
驾驶辅助系统和方法.pdf

冷霜****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
驾驶辅助方法和系统.pdf
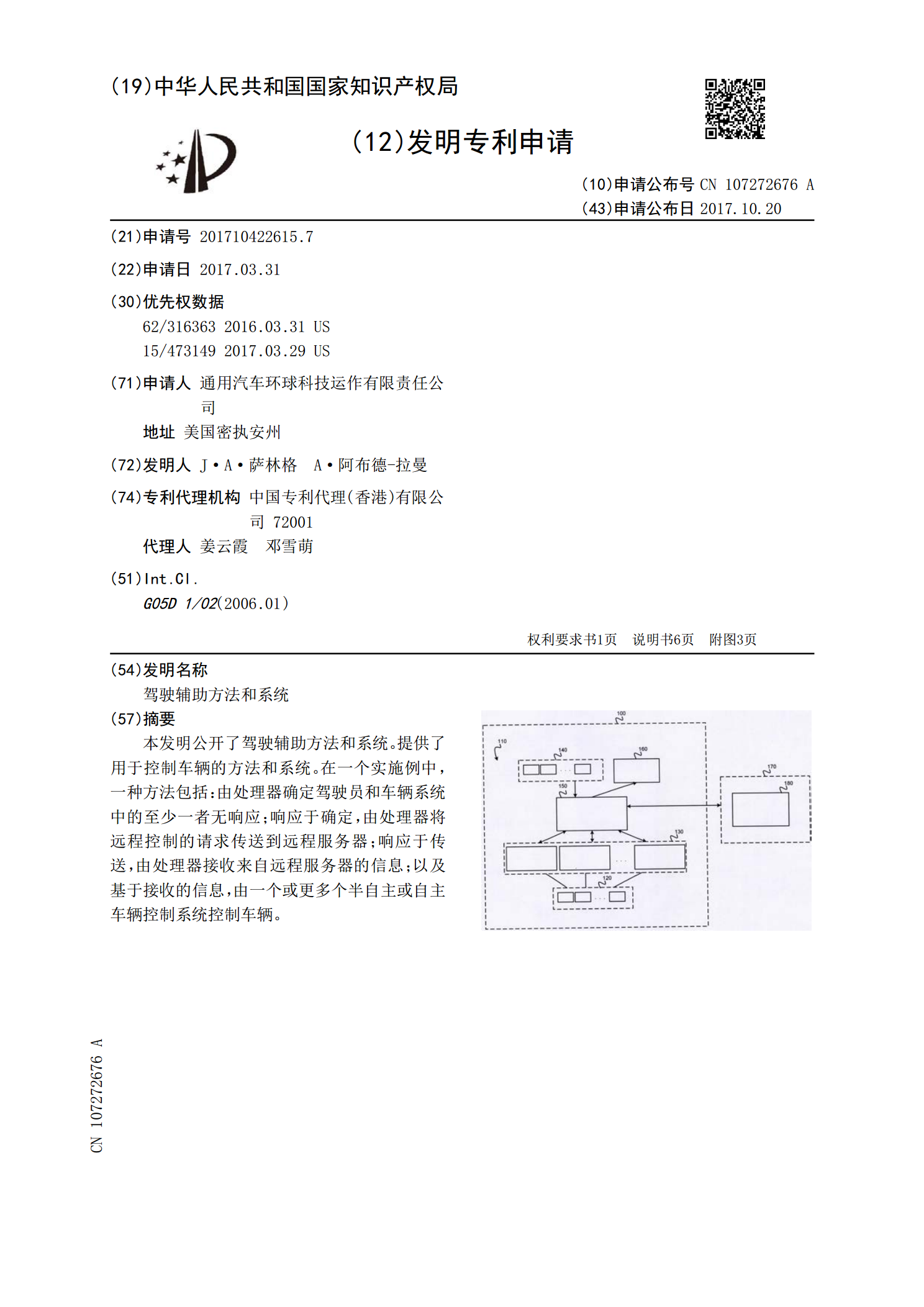
本发明公开了驾驶辅助方法和系统。提供了用于控制车辆的方法和系统。在一个实施例中,一种方法包括:由处理器确定驾驶员和车辆系统中的至少一者无响应;响应于确定,由处理器将远程控制的请求传送到远程服务器;响应于传送,由处理器接收来自远程服务器的信息;以及基于接收的信息,由一个或更多个半自主或自主车辆控制系统控制车辆。

驾驶辅助系统和方法.pdf
