
一种基于轮毂电机的管廊巡检小车全方位转向系统.pdf

猫巷****志敏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于轮毂电机的管廊巡检小车全方位转向系统.pdf
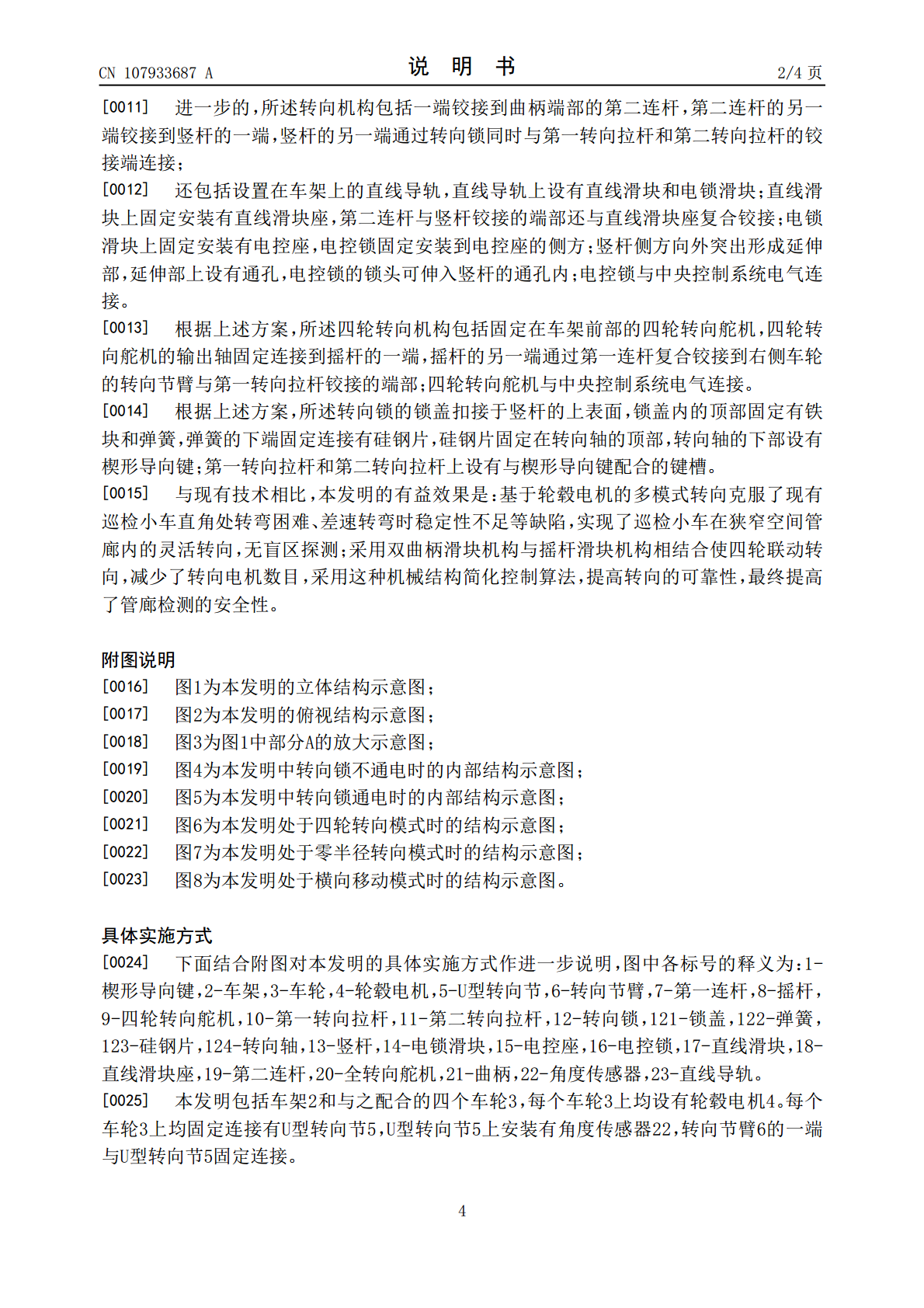
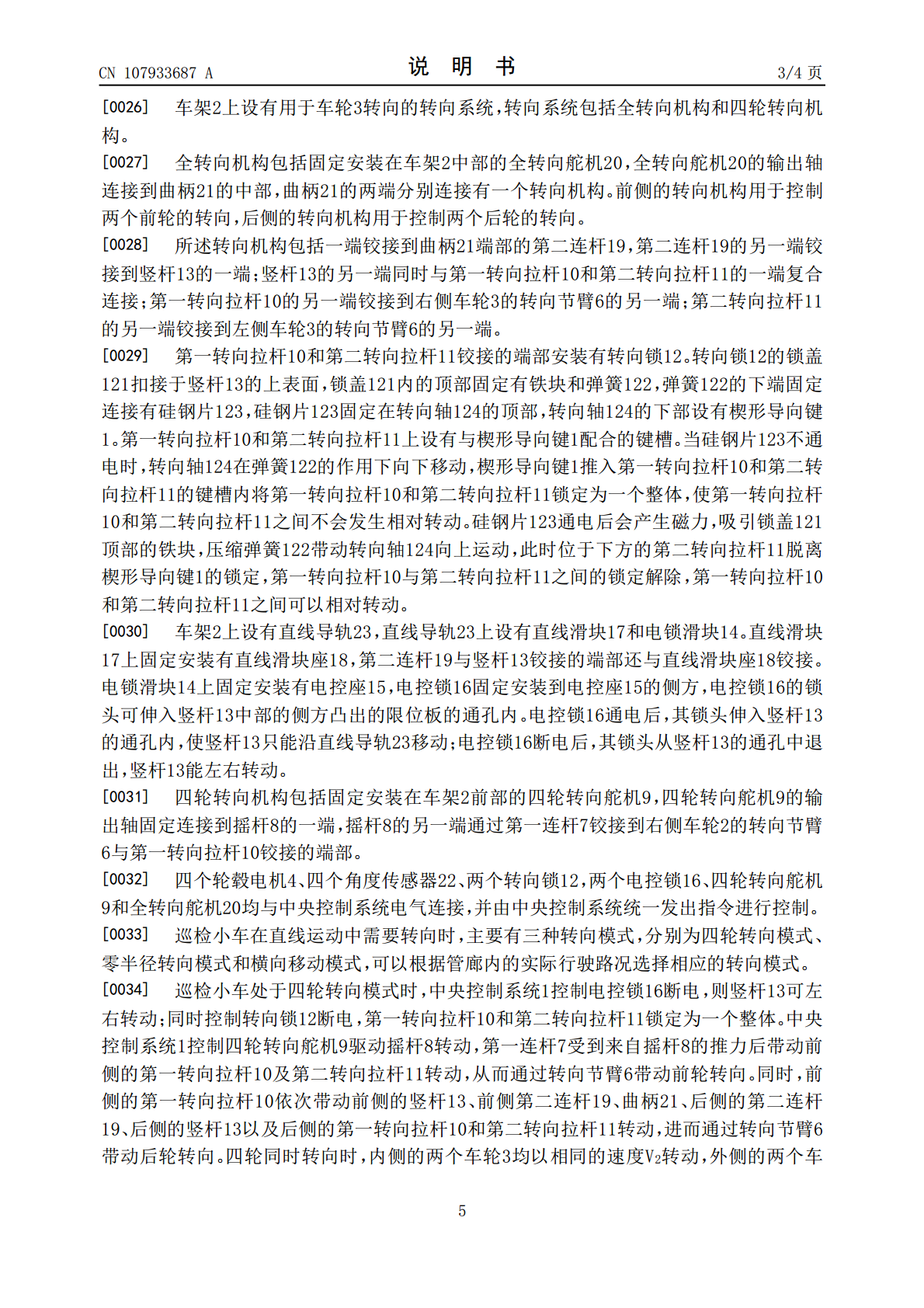
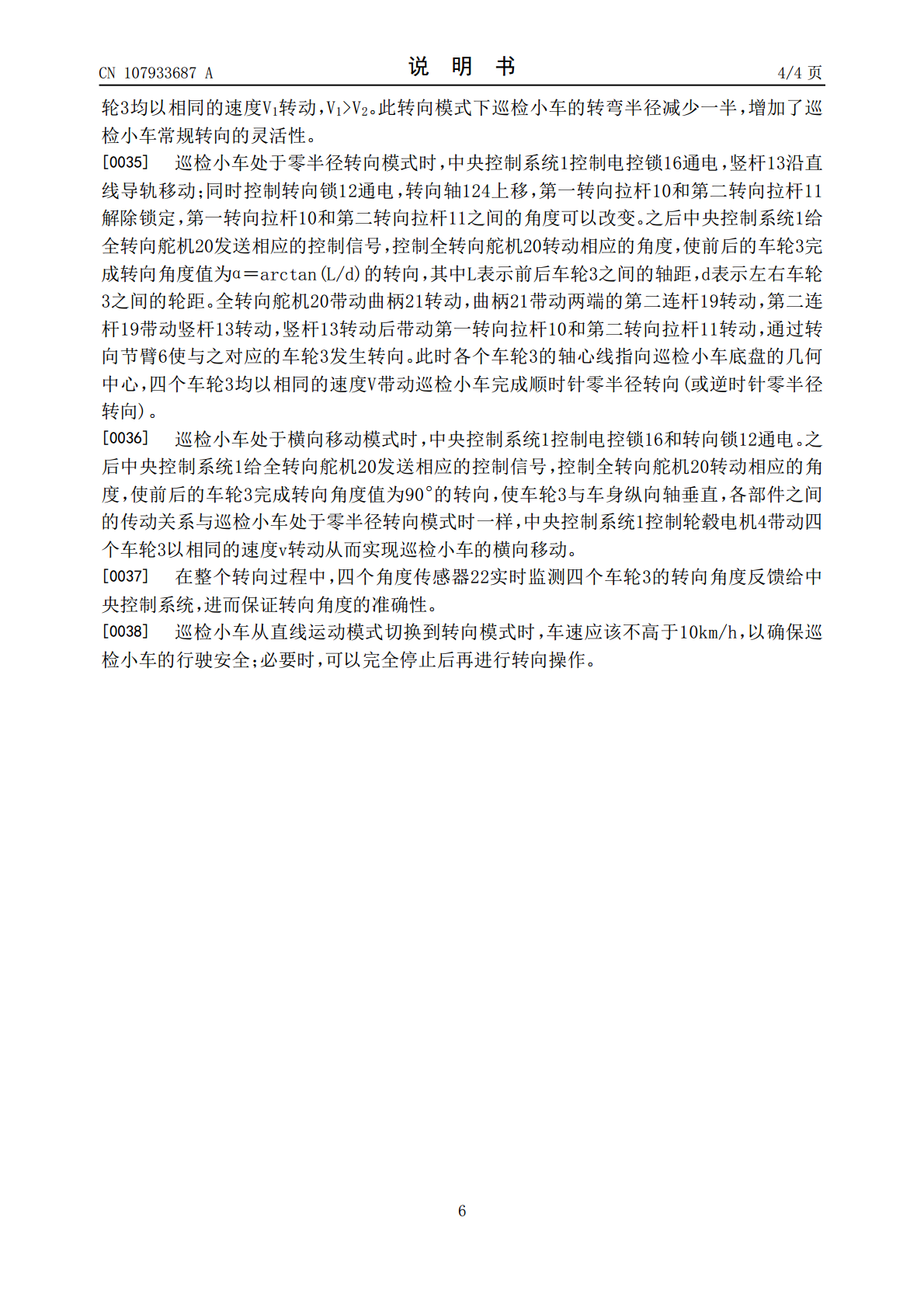
