
一种腰力回转驱动行走装置.pdf

醉香****mm

1/9
2/9

3/9

4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种腰力回转驱动行走装置.pdf
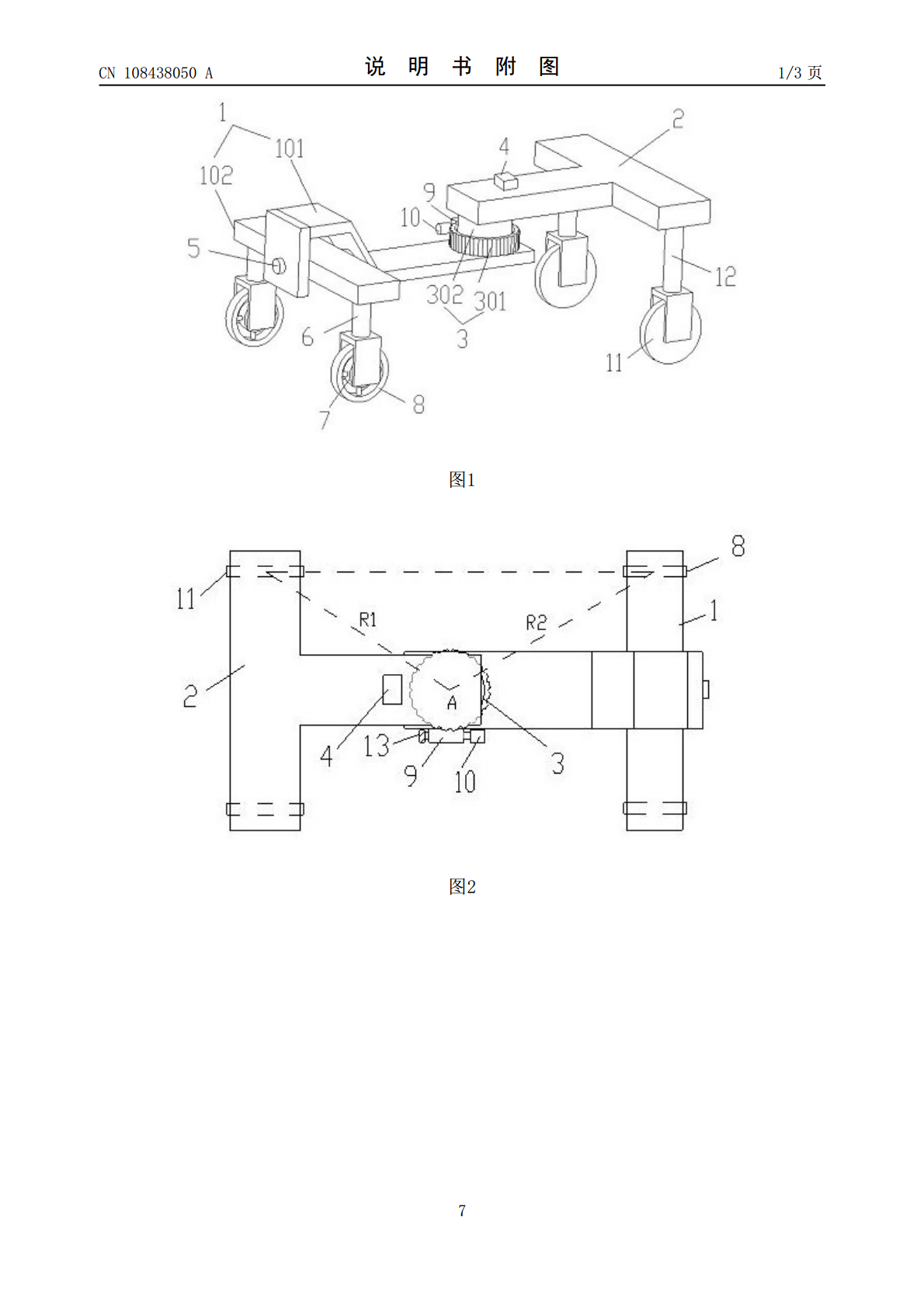
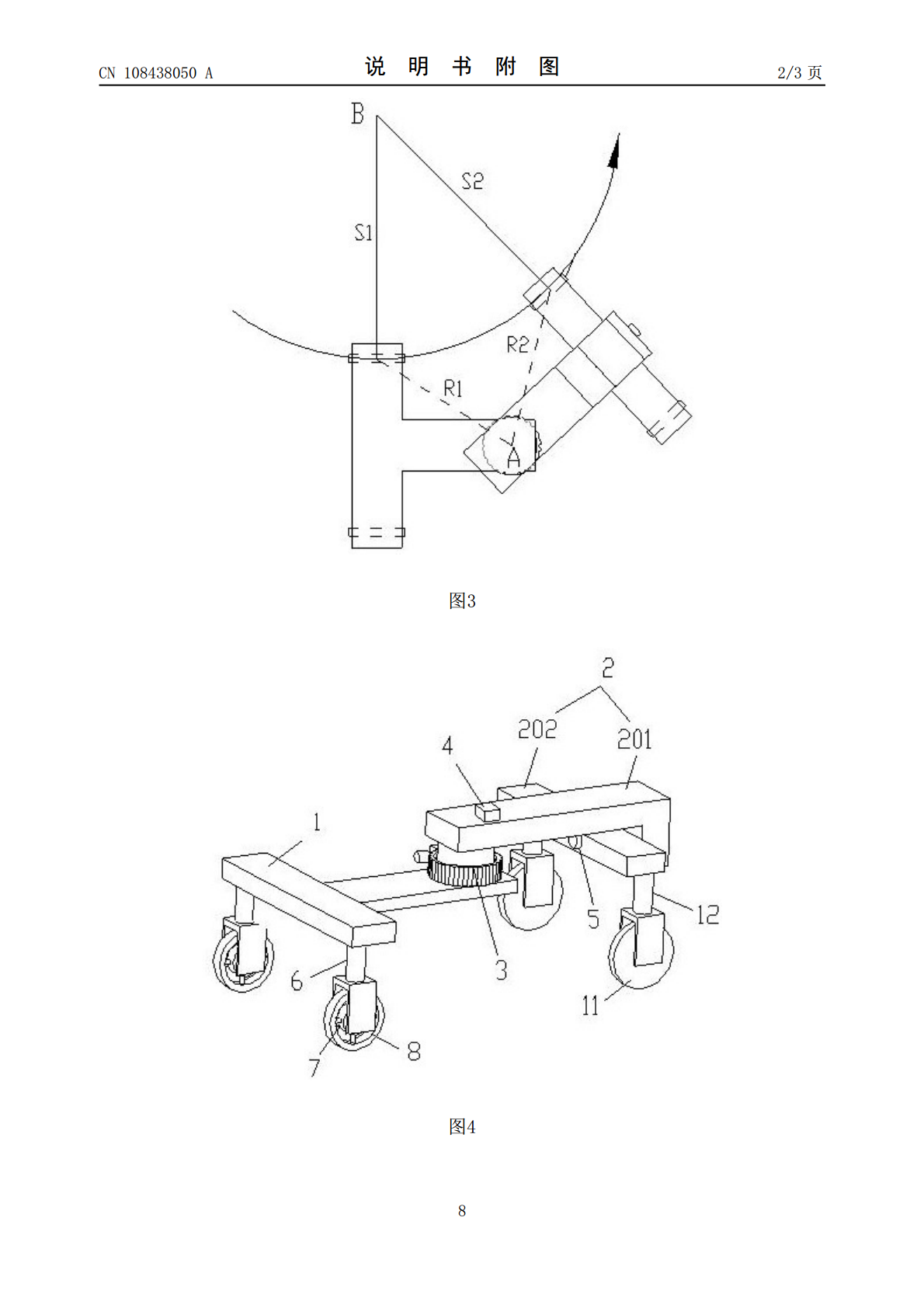
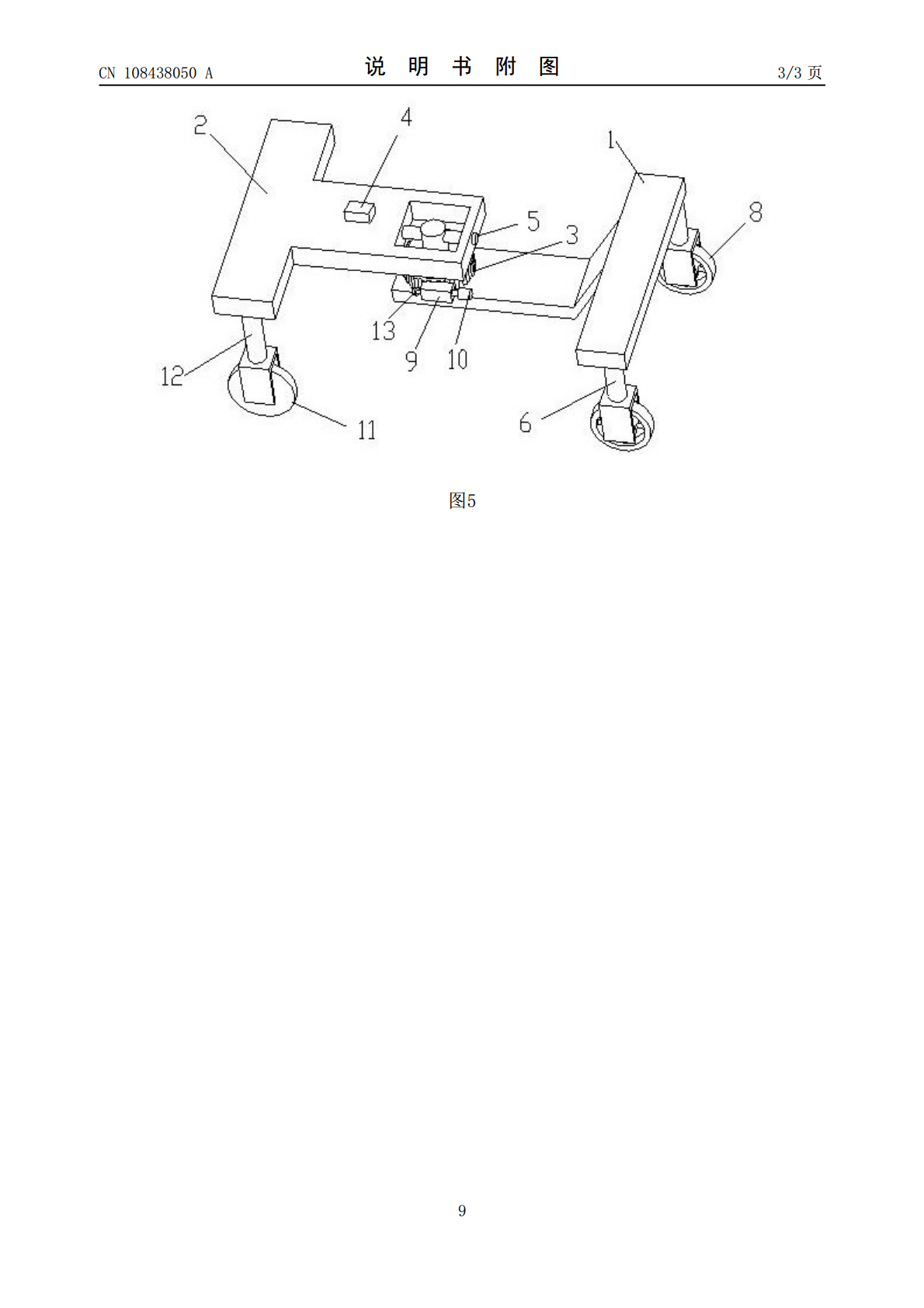
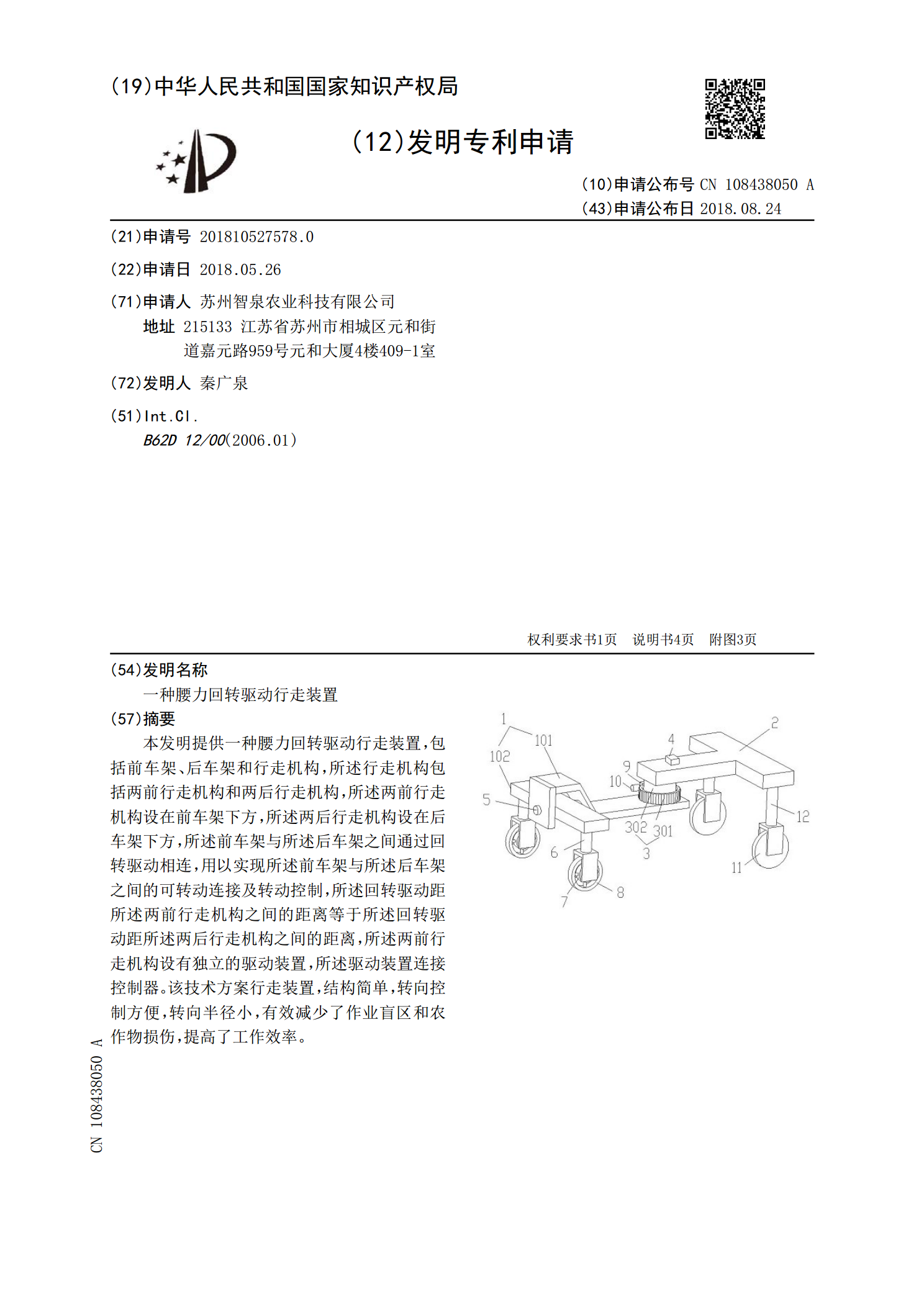