本发明涉及驾驶辅助系统,驾驶辅助系统包括:图像获取装置,图像获取装置获取沿途的交通标识的图像;处理装置,处理装置查找以驾驶员选定的语言对图像获取装置获取的交通标识的含义进行解释的语音信息或视频信息;播放装置,播放装置在车内播放处理装置查找到的语音信息或视频信息。本发明还涉及驾驶辅助方法。本发明中,通过以驾驶员选定的语言对沿途的交通标识的含义进行解释,从而使得驾驶员能够迅速获知交通标识的含义,以利于安全和规范驾驶。
驾驶辅助系统和方法.pdf
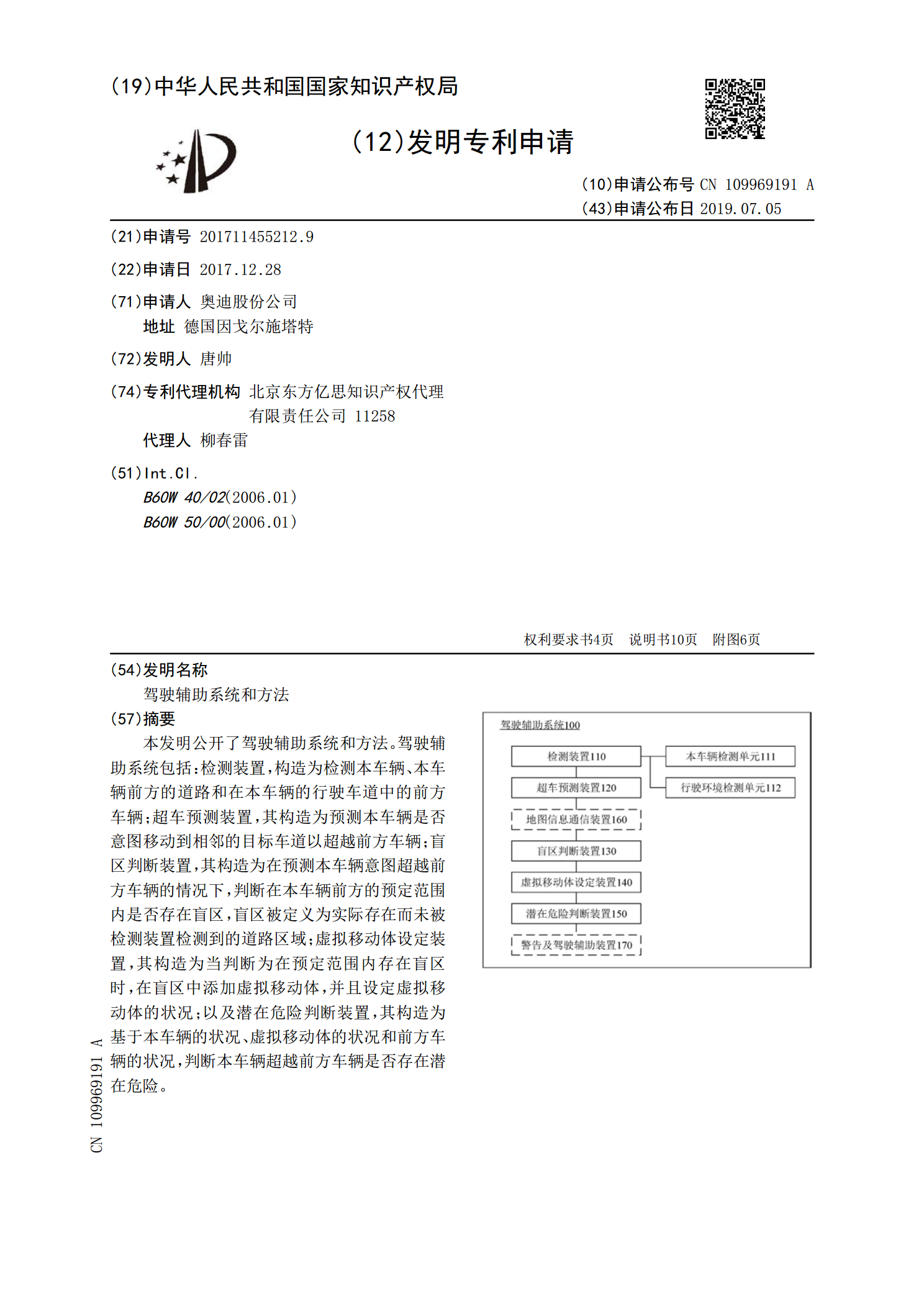
本发明公开了驾驶辅助系统和方法。驾驶辅助系统包括:检测装置,构造为检测本车辆、本车辆前方的道路和在本车辆的行驶车道中的前方车辆;超车预测装置,其构造为预测本车辆是否意图移动到相邻的目标车道以超越前方车辆;盲区判断装置,其构造为在预测本车辆意图超越前方车辆的情况下,判断在本车辆