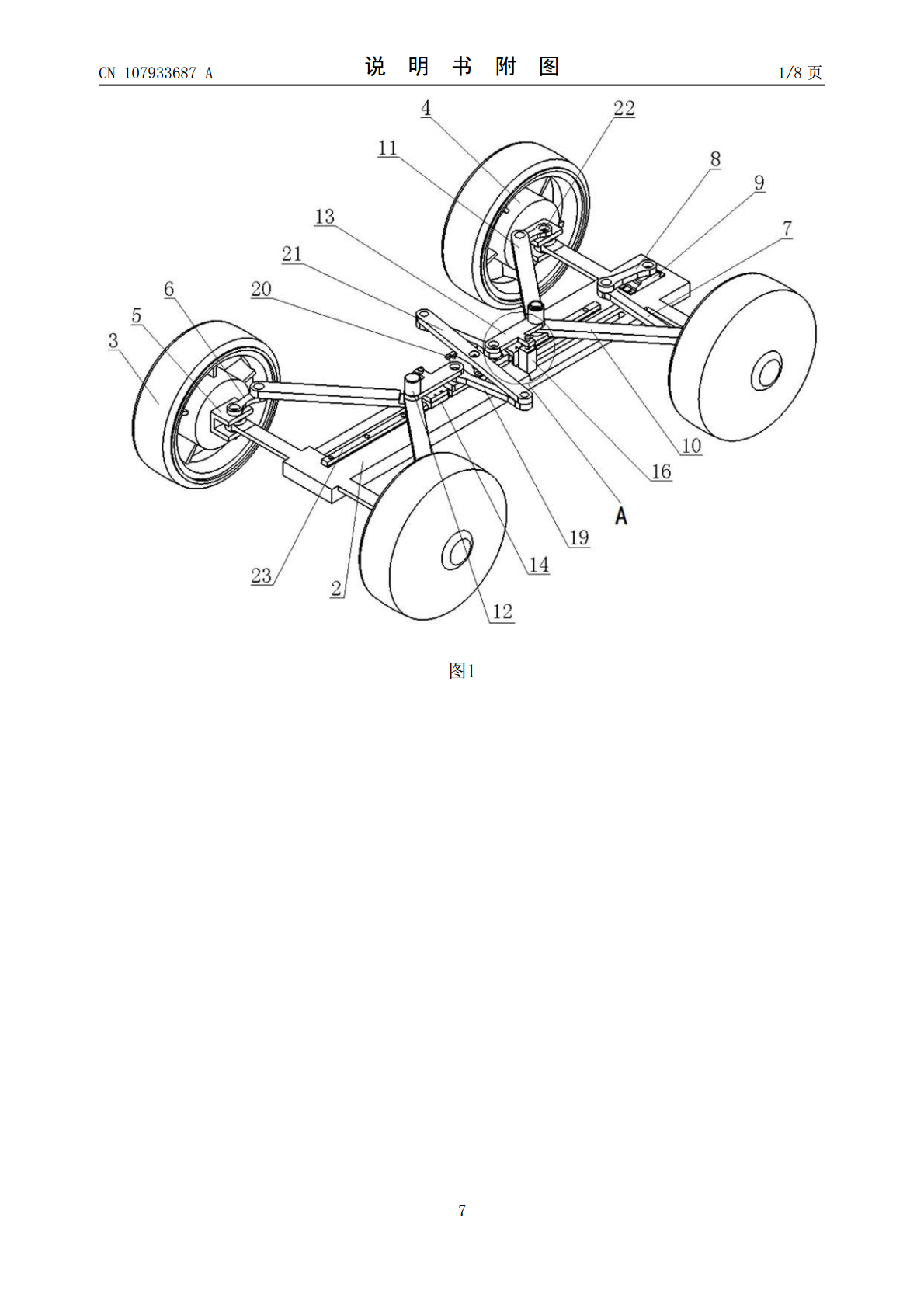
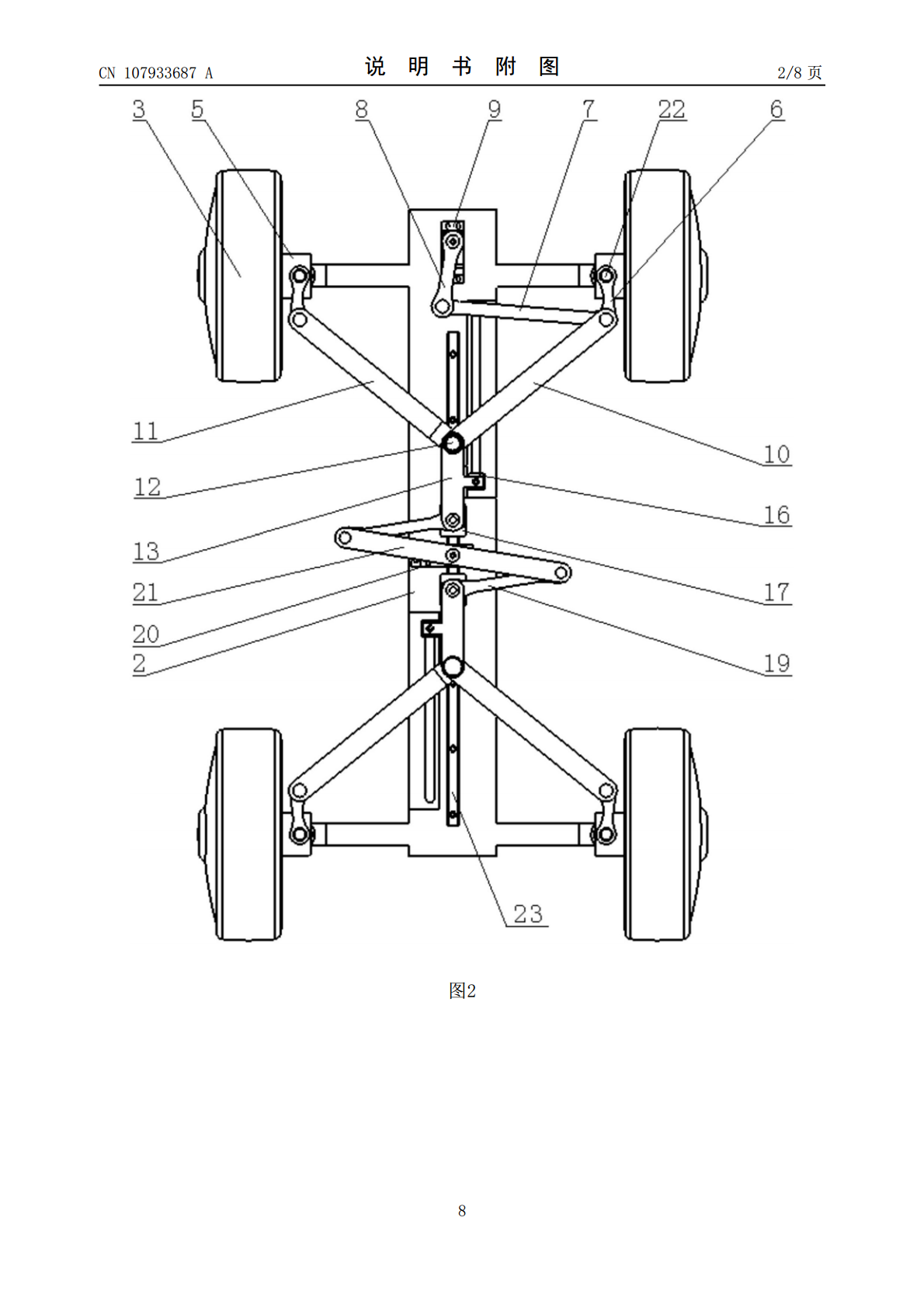
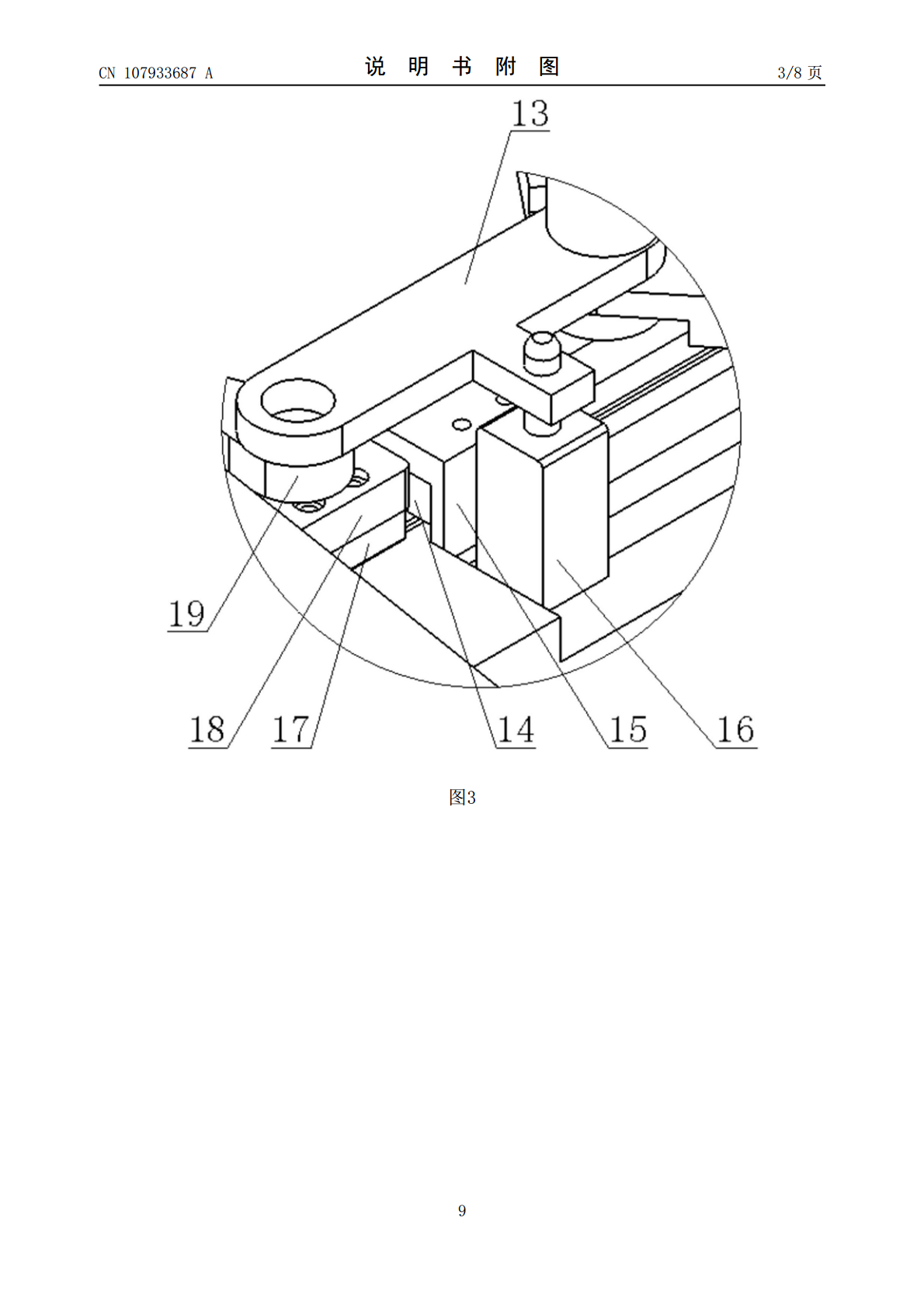
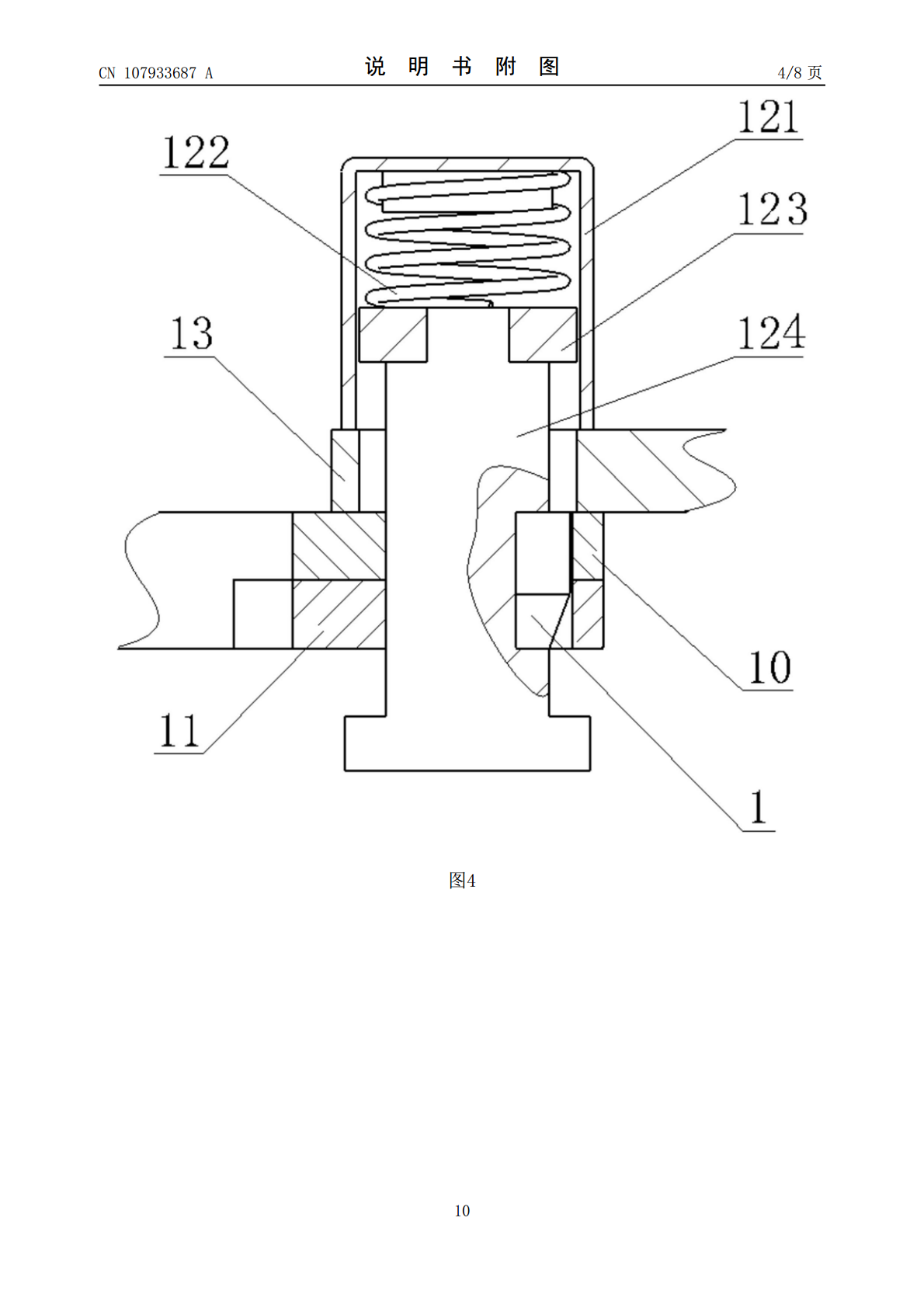
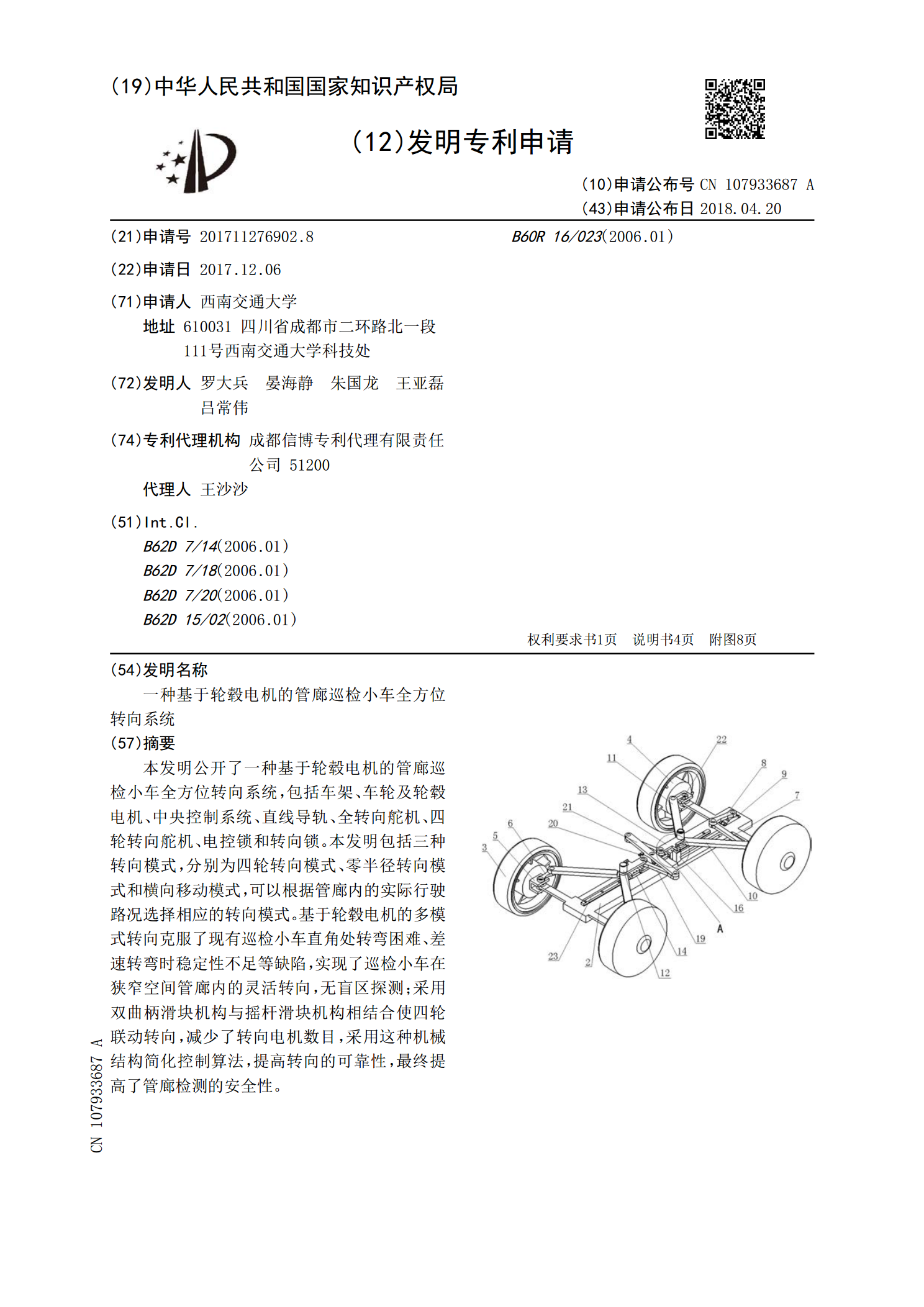
