
车辆后视镜调节方法及车载控制系统.pdf

雨巷****莺莺


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆后视镜调节方法及车载控制系统.pdf
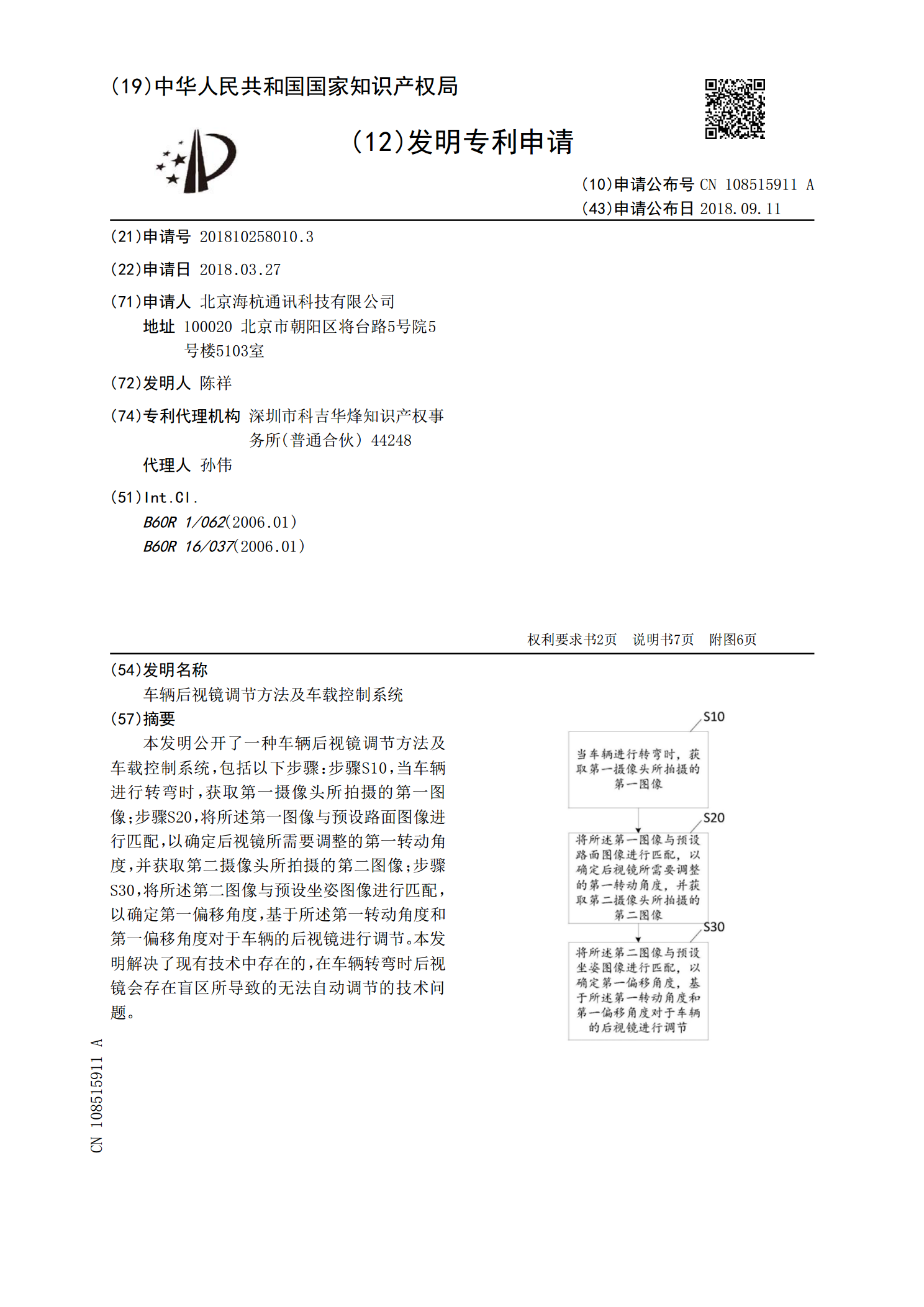
本发明公开了一种车辆后视镜调节方法及车载控制系统,包括以下步骤:步骤S10,当车辆进行转弯时,获取第一摄像头所拍摄的第一图像;步骤S20,将所述第一图像与预设路面图像进行匹配,以确定后视镜所需要调整的第一转动角度,并获取第二摄像头所拍摄的第二图像;步骤S30,将所述第二图像与预设坐姿图像进行匹配,以确定第一偏移角度,基于所述第一转动角度和第一偏移角度对于车辆的后视镜进行调节。