
一种智能化导盲机器人及其导盲方法.pdf

一条****丹淑

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能化导盲机器人及其导盲方法.pdf
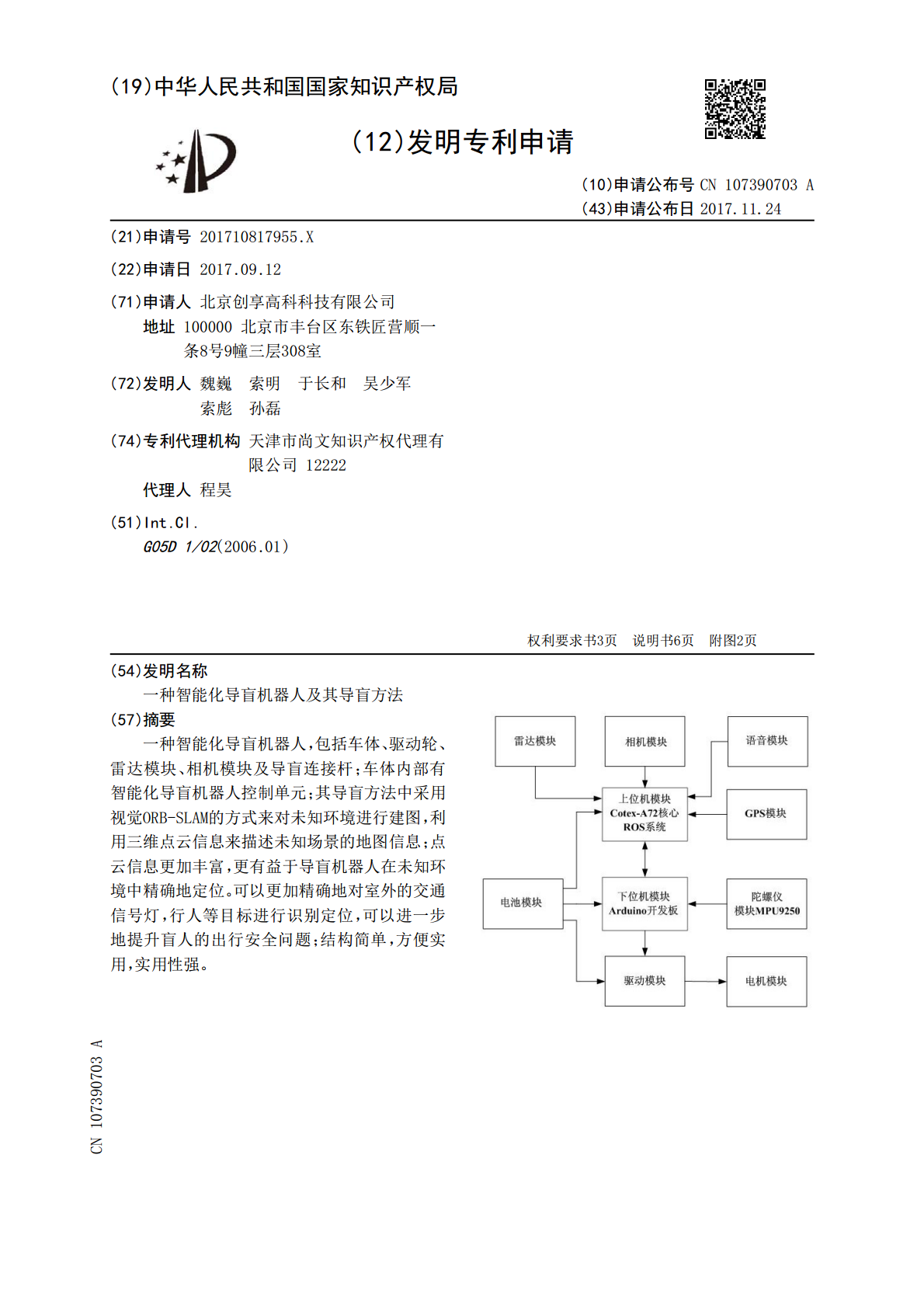
一种智能化导盲机器人,包括车体、驱动轮、雷达模块、相机模块及导盲连接杆;车体内部有智能化导盲机器人控制单元;其导盲方法中采用视觉ORB‑SLAM的方式来对未知环境进行建图,利用三维点云信息来描述未知场景的地图信息;点云信息更加丰富,更有益于导盲机器人在未知环境中精确地定位。可以更加精确地对室外的交通信号灯,行人等目标进行识别定位,可以进一步地提升盲人的出行安全问题;结构简单,方便实用,实用性强。
一种导盲机器人及导盲系统、导盲方法.pdf
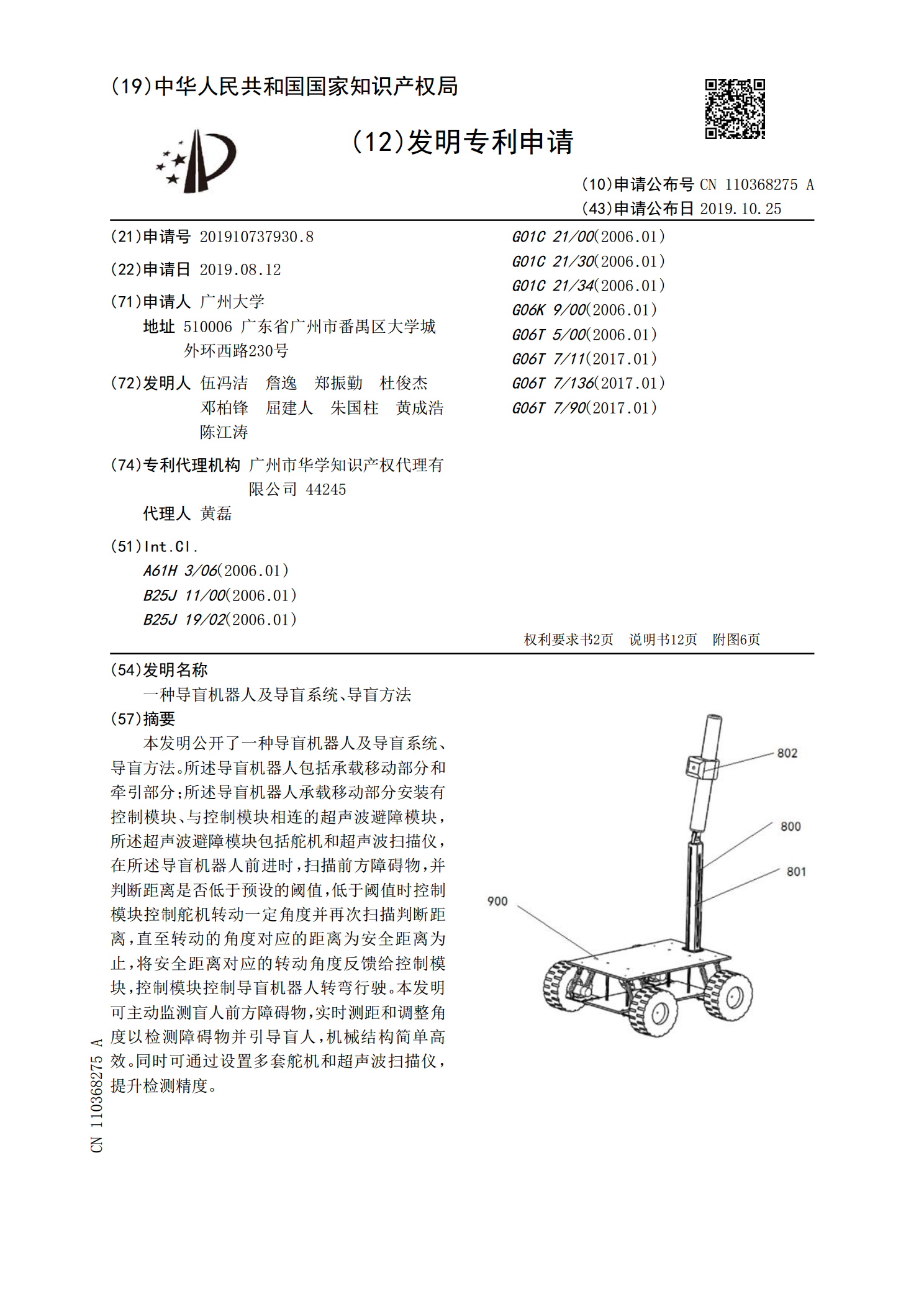
