吊带内的第一空气导管连通,第一空气导管与机器人主体内的第一充气装置连接,第一充气装置与驱动装置连接,第二吊带包括第二固定环,第二固定环内设置有第二气囊,第二气囊与第二吊带内的第二空气
一种基于数据分析的智能共享导盲机器人及其工作方法.pdf
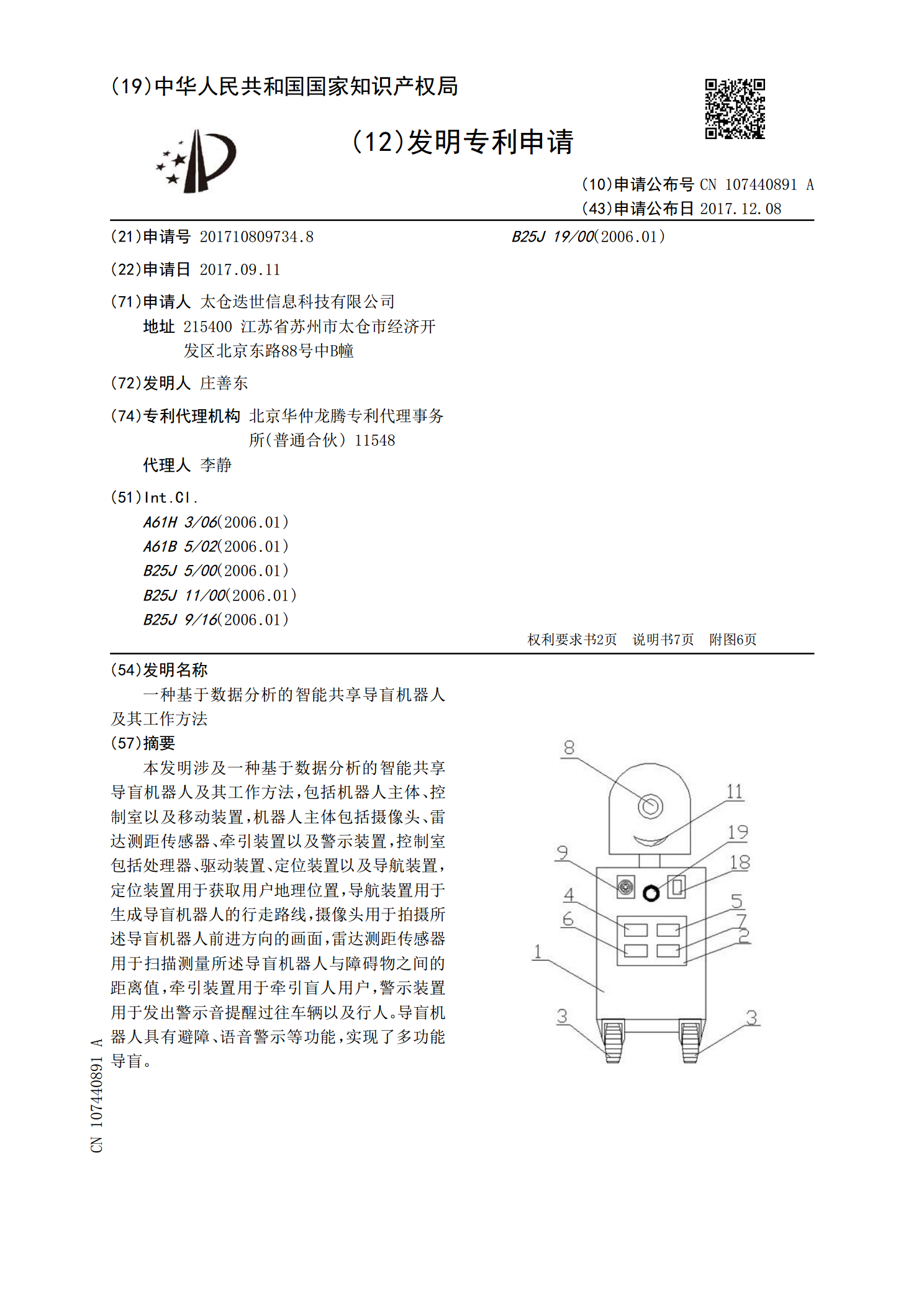
本发明涉及一种基于数据分析的智能共享导盲机器人及其工作方法,包括机器人主体、控制室以及移动装置,机器人主体包括摄像头、雷达测距传感器、牵引装置以及警示装置,控制室包括处理器、驱动装置、定位装置以及导航装置,定位装置用于获取用户地理位置,导航装置用于生成导盲机器人的行走路线,摄像头用于拍摄所述导盲机器人前进方向的画面,雷达测距传感器用于扫描测量所述导盲机器人与障碍物之间的距离值,牵引装置用于牵引盲人用户,警示装置用于发出警示音提醒过往车辆以及行人。导盲机器人具有避障、语音警示等功能,实现了多功能导盲。
智能导盲装置及其工作方法.pdf
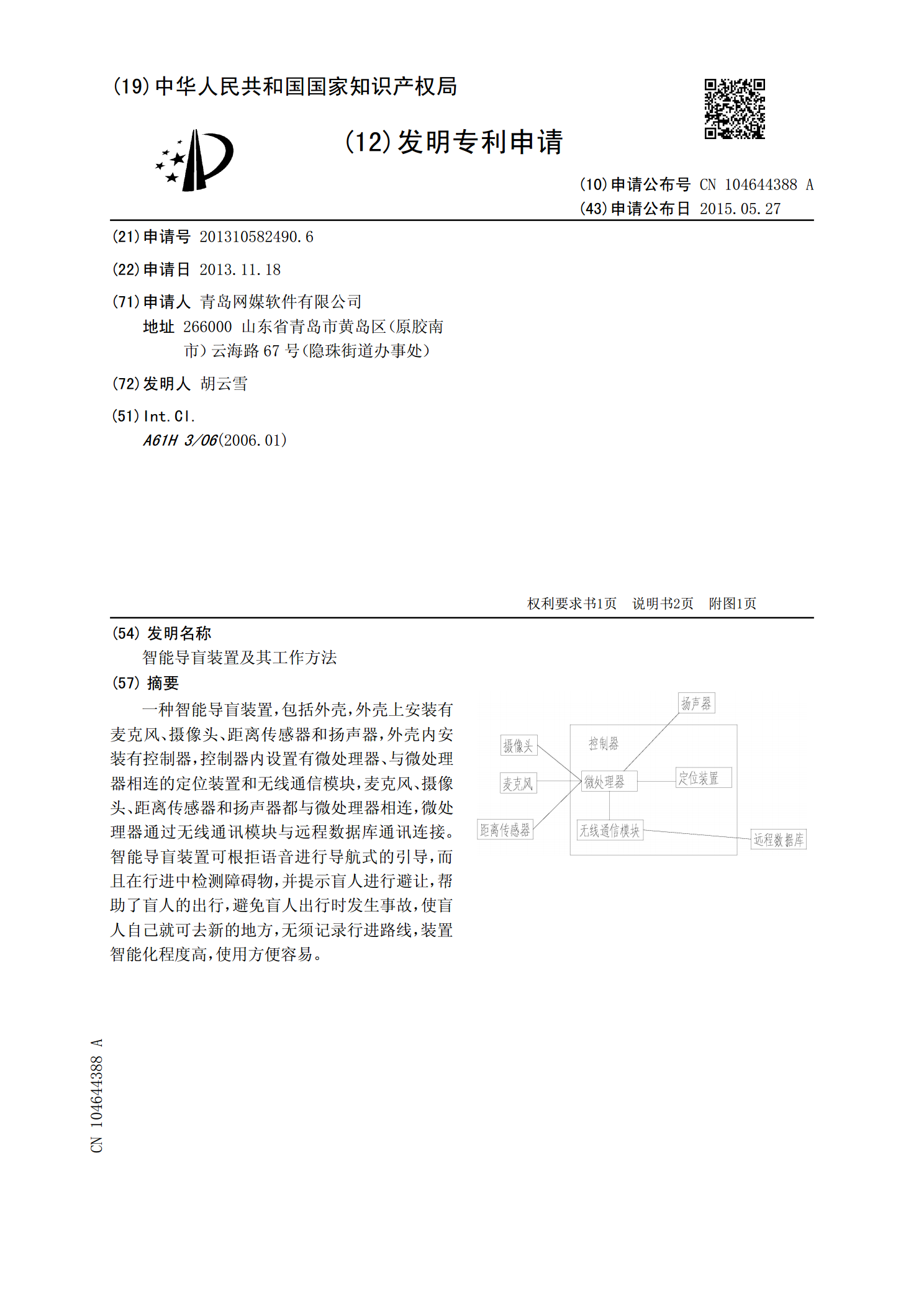
一种智能导盲装置,包括外壳,外壳上安装有麦克风、摄像头、距离传感器和扬声器,外壳内安装有控制器,控制器内设置有微处理器、与微处理器相连的定位装置和无线通信模块,麦克风、摄像头、距离传感器和扬声器都与微处理器相连,微处理器通过无线通讯模块与远程数据库通讯连接。