本发明公开了一种基于轮毂电机的管廊巡检小车全方位转向系统,包括车架、车轮及轮毂电机、中央控制系统、直线导轨、全转向舵机、四轮转向舵机、电控锁和转向锁。本发明包括三种转向模式,分别为四轮转向模式、零半径转向模式和横向移动模式,可以根据管廊内的实际行驶路况选择相应的转向模式。基于轮毂电机的多模式转向克服了现有巡检小车直角处转弯困难、差速转弯时稳定性不足等缺陷,实现了巡检小车在狭窄空间管廊内的灵活转向,无盲区探测;采用双曲柄滑块机构与摇杆滑块机构相结合使四轮联动转向,减少了转向电机数目,采用这种机械结构简化控制
一种基于轮毂电机的电动汽车全方位转向系统.pdf
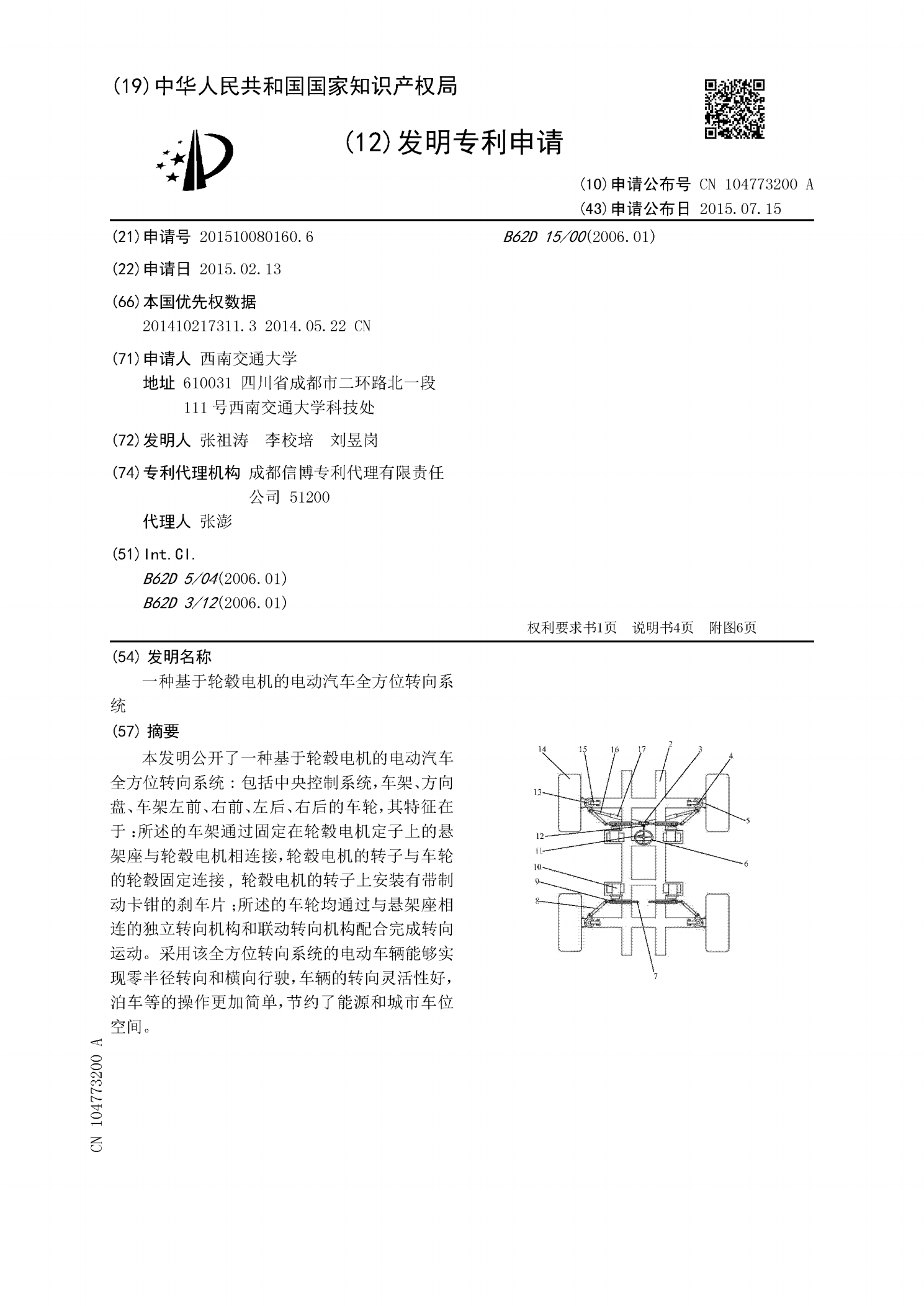
本发明公开了一种基于轮毂电机的电动汽车全方位转向系统:包括中央控制系统,车架、方向盘、车架左前、右前、左后、右后的车轮,其特征在于:所述的车架通过固定在轮毂电机定子上的悬架座与轮毂电机相连接,轮毂电机的转子与车轮的轮毂固定连接,轮毂电机的转