本发明提供一种腰力回转驱动行走装置,包括前车架、后车架和行走机构,所述行走机构包括两前行走机构和两后行走机构,所述两前行走机构设在前车架下方,所述两后行走机构设在后车架下方,所述前车架与所述后车架之间通过回转驱动相连,用以实现所述前车架与所述后车架之间的可转动连接及转动控制,所述回转驱动距所述两前行走机构之间的距离等于所述回转驱动距所述两后行走机构之间的距离,所述两前行走机构设有独立的驱动装置,所述驱动装置连接控制器。该技术方案行走装置,结构简单,转向控制方便,转向半径小,有效减少了作业盲区和农作物损伤,
一种回转支撑行走装置.pdf
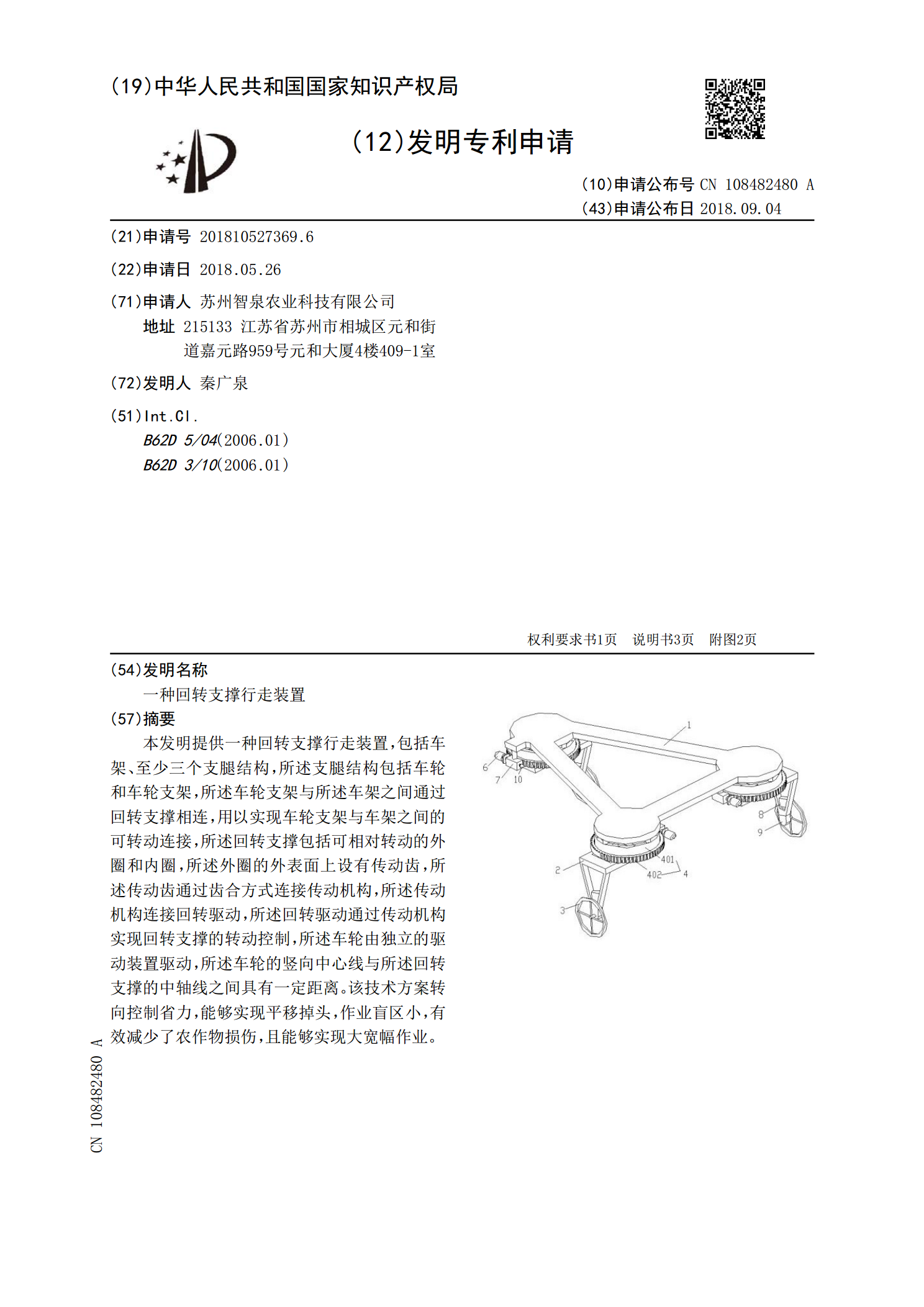
本发明提供一种回转支撑行走装置,包括车架、至少三个支腿结构,所述支腿结构包括车轮和车轮支架,所述车轮支架与所述车架之间通过回转支撑相连,用以实现车轮支架与车架之间的可转动连接,所述回转支撑包括可相对转动的外圈和内圈,所述外圈的外表面上设有传动齿,所述传动齿通过齿合方式连接传动机构,所述传动机构连接回转驱动,所述回转驱动通过传动机构实现回转支撑的转动控制,所述车轮由独立的驱动装置驱动,所述车轮的竖向中心线与所述回转支撑的中轴线之间具有一定距离。