本发明解决了现有技术中存在的,在车辆转弯时后视镜会存在盲区所导致的无法自动调节的技术问题。
车辆后视镜调节控制系统和方法.pdf
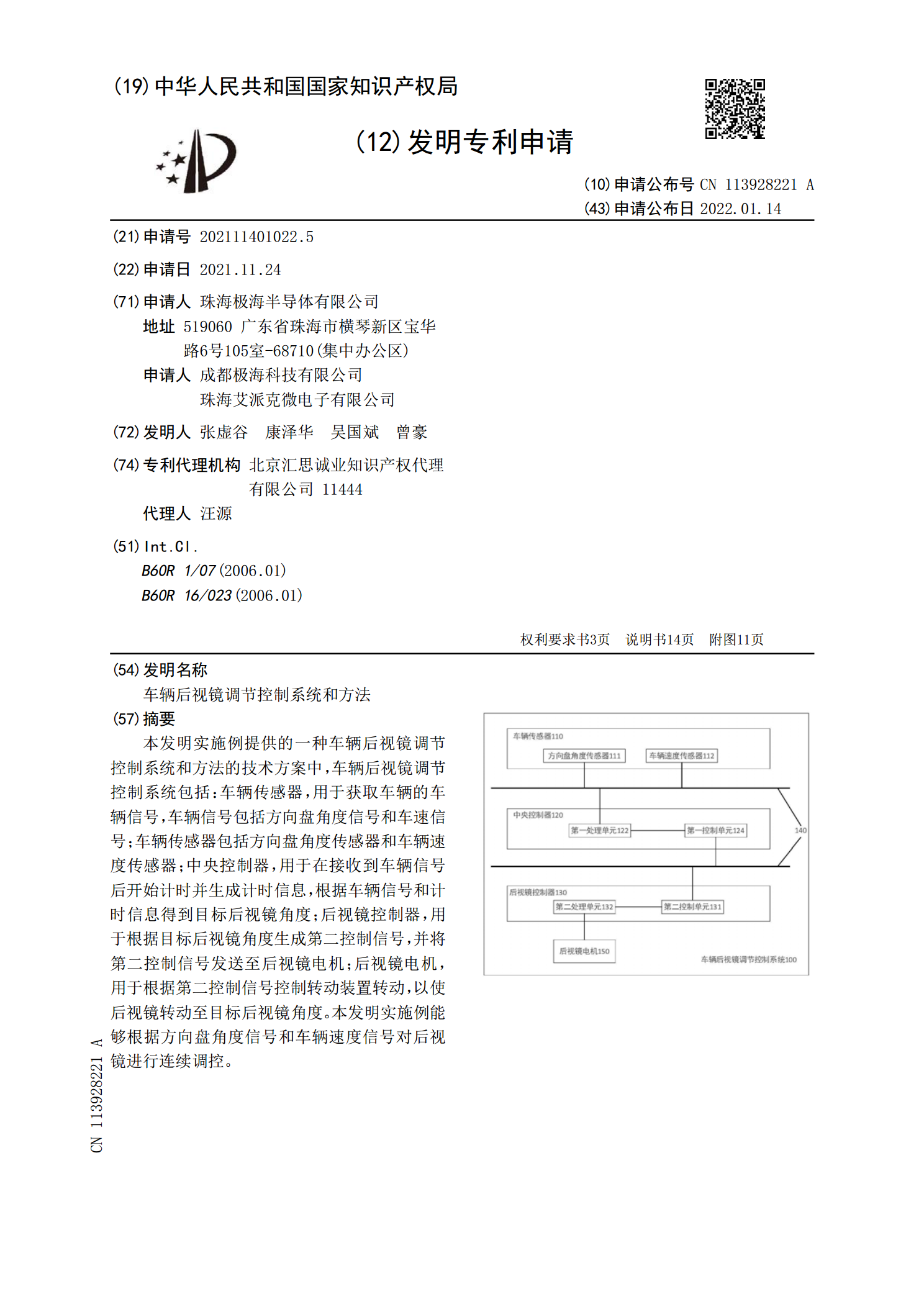
本发明实施例提供的一种车辆后视镜调节控制系统和方法的技术方案中,车辆后视镜调节控制系统包括:车辆传感器,用于获取车辆的车辆信号,车辆信号包括方向盘角度信号和车速信号;车辆传感器包括方向盘角度传感器和车辆速度传感器;中央控制器,用于在接收到车辆信号后开始计时并生成计时信息,根据车辆信号和计时信息得到目标后视镜角度;后视镜控制器,用于根据目标后视镜角度生成第二控制信号,并将第二控制信号发送至后视镜电机;后视镜电机,用于根据第二控制信号控制转动装置转动,以使后视镜转动至目标后视镜角度。