前方的预定范围内是否存在盲区,盲区被定义为实际存在而未被检测装置检测到的道路区域;虚拟移动体设定装置,其构造为当判断为在预定范围内存在盲区时,在盲区中添加虚拟移动体,并且设定虚拟移动体的状况;以及潜在危险判断装置,其构造为基于本车辆的
驾驶辅助系统和方法.pdf
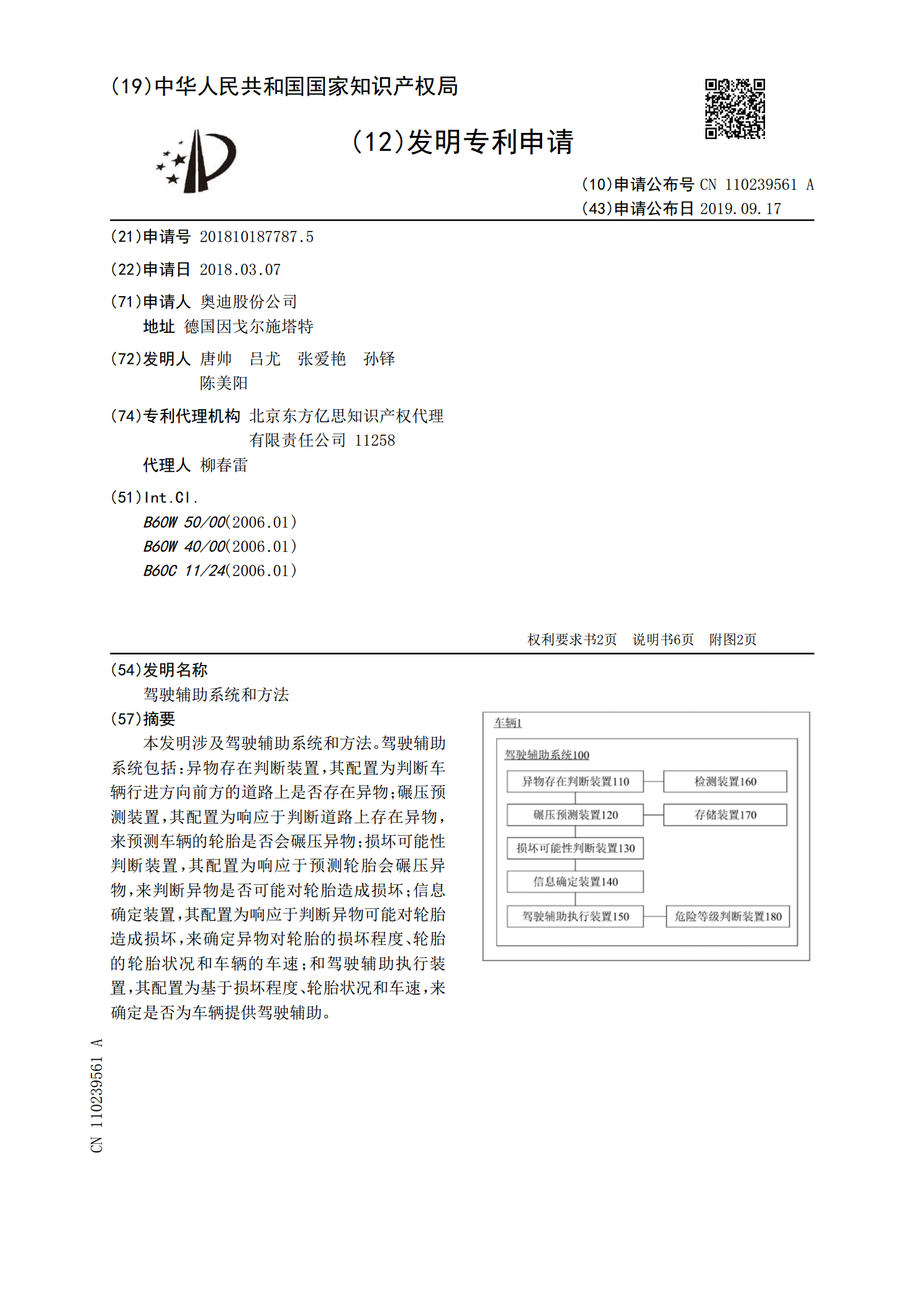
本发明涉及驾驶辅助系统和方法。驾驶辅助系统包括:异物存在判断装置,其配置为判断车辆行进方向前方的道路上是否存在异物;碾压预测装置,其配置为响应于判断道路上存在异物,来预测车辆的轮胎是否会碾压异物;损坏可能性判断装置,其配置为响应于预测轮胎会碾压异物,来判断异物是否可能对轮胎造成损坏;信息确定装置,其配置为响应于判断异物可能对轮胎造成损坏,来确定异物对轮胎的