
一种检测车辆A柱盲区的方法及其装置.pdf

小忆****ng


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种检测车辆A柱盲区的方法及其装置.pdf
本发明涉及汽车安全驾驶方法技术领域,尤其涉及一种检测车辆A柱盲区的方法,包括以下步骤:实时采集左右前方A柱盲区中障碍物的影像,并传输至车载ECU控制器和车内的车载显示装置;实时检测左右前方A柱盲区中障碍物与本车辆之间的相对距离,并传输至车载ECU控制器,当所述相对距离小于设定警报距离时,发出警报信息;车载ECU控制器根据采集到的影像和检测到的相对距离,输出相应的提示信号。本发明的发明目的在于提供一种检测车辆A柱盲区的方法,采用本发明提供的技术方案解决了现有车辆针对A柱盲区的障碍物无法进行有效的识别、探测、
一种A柱盲区监测装置、车辆及方法.pdf
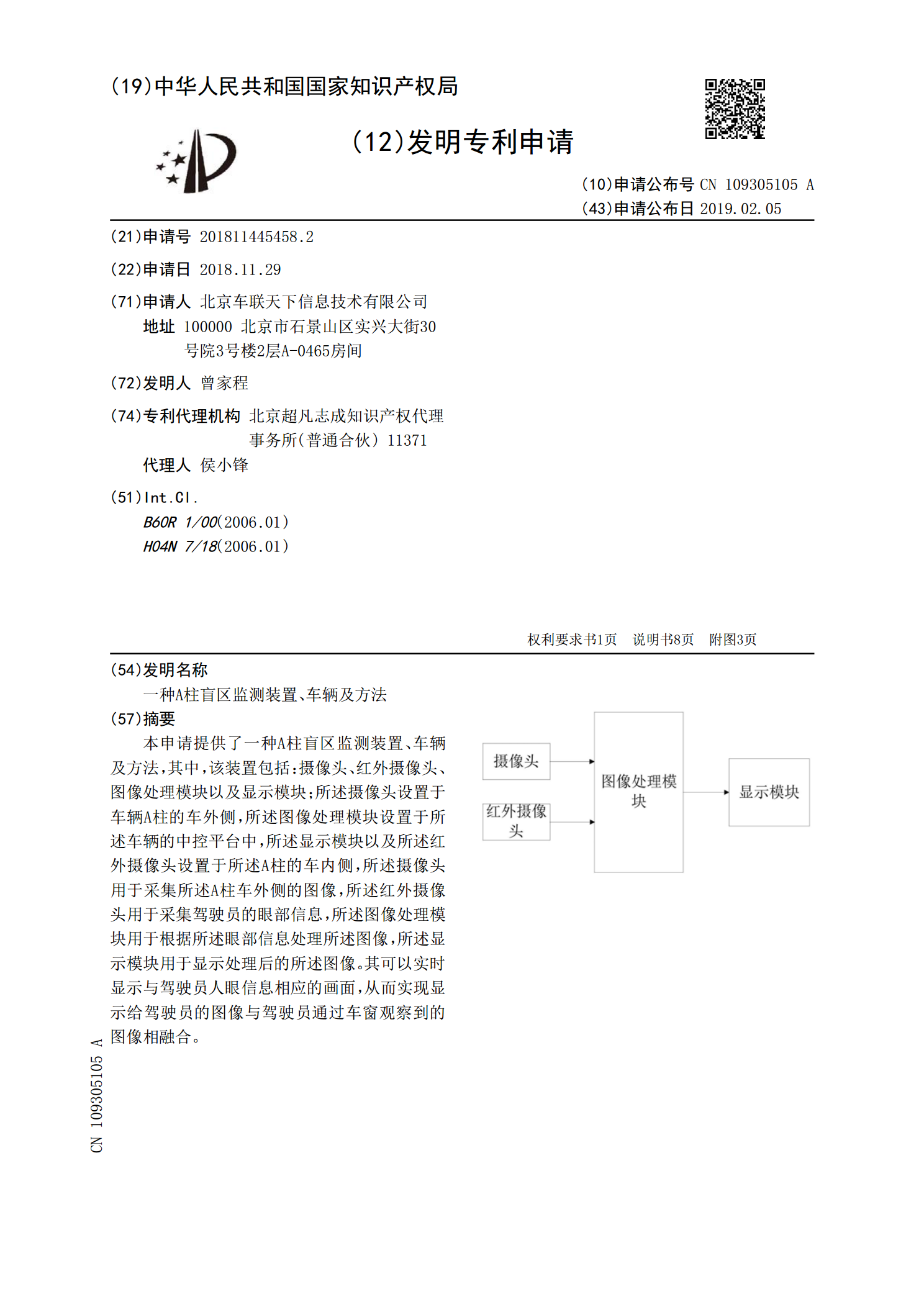
本申请提供了一种A柱盲区监测装置、车辆及方法,其中,该装置包括:摄像头、红外摄像头、图像处理模块以及显示模块;所述摄像头设置于车辆A柱的车外侧,所述图像处理模块设置于所述车辆的中控平台中,所述显示模块以及所述红外摄像头设置于所述A柱的车内侧,所述摄像头用于采集所述A柱车外侧的图像,所述红外摄像头用于采集驾驶员的眼部信息,所述图像处理模块用于根据所述眼部信息处理所述图像,所述显示模块用于显示处理后的所述图像。其可以实时显示与驾驶员人眼信息相应的画面,从而实现显示给驾驶员的图像与驾驶员通过车窗观察到的图像相融
一种消除车辆A柱盲区的装置和方法.pdf
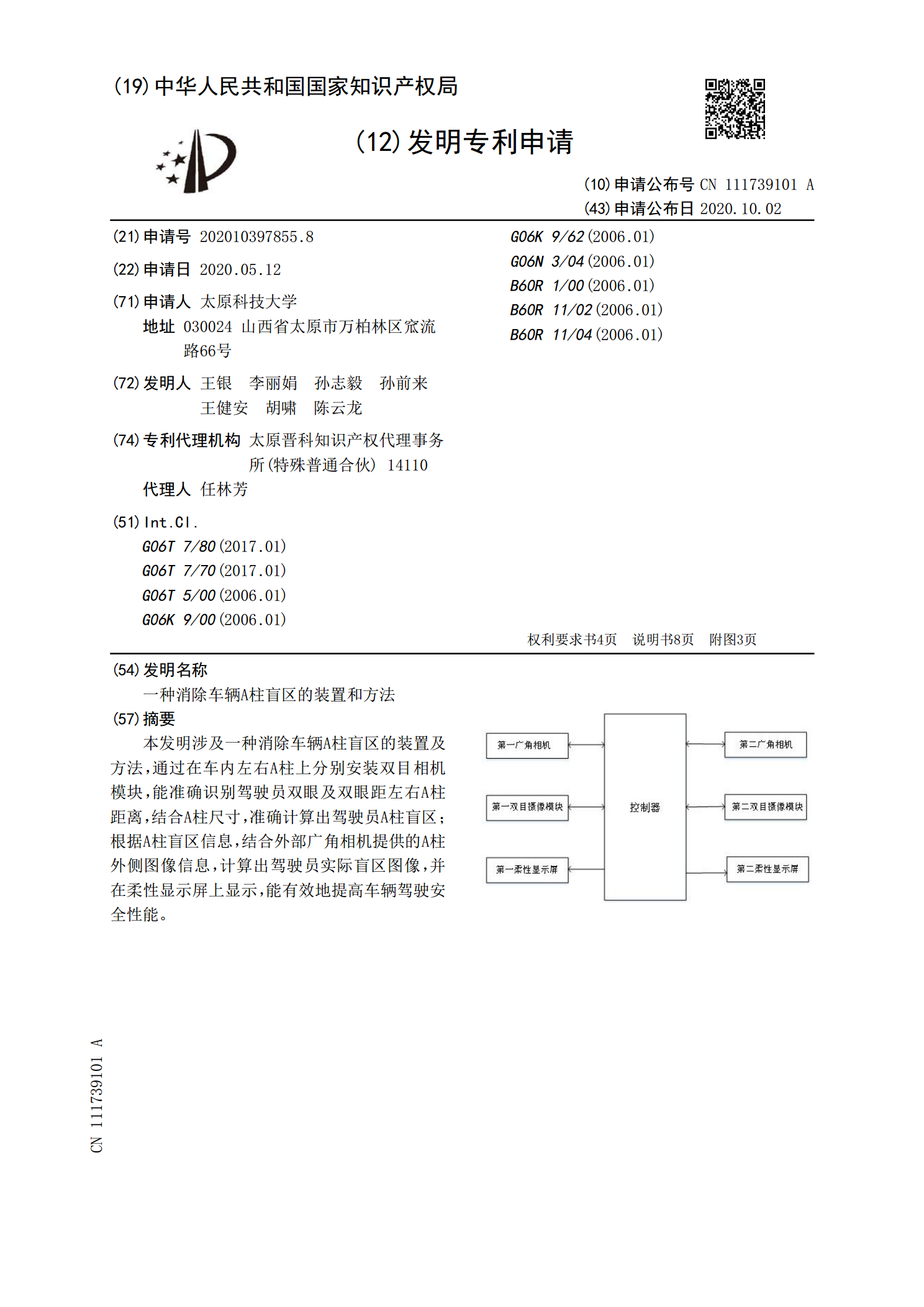