本发明公开了一种导盲机器人及导盲系统、导盲方法。所述导盲机器人包括承载移动部分和牵引部分;所述导盲机器人承载移动部分安装有控制模块、与控制模块相连的超声波避障模块,所述超声波避障模块包括舵机和超声波扫描仪,在所述导盲机器人前进时,扫描前方障碍物,并判断距离是否低于预设的阈值,低于阈值时控制模块控制舵机转动一定角度并再次扫描判断距离,直至转动的角度对应的距离为安全距离为止,将安全距离对应的转动角度反馈给控制模块,控制模块控制导盲机器人转弯行驶。本发明可主动监测盲人前方障碍物,实时测距和调整角度以检测障碍物并

一种导盲杖及其导盲方法.pdf
本申请实施例公开了一种导盲杖及其导盲方法,其中导盲杖包括:杖体、编码模块和检测模块;检测模块和编码模块均设置于杖体上;检测模块包括摄像头、微处理器和供电装置;摄像头与微处理器通信连接;编码模块包括编码磁吸开关;微处理器与编码磁吸开关通信连接。上述导盲杖通过将检测到的障碍物以图形组合的方式呈现,盲人触摸并感受编码器的变化能够快速的对周围障碍物进行判断,充分利用了盲人敏锐的触觉,解决了现有导盲杖无法及时且安全的传达障碍物信息的问题。

一种智能导盲杖及其导盲方法.pdf
