
一种消除车辆A柱盲区的装置和方法.pdf

灵慧****89

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种消除车辆A柱盲区的装置和方法.pdf
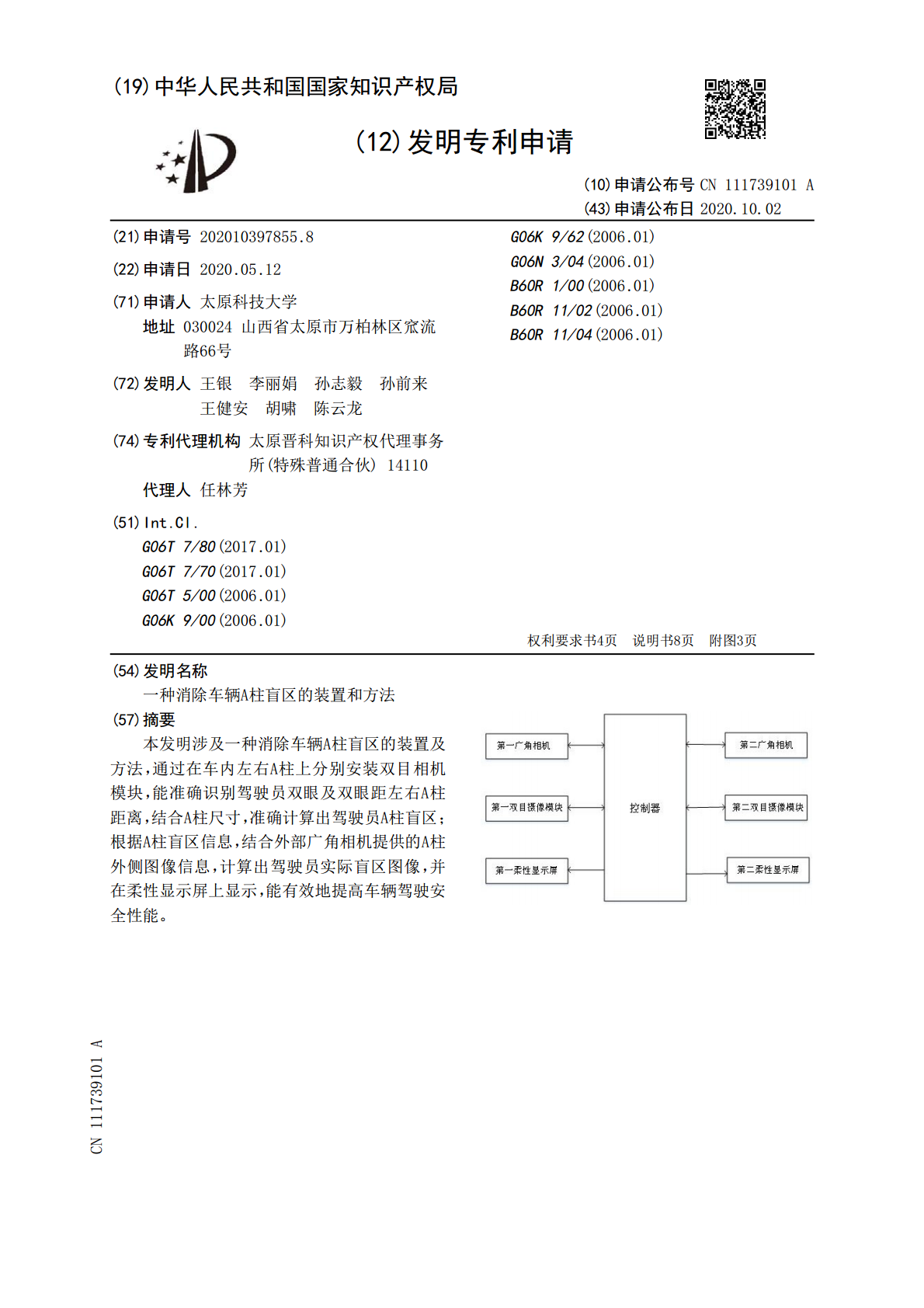
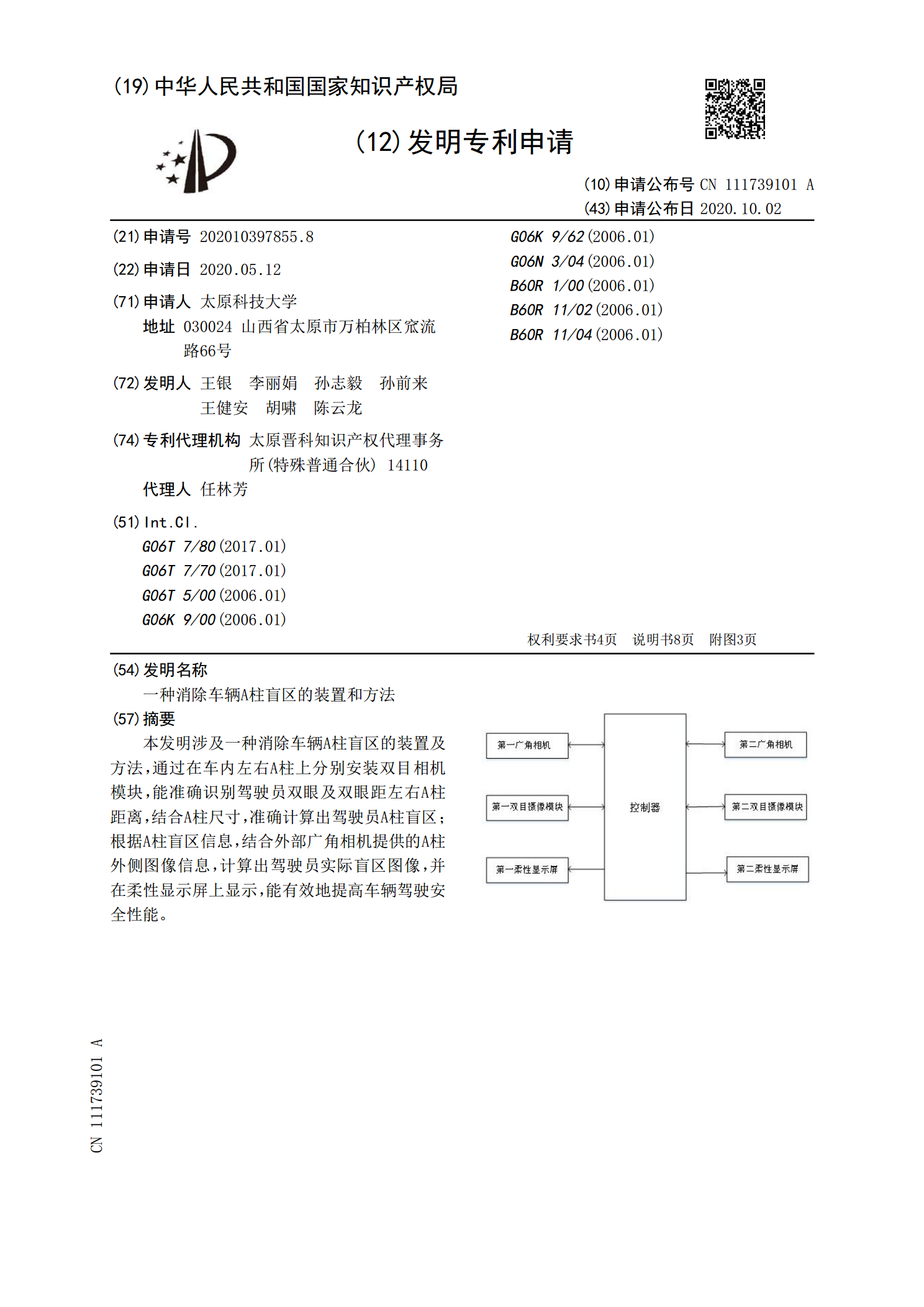
本发明涉及一种消除车辆A柱盲区的装置及方法,通过在车内左右A柱上分别安