该技术方案转向控制省力,能够实现平移掉头,作业盲区小,有效减少了

一种回转驱动装置.pdf
本发明涉及一种回转驱动装置,包括固定机架,固定机架上设有托轮,托轮上端设有与托轮接触的回转驱动器,回转驱动器内设有小齿轮或小链轮,回转驱动器分为外圈和内圈,外圈与内圈通过钢球连接,内圈侧边制成齿轮或链轮,本申请实现了回转设备中回转驱动器和传动结构有机的结合,减少了成本,简化了结构,大大简化了安装调试周期,并有效提高了部件的运行可靠性。
一种回转驱动装置.pdf
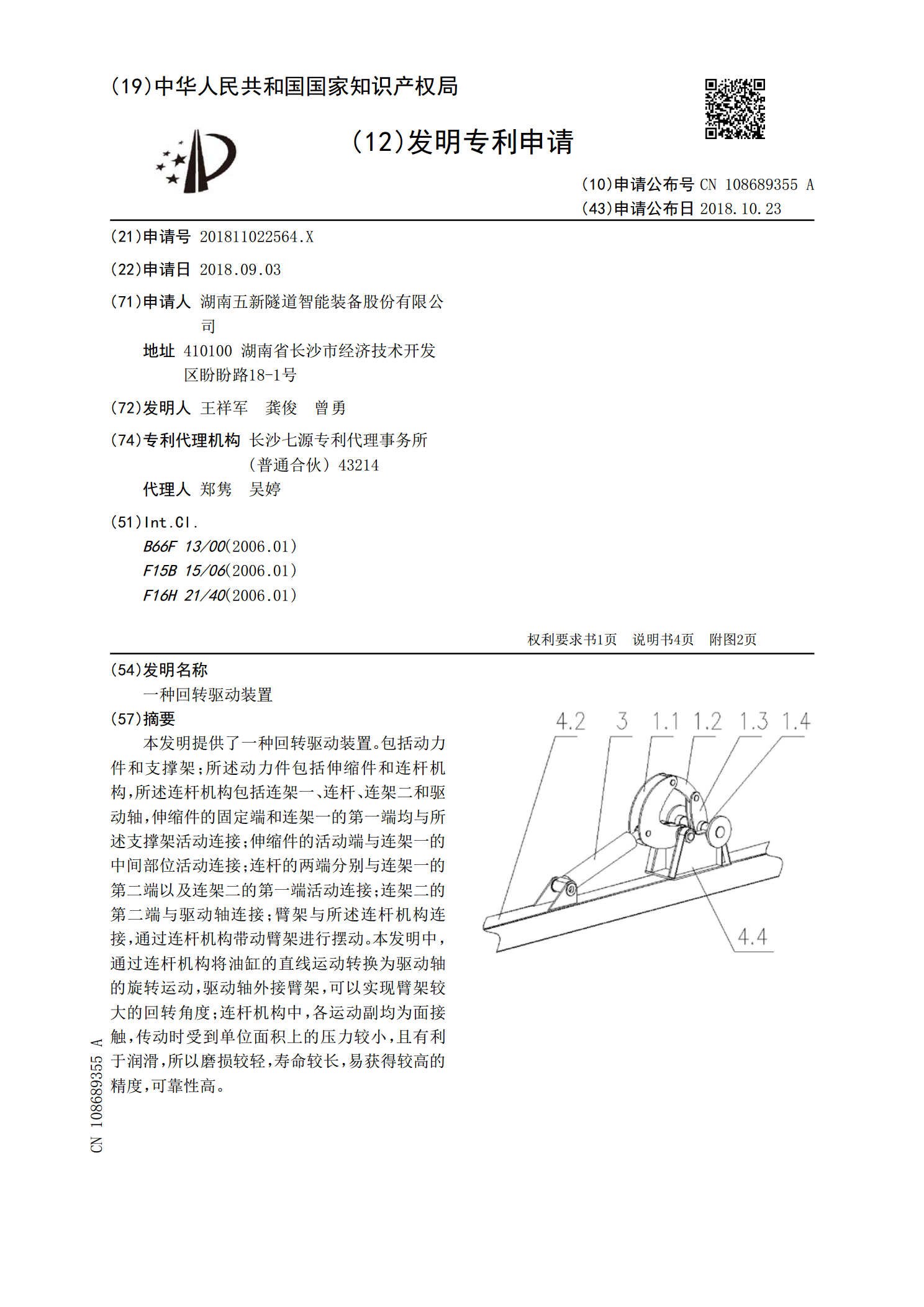