子上安装有带制动卡钳的刹车片;所述的车轮均通过与悬架座相连的独立转向机构和联动转向机构配合完成转向运动。采用该全方位转向系统的电动车辆能够实现零半径转向和横向行驶,车辆的转向灵活性好,泊车等的操作更加简单,节约了能源和城市车位空间。

一种管廊巡检机器人巡检系统及方法.pdf
本发明提供一种管廊巡检机器人巡检系统及方法,所述综合管廊巡检机器人巡检系统包括:机器人本体、展示层、数据层、应用层、感知层;解决了由于管廊长度长,在采集图像时需要实时调整自己的监控角度,同时保证巡检快速,全面,准确。
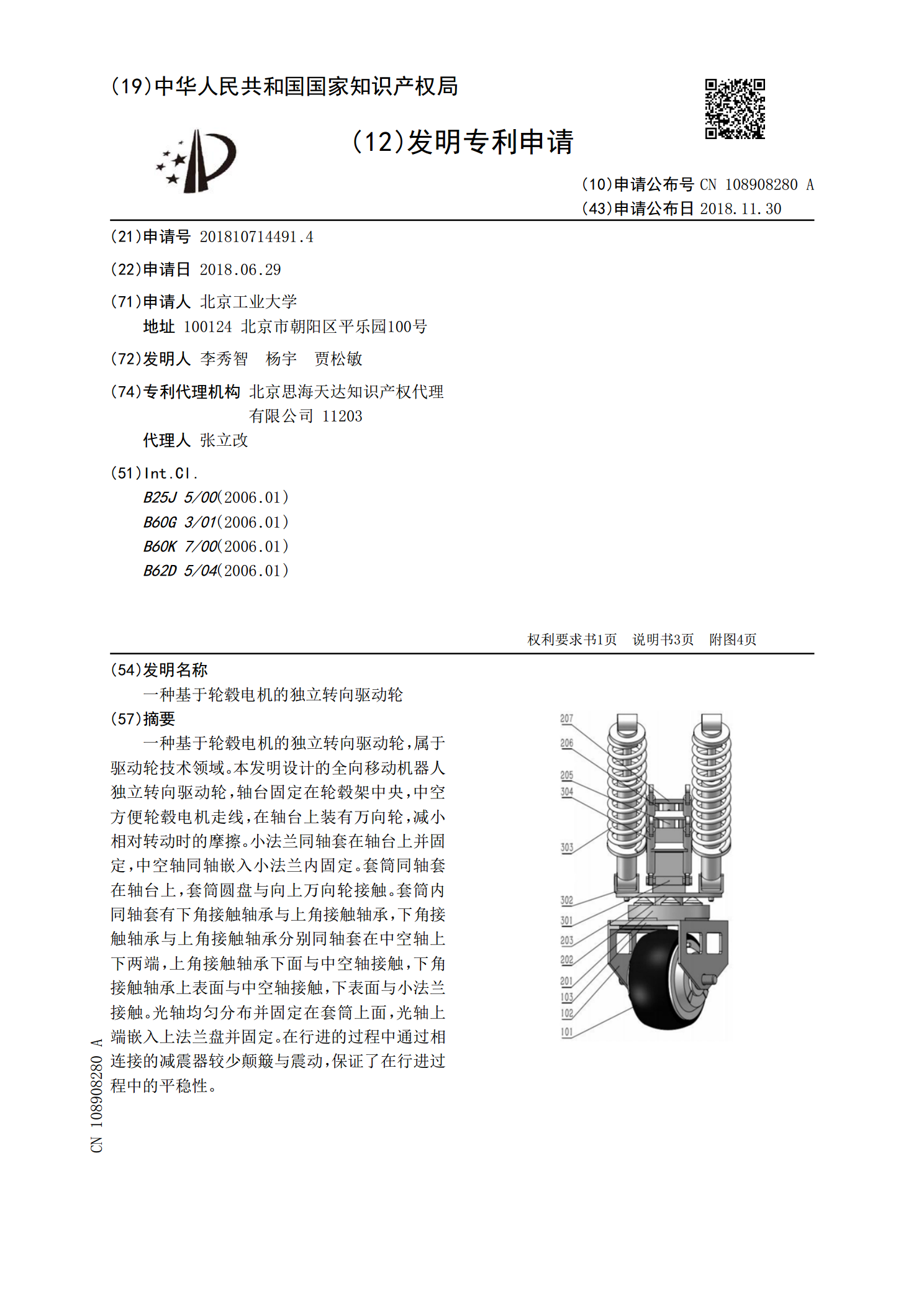
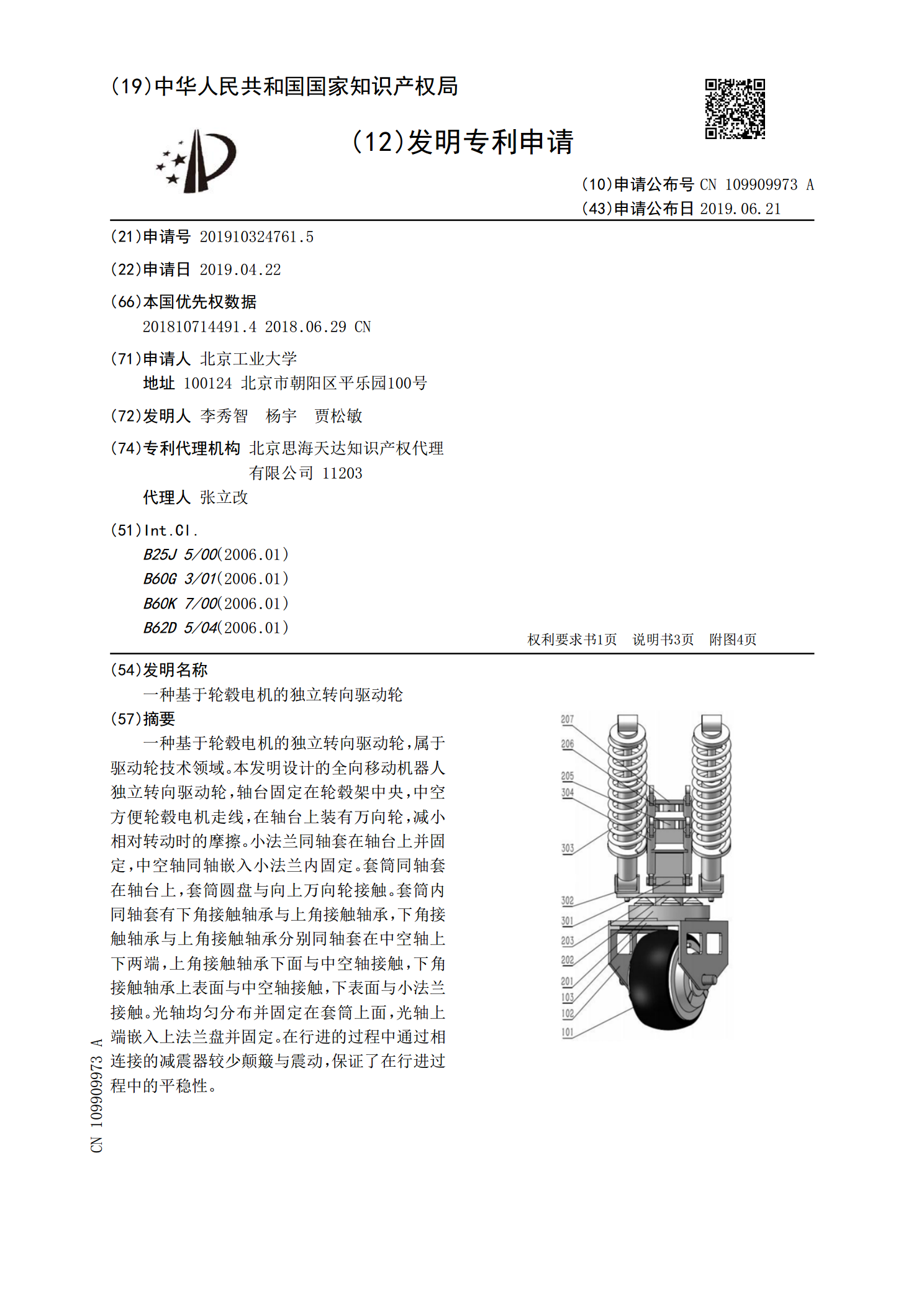
一种基于轮毂电机的独立转向驱动轮.pdf
一种基于轮毂电机的独立转向驱动轮,属于驱动轮技术领域。本发明设计的全向移动机器人独立转向驱动轮,轴台固定在轮毂架中央,中空方便轮毂电机走线,在轴台上装有万向轮,减小相对转动时的摩擦。