本发明公开一种智能导盲杖及其导盲方法,包括把手部、连接于把手部一端的伸缩部以及连接于伸缩部一端的触地部;所述把手部设有控制模块、超声波测距模块以及震动模块,所述控制模块与超声波测距模块电性连接,所述震动模块与控制模块电性连接。本发明通过超声波测距可以远距离探测使用者行走路径周围是否存在障碍物;当探测到障碍物时,可以通过震动的方式及时反馈给使用者,提醒使用者进行躲避;当出现应急情况时,可以通过拨号呼叫进行紧急呼叫,及时有效地联系家人。
室外导盲模块、导盲装置及其导盲方法.pdf
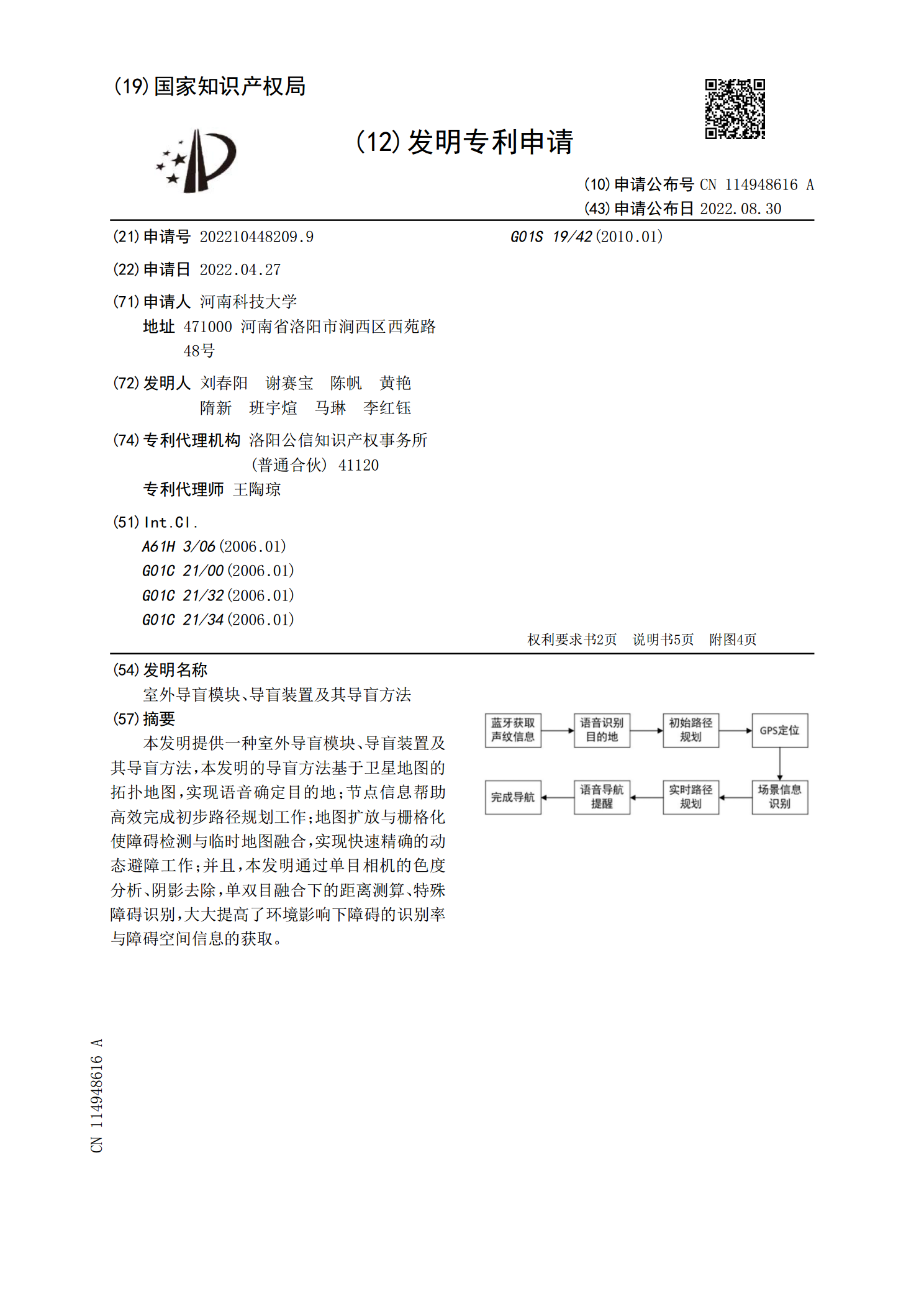
本发明提供一种室外导盲模块、导盲装置及其导盲方法,本发明的导盲方法基于卫星地图的拓扑地图,实现语音确定目的地;节点信息帮助高效完成初步路径规划工作;地图扩放与栅格化使障碍检测与临时地图融合,实现快速精确的动态避障工作;并且,本发明通过单目相机的色度分析、阴影去除,单双目融合下的距离测算、特殊障碍识别,大大提高了环境影响下障碍的识别率与障碍空间信息的获取。