本发明实施例能够根据方向盘
车载电子后视镜显示切换方法、车载电子后视镜及车辆.pdf
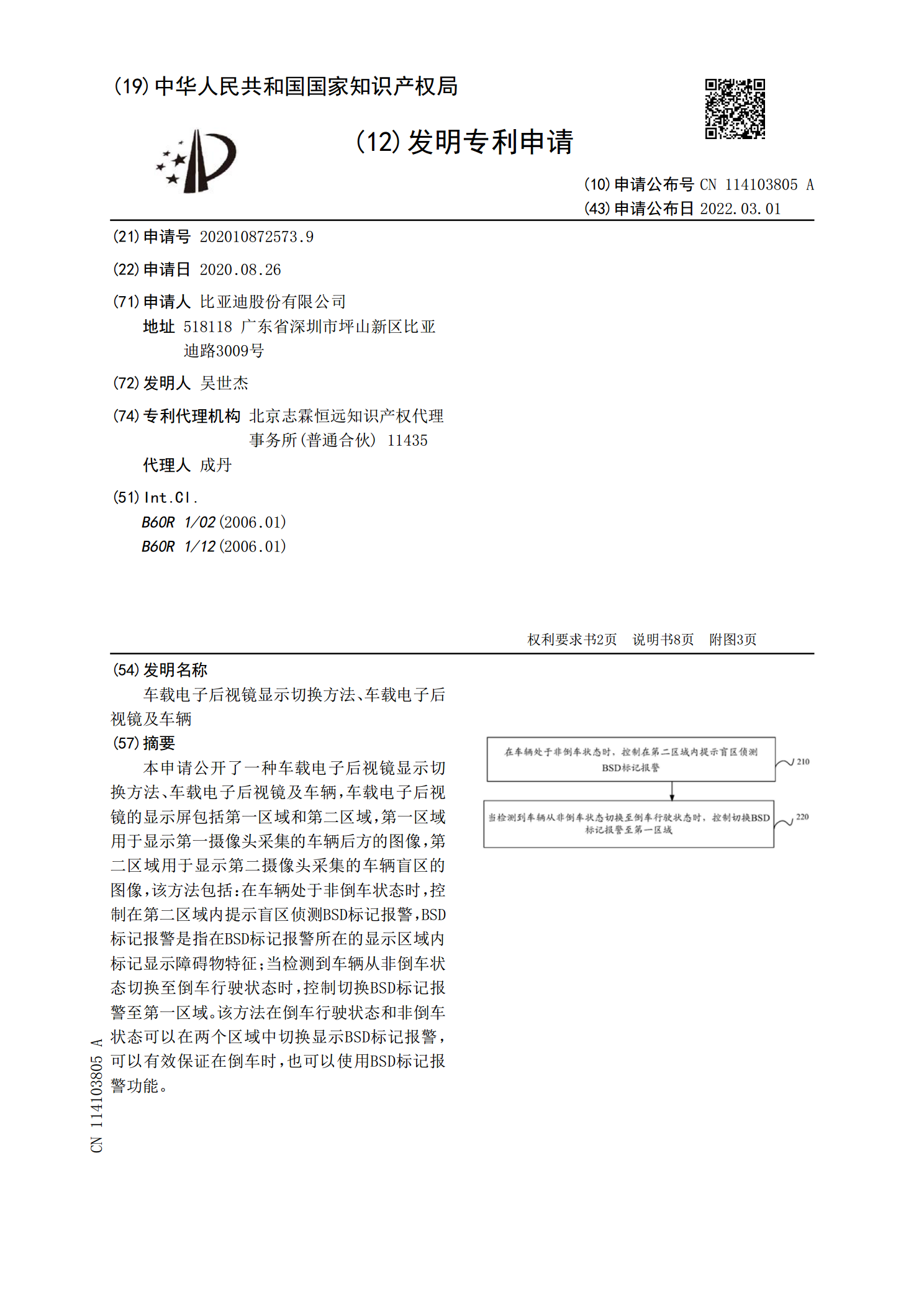
本申请公开了一种车载电子后视镜显示切换方法、车载电子后视镜及车辆,车载电子后视镜的显示屏包括第一区域和第二区域,第一区域用于显示第一摄像头采集的车辆后方的图像,第二区域用于显示第二摄像头采集的车辆盲区的图像,该方法包括:在车辆处于非倒车状态时,控制在第二区域内提示盲区侦测BSD标记报警,BSD标记报警是指在BSD标记报警所在的显示区域内标记显示障碍物特征;当检测到车辆从非倒车状态切换至倒车行驶状态时,控制切换BSD标记报警至第一区域。