
汽车盲区预警系统、汽车、方法及其装置.pdf

曾琪****是我

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
汽车盲区预警系统、汽车、方法及其装置.pdf
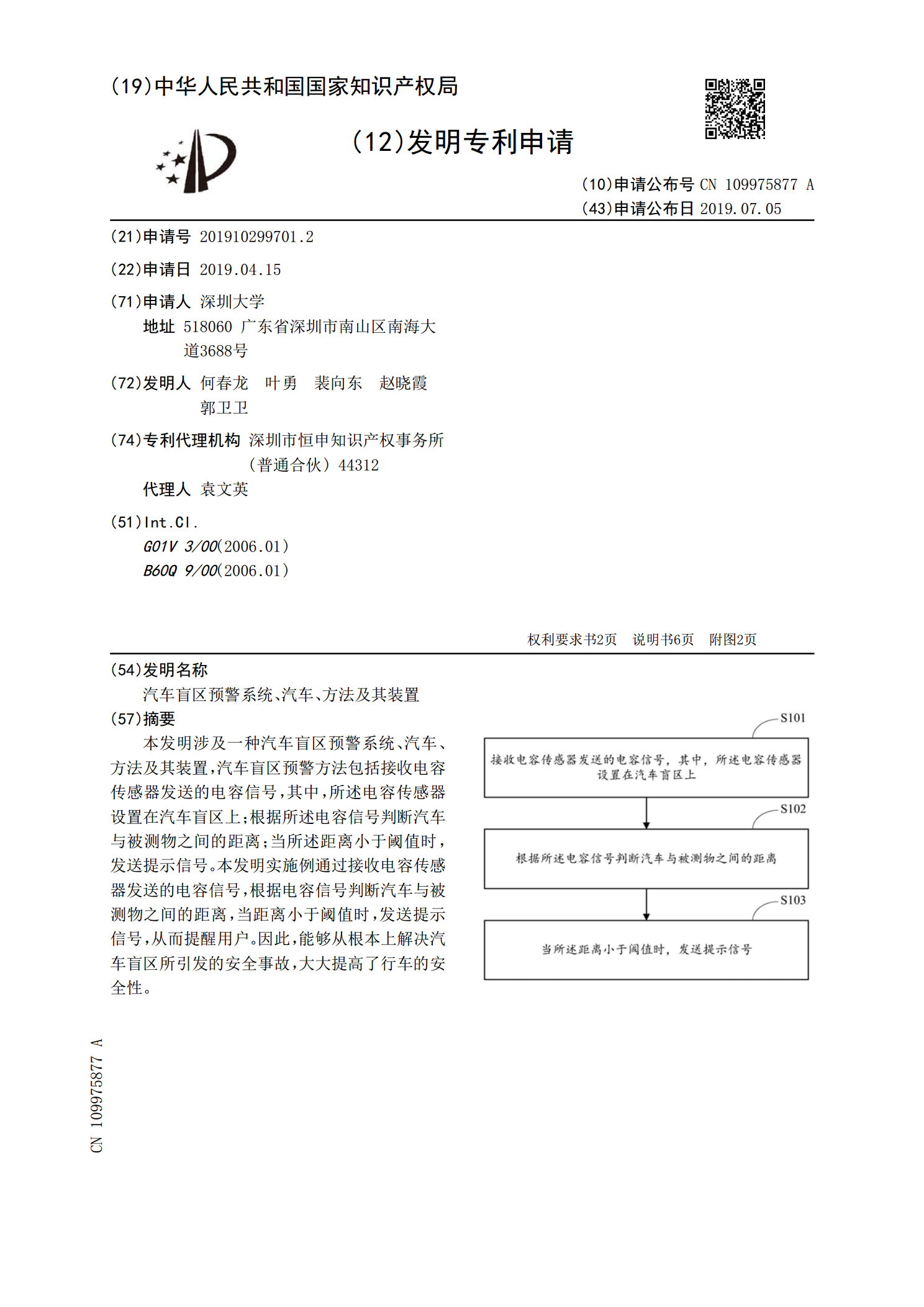
本发明涉及一种汽车盲区预警系统、汽车、方法及其装置,汽车盲区预警方法包括接收电容传感器发送的电容信号,其中,所述电容传感器设置在汽车盲区上;根据所述电容信号判断汽车与被测物之间的距离;当所述距离小于阈值时,发送提示信号。本发明实施例通过接收电容传感器发送的电容信号,根据电容信号判断汽车与被测物之间的距离,当距离小于阈值时,发送提示信号,从而提醒用户。因此,能够从根本上解决汽车盲区所引发的安全事故,大大提高了行车的安全性。