本发明涉及一种消除车辆A柱盲区的装置及方法,通过在车内左右A柱上分别安装双目相机模块,能准确识别驾驶员双眼及双眼距左右A柱距离,结合A柱尺寸,准确计算出驾驶员A柱盲区;根据A柱盲区信息,结合外部广角相机提供的A柱外侧图像信息,计算出驾驶员实际盲区图像,并在柔性显示屏上显示,能有效地提高车辆驾驶安全性能。

一种车辆盲区检测装置、方法及车辆.pdf
本发明公开了一种车辆盲区检测装置、方法及车辆,所述装置包括道路检测模块、摄像头、调节模块、控制模块、显示模块和提醒模块;道路检测模块,用于实时检测道路信息,道路信息包括道路坡度信息和道路弯度信息;摄像头,用于获取车辆前方路面信息;调节模块用于调节摄像头的角度;显示模块,用于显示摄像头获得的车辆前方路面信息;提醒模块,用于在检测到车辆前方出现物体时提醒驾驶员;控制模块,用于当道路坡度超过预设坡度值和/或道路弯度超过预设弯度时,控制摄像头和调节模块工作,以及当检测到车辆前方出现物体时,控制提醒模块工作,本发明
一种消除车辆A柱盲区的装置及包括该装置的车辆.pdf
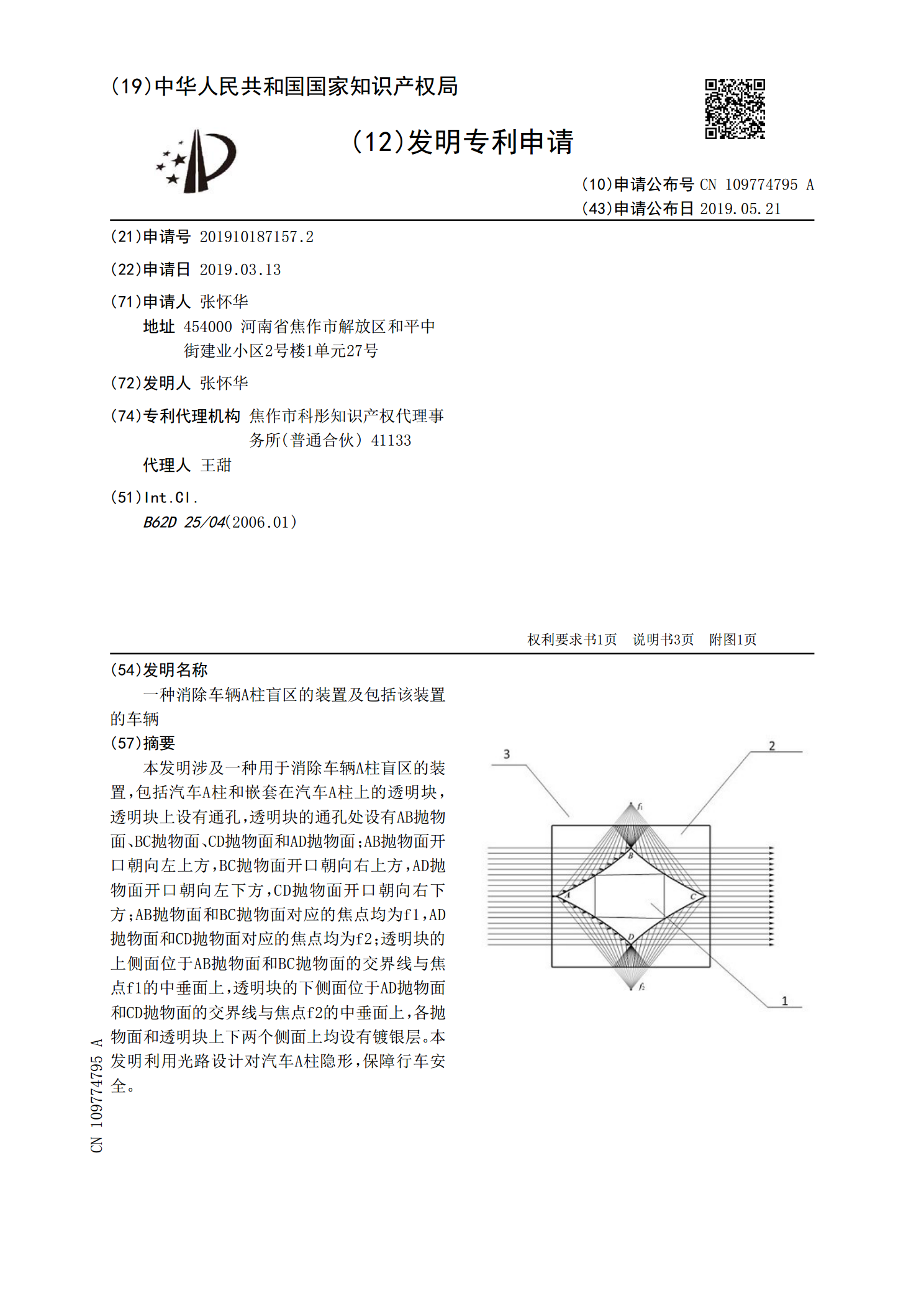
本发明涉及一种用于消除车辆A柱盲区的装置,包括汽车A柱和嵌套在汽车A柱上的透明块,透明块上设有通孔,透明块的通孔处设有AB抛物面、BC抛物面、CD抛物面和AD抛物面;AB抛物面开口朝向左上方,BC抛物面开口朝向右上方,AD抛物面开口朝向左下方,CD抛物面开口朝向右下方;AB抛物面和BC抛物面对应的焦点均为f1,AD抛物面和CD抛物面对应的焦点均为f2;透明块的上侧面位于AB抛物面和BC抛物面的交界线与焦点f1的中垂面上,透明块的下侧面位于AD抛物面和CD抛物面的交界线与焦点f2的中垂面上,各抛物面和透明块