本发明提供了一种回转驱动装置。包括动力件和支撑架;所述动力件包括伸缩件和连杆机构,所述连杆机构包括连架一、连杆、连架二和驱动轴,伸缩件的固定端和连架一的第一端均与所述支撑架活动连接;伸缩件的活动端与连架一的中间部位活动连接;连杆的两端分别与连架一的第二端以及连架二的第一端活动连接;连架二的第二端与驱动轴连接;臂架与所述连杆机构连接,通过连杆机构带动臂架进行摆动。本发明中,通过连杆机构将油缸的直线运动转换为驱动轴的旋转运动,驱动轴外接臂架,可以实现臂架较大的回转角度;连杆机构中,各运动副均为面接触,传动时受

一种回转驱动装置.pdf
本发明提供了一种回转驱动装置,所述驱动装置包括基座、传动组件和回转支承组件,基座包括上基座和下基座,下基座包括空腔,上基座位于下基座上方,传动组件安装在下基座的空腔内,回转支承组件的中段与上基座连接并和传动组件接触,其特征在于,传动组件包括第一固定组件、蜗杆和第二固定组件,蜗杆通过第一固定组件和第二固定组件定位在下基座的空腔内,第一固定组件用于固定蜗杆和通过第一固定组件安装的深度控制回转驱动装置的扭矩。这种装置的优点在于:结构简单,提高了回转装置的稳定性,降低了材料成本、人工成本、机械加工成本。