小法兰同轴套在轴台上并固定,中空轴同轴嵌入小法兰内固定。套筒同轴套在轴台上,套筒圆盘与向上万向轮接触。套筒内同轴套有下角接触轴承与上角接触轴承,下角接触轴承与上角接触轴承分别同轴套在中空轴上下两端,上角接触轴承下面与中空轴接触,下角接触轴承上表面与中空轴接触,下表面与小法兰接触。光轴均匀分布并固定在套筒上面,光轴上端嵌入上法兰
一种基于轮毂电机的独立转向驱动轮.pdf
一种基于轮毂电机的独立转向驱动轮,属于驱动轮技术领域。本发明设计的全向移动机器人独立转向驱动轮,轴台固定在轮毂架中央,中空方便轮毂电机走线,在轴台上装有万向轮,减小相对转动时的摩擦。小法兰同轴套在轴台上并固定,中空轴同轴嵌入小法兰内固定。套筒同轴套在轴台上,套筒圆盘与向上万向轮接触。套筒内同轴套有下角接触轴承与上角接触轴承,下角接触轴承与上角接触轴承分别同轴套在中空轴上下两端,上角接触轴承下面与中空轴接触,下角接触轴承上表面与中空轴接触,下表面与小法兰接触。光轴均匀分布并固定在套筒上面,光轴上端嵌入上法兰