装双目相机模块,能准确识别驾驶员双眼及双眼距左右A柱距离,结合A柱尺寸,准确计算出驾驶员A柱盲区;根据A柱盲区信息,结合外部广角相机提供的A柱外侧图像信息,计算出驾驶员实际盲区图像,并在柔性显示屏上显示,能有效地提高车辆驾驶安全性能。
消除A柱盲区装置和消除A柱盲区装置的控制方法.pdf
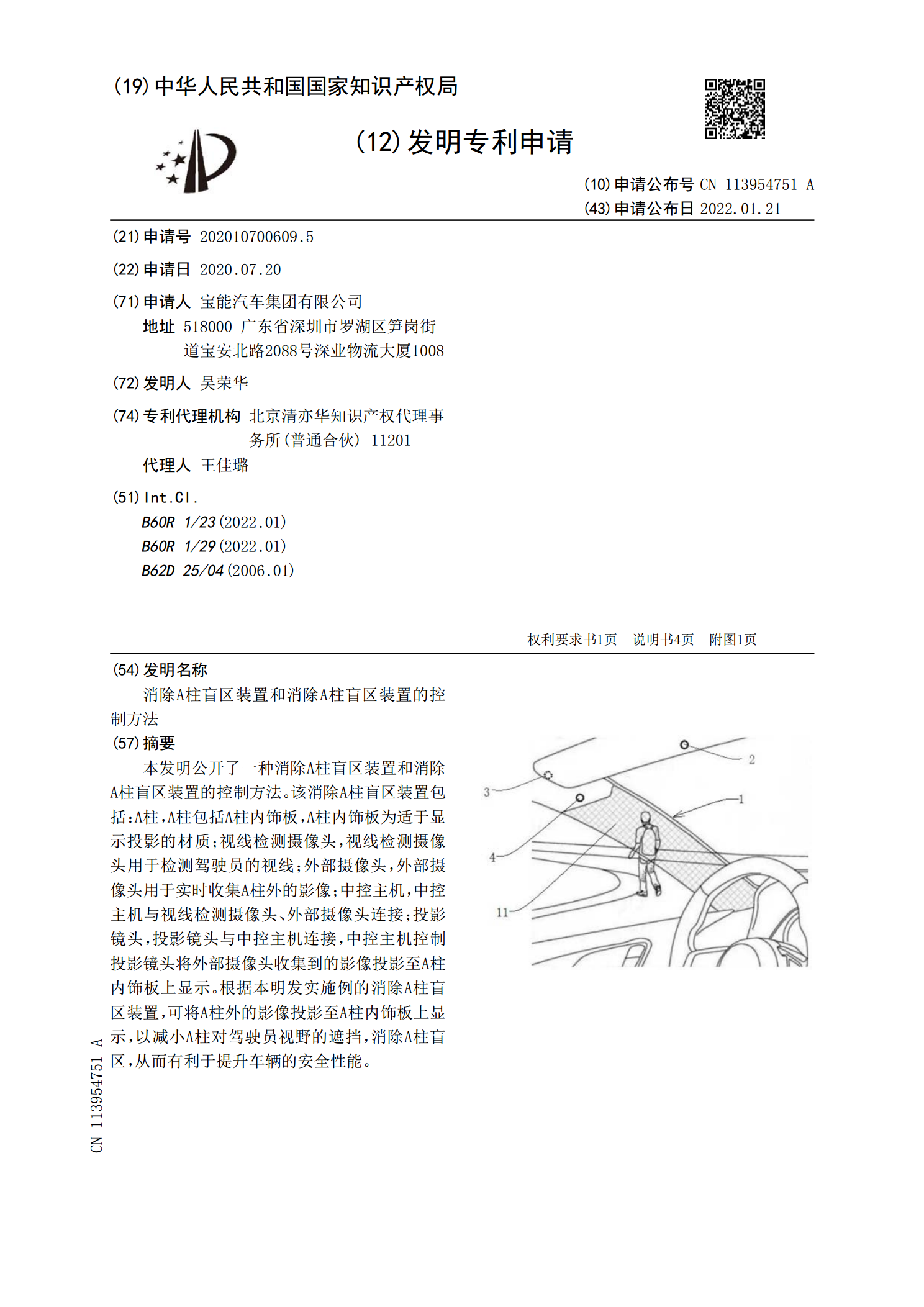
本发明公开了一种消除A柱盲区装置和消除A柱盲区装置的控制方法。