汽车盲区驾驶预警系统及方法.pdf
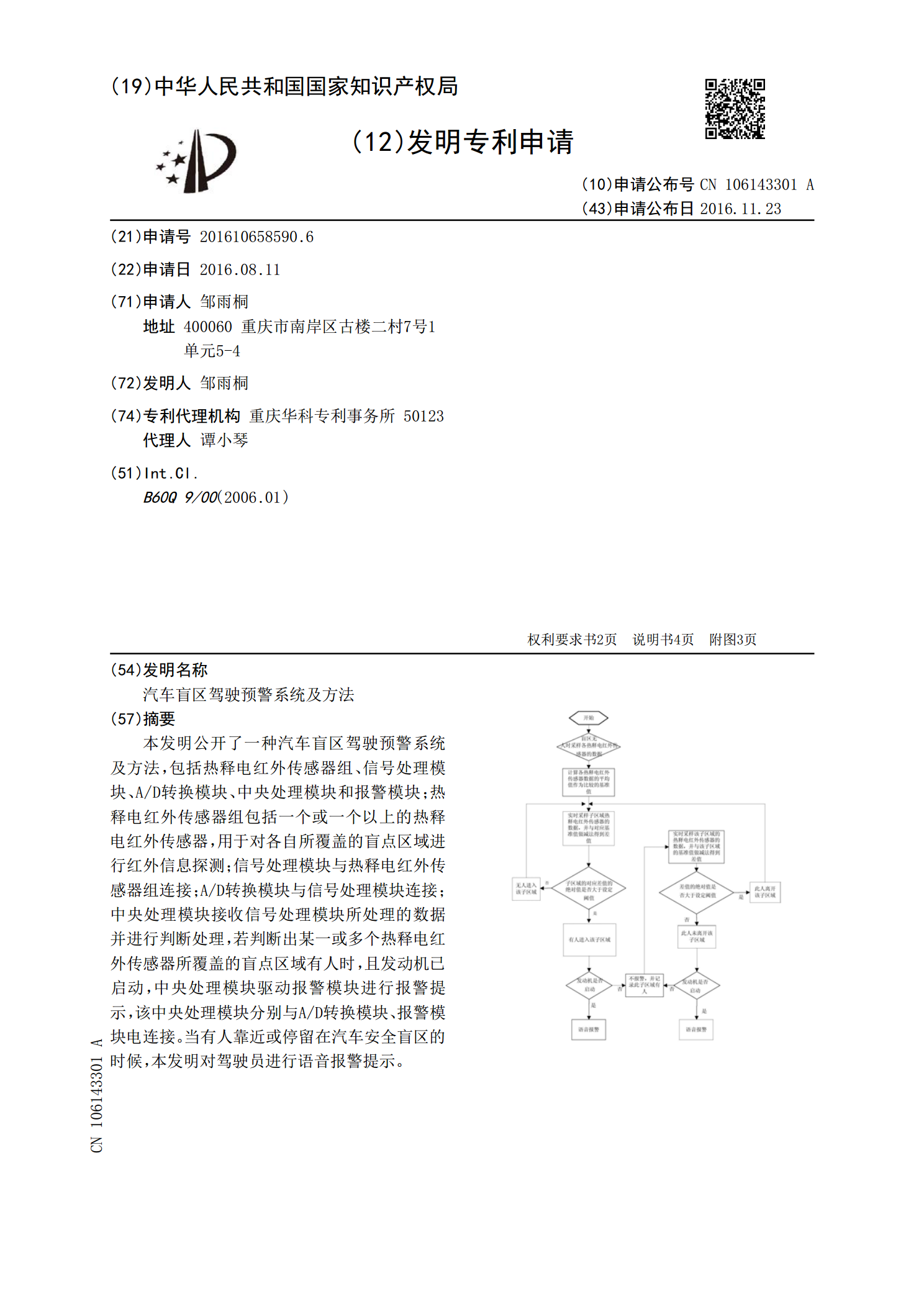
本发明公开了一种汽车盲区驾驶预警系统及方法,包括热释电红外传感器组、信号处理模块、A/D转换模块、中央处理模块和报警模块;热释电红外传感器组包括一个或一个以上的热释电红外传感器,用于对各自所覆盖的盲点区域进行红外信息探测;信号处理模块与热释电红外传感器组连接;A/D转换模块与信号处理模块连接;中央处理模块接收信号处理模块所处理的数据并进行判断处理,若判断出某一或多个热释电红外传感器所覆盖的盲点区域有人时,且发动机已启动,中央处理模块驱动报警模块进行报警提示,该中央处理模块分别与A/D转换模块、报警模块电连
一种汽车盲区观察方法及其装置.pdf