该方法在倒车行驶状态和非倒车状态可以在两个区域中切换显示BSD标记报警,

车辆的后视镜角度调节系统及调节方法.pdf
本发明的车辆的后视镜角度调节系统包括驾驶员意图判断系统、双侧单目摄像头系统、后视镜角度控制ECU及后视镜角度调节器。驾驶员意图判断系统判断车辆是否即将驶入或驶出交通主干道。双侧单目摄像头系统捕捉自车斜后方的其他车辆的图像,并根据图像计算其他车辆相对于自车车身的角度。后视镜角度控制ECU在驾驶员意图判断系统判断为车辆即将驶入或驶出交通主干道的情况下,以从双侧单目摄像头系统获取的其他车辆相对于自车车身的角度,控制后视镜角度调节器。后视镜角度调节器调节左侧和/或右侧的外后视镜的角度。
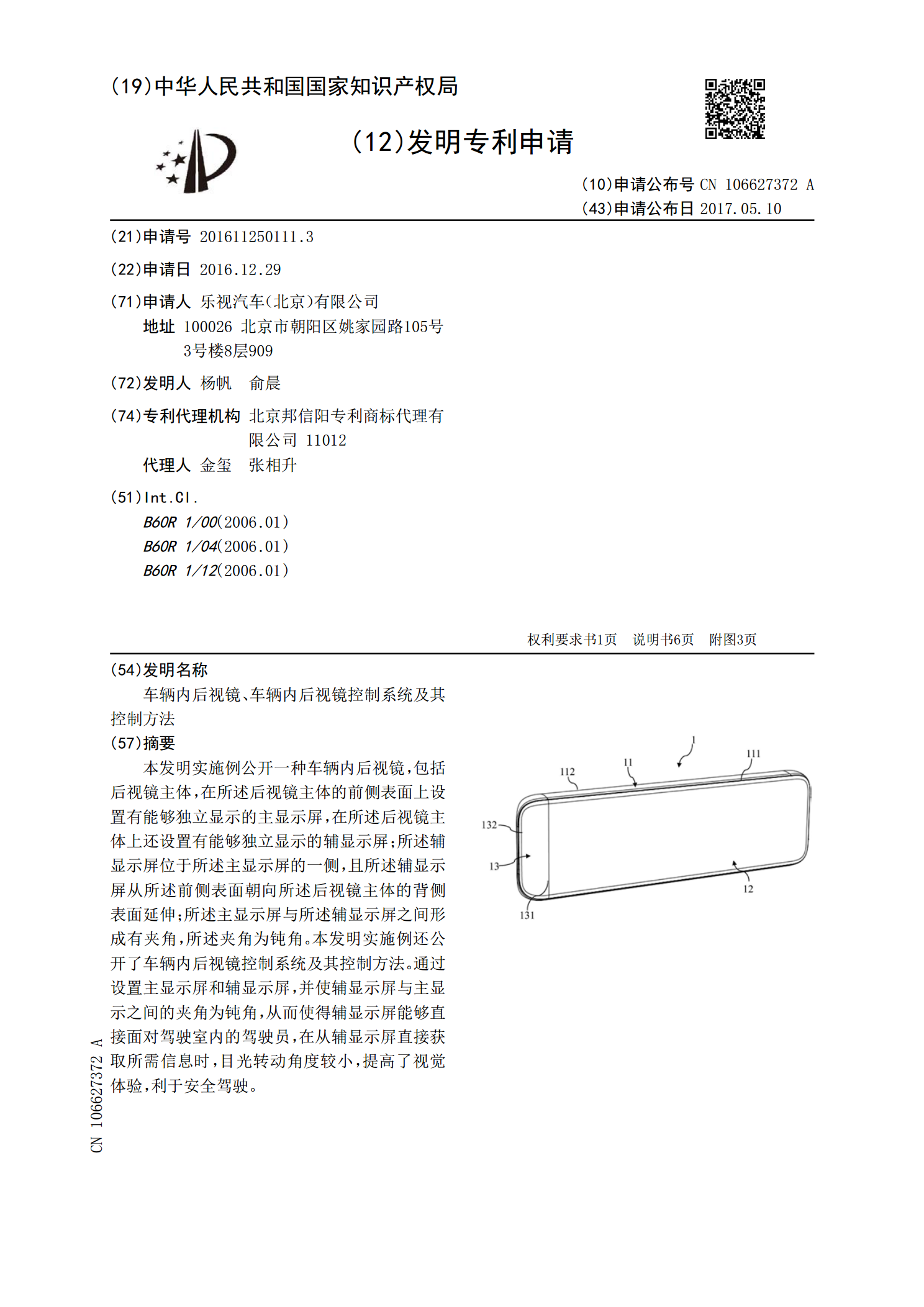
车辆内后视镜、车辆内后视镜控制系统及其控制方法.pdf
本发明实施例公开一种车辆内后视镜,包括后视镜主体,在所述后视镜主体的前侧表面上设置有能够独立显示的主显示屏,在所述后视镜主体上还设置有能够独立显示的辅显示屏;所述辅显示屏位于所述主显示屏的一侧,且所述辅显示屏从所述前侧表面朝向所述后视镜主体的背侧表面延伸;所述主显示屏与所述辅显示屏之间形成有夹角,所述夹角为钝角。本发明实施例还公开了车辆内后视镜控制系统及其控制方法。通过设置主显示屏和辅显示屏,并使辅显示屏与主显示之间的夹角为钝角,从而使得辅显示屏能够直接面对驾驶室内的驾驶员,在从辅显示屏直接获取所需信息时