该消除A柱盲区装置包括:A柱,A柱包括A柱内饰板,A柱内饰板为适于显示投影的材质;视线检测摄像头,视线检测摄像头用于检测驾驶员的视线;外部摄像头,外部摄像头用于实时收集A柱外的影像;中控主机,中控主机与视线检测摄像头、外部摄像头连接;投影镜头,投影镜头与中控主机连接,中控主机控制投影镜头将外部摄像头收集到的影像投影至A柱内饰板上显示。根据本明发实施例的消除A柱盲区装置,可将A柱外的影像投影至A柱内饰板上显示,以减小A柱对驾驶员视野的遮挡,消除A
一种消除车辆A柱盲区的装置及包括该装置的车辆.pdf
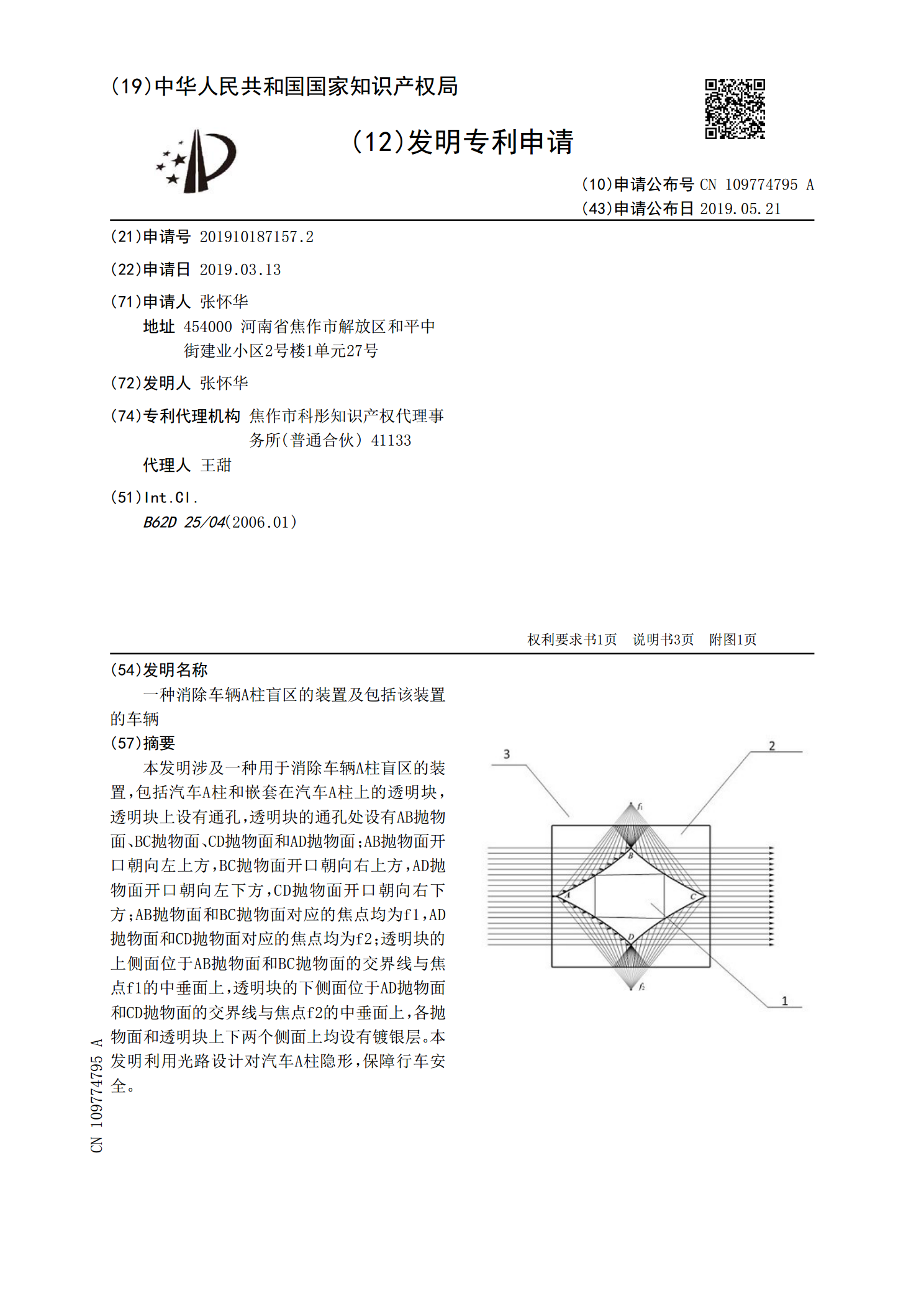
本发明涉及一种用于消除车辆A柱盲区的装置,包括汽车A柱和嵌套在汽车A柱上的透明块,透明块上设有通孔,透明块的通孔处设有AB抛物面、BC抛物面、CD抛物面和AD抛物面;AB抛物面开口朝向左上方,BC抛物面开口朝向右上方,AD抛物面开口朝向左下方,CD抛物面开口朝向右下方;AB抛物面和BC抛物面对应的焦点均为f1,AD抛物面和CD抛物面对应的焦点均为f2;透明块的上侧面位于AB抛物面和BC抛物面的交界线与焦点f1的中垂面上,透明块的下侧面位于AD抛物面和CD抛物面的交界线与焦点f2的中垂面上,各抛物面和透明块
一种汽车及用于消除汽车A柱盲区的消除装置和消除方法.pdf
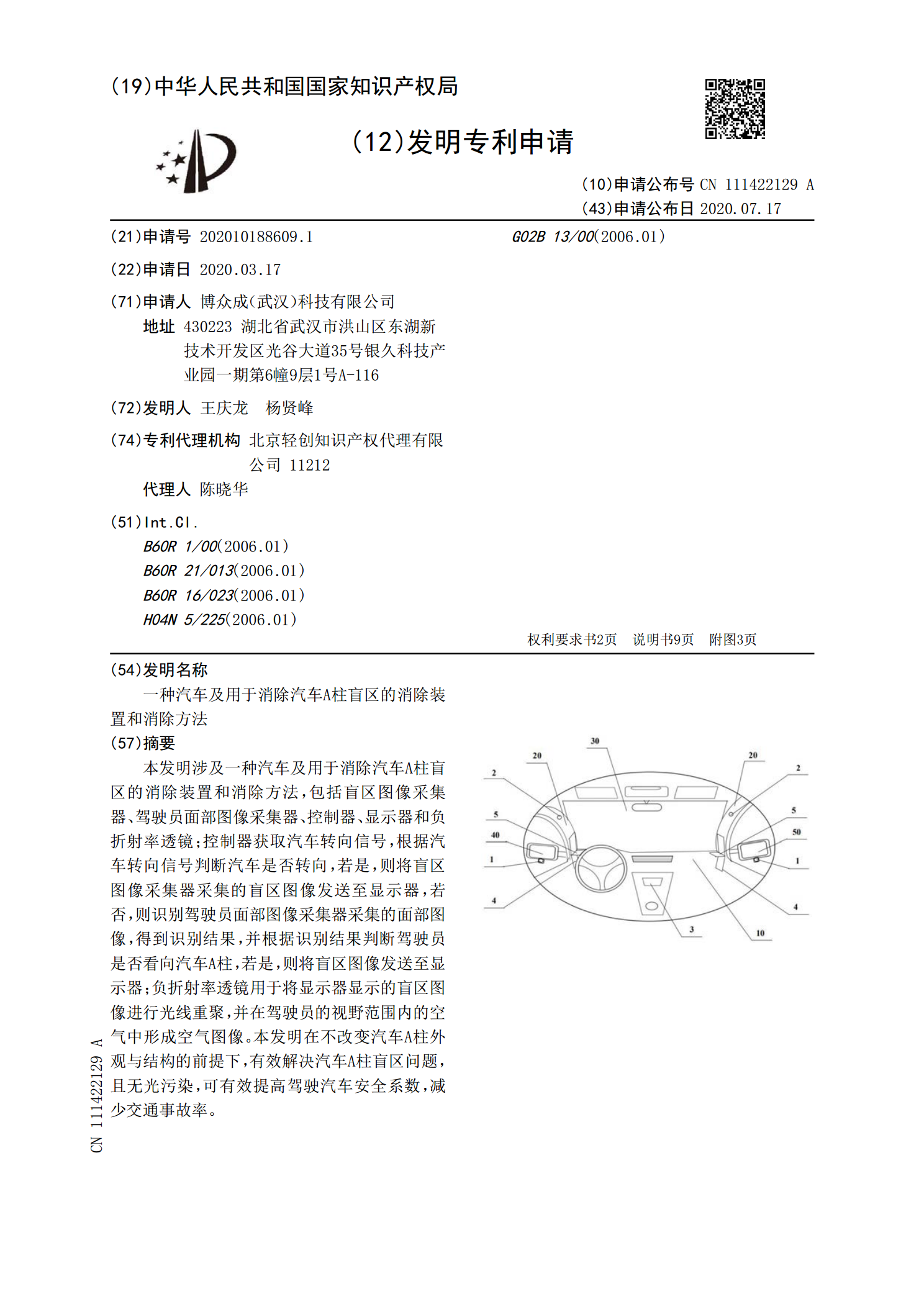
本发明涉及一种汽车及用于消除汽车A柱盲区的消除装置和消除方法,包括盲区图像采集器、驾驶员面部图像采集器、控