损坏程度、轮胎的轮胎状况和车辆的车速;和驾驶辅助执行装置,其配置为基于损坏程度、轮胎状况和车速,来确定是否为车辆提供驾驶辅助。
驾驶辅助装置、车辆控制装置、驾驶辅助系统和驾驶辅助方法.pdf
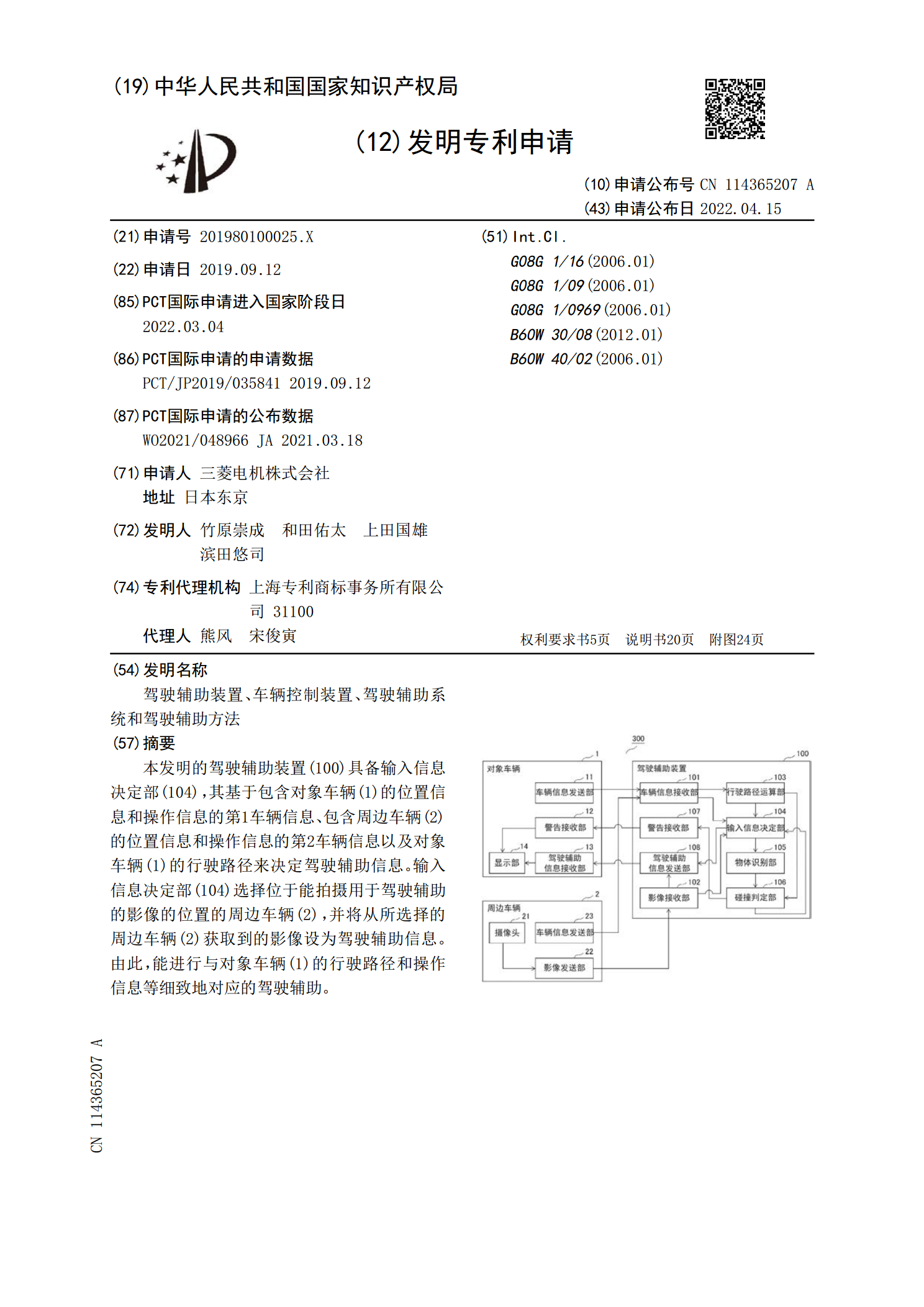
本发明的驾驶辅助装置(100)具备输入信息决定部(104),其基于包含对象车辆(1)的位置信息和操作信息的第1车辆信息、包含周边车辆(2)的位置信息和操作信息的第2车辆信息以及对象车辆(1)的行驶路径来决定驾驶辅助信息。输入信息决定部(104)选择位于能拍摄用于驾驶辅助的影像的位置的周边车辆(2),并将从所选择的周边车辆(2)获取到的影像设为驾驶辅助信息。由此,能进行与对象车辆(1)的行驶路径和操作信息等细致地对应的驾驶辅助。