智能导盲装置可根拒语音进行导航式的引导,而且在行进中检测障碍物,并提示盲人进行避让,帮助了盲人的出行,避免盲人出行时发生事故,使盲人自己就可去新的地方,无须记录行进路线,装置智能化程度高,使用方便容易。

一种智能化导盲机器人及其导盲方法.pdf
一种智能化导盲机器人,包括车体、驱动轮、雷达模块、相机模块及导盲连接杆;车体内部有智能化导盲机器人控制单元;其导盲方法中采用视觉ORB‑SLAM的方式来对未知环境进行建图,利用三维点云信息来描述未知场景的地图信息;点云信息更加丰富,更有益于导盲机器人在未知环境中精确地定位。可以更加精确地对室外的交通信号灯,行人等目标进行识别定位,可以进一步地提升盲人的出行安全问题;结构简单,方便实用,实用性强。

一种基于机器人的智能导盲警示方法及其系统.pdf
一种基于机器人的智能导盲警示方法,所述方法包括以下步骤:处理装置检测机器人是否有通过连接装置与手杖连接;若有则控制机器人按照预设速度进行行走并利用摄像头实时摄取前方的环境影像分析前方是否有汽车行驶;若有则摄像头实时摄取汽车影像并根据其分析汽车是否会与盲人发生碰撞;若会则处理装置向汽车中控发送连接请求并检测是否有连接完成;若有则处理装置控制车内扬声器发送警报信息并控制摄像头摄取汽车侧方的影像并根据其分析汽车侧方是否有其他汽车行驶;若未有则处理装置控制机器人向侧方预设角度进行匀速拉伸并检测机器人进行拉伸的拉力