制器、显示器和负折射率透镜;控制器获取汽车转向信号,根据汽车转向信号判断汽车是否转向,若是,则将盲区图像采集器采集的盲区图像发送至显示器,若否,则识别驾驶员面部图像采集器采集的面部图像,得到识别结果,并根据识别结果判断驾驶员是否看向汽车A柱,若是,则将盲区图像发送至显示器;负折射率透镜用于将显示器显示的盲区图像进行光线重聚,并在驾驶员的视野范围内的空气中形成空气图像。本发明在不改变汽车A柱外观与结构的
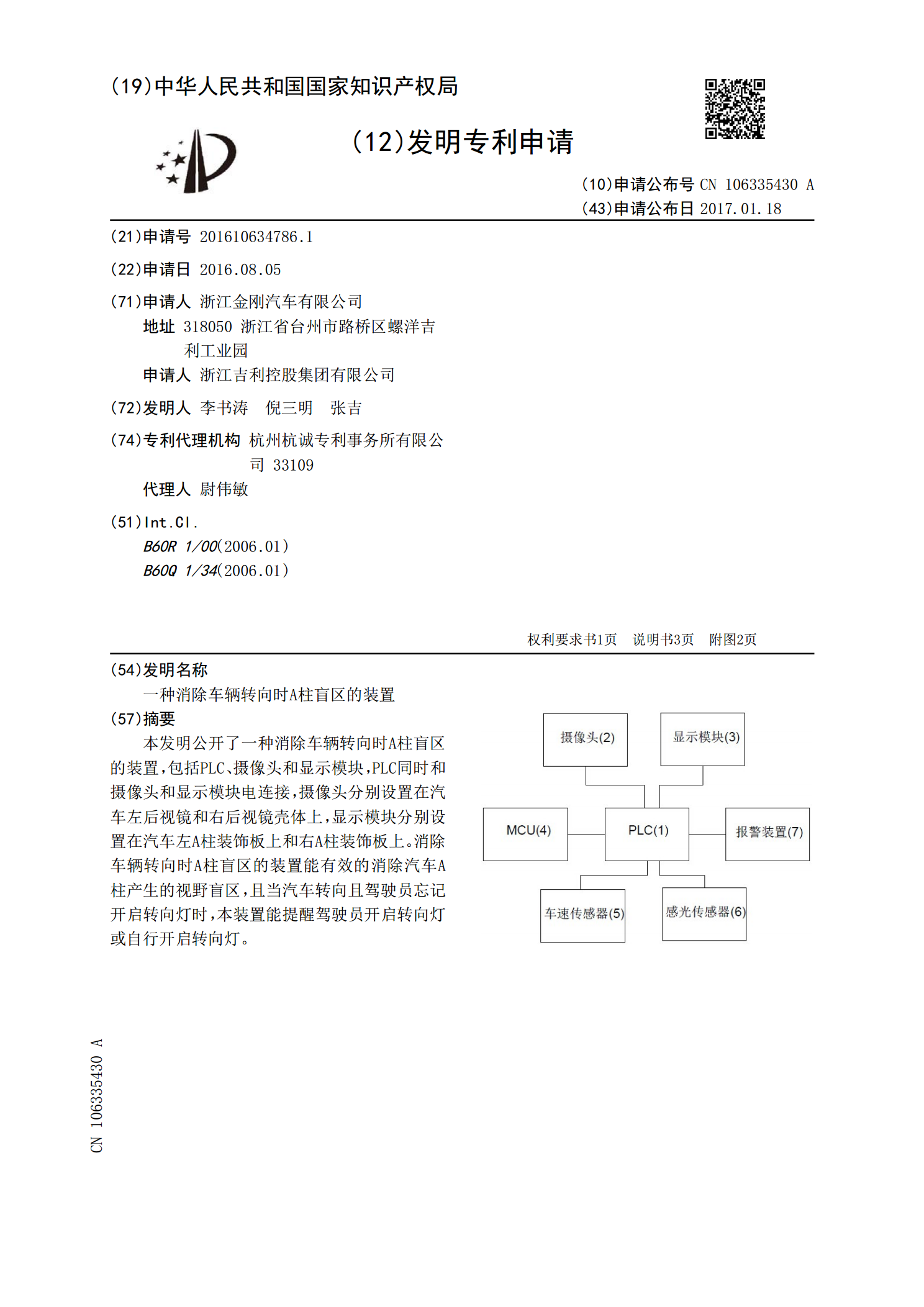
一种消除车辆转向时A柱盲区的装置.pdf
本发明公开了一种消除车辆转向时A柱盲区的装置,包括PLC、摄像头和显示模块,PLC同时和摄像头和显示模块电连接,摄像头分别设置在汽车左后视镜和右后视镜壳体上,显示模块分别设置在汽车左A柱装饰板上和右A柱装饰板上。消除车辆转向时A柱盲区的装置能有效的消除汽车A柱产生的视野盲区,且当汽车转向且驾驶员忘记开启转向灯时,本装置能提醒驾驶员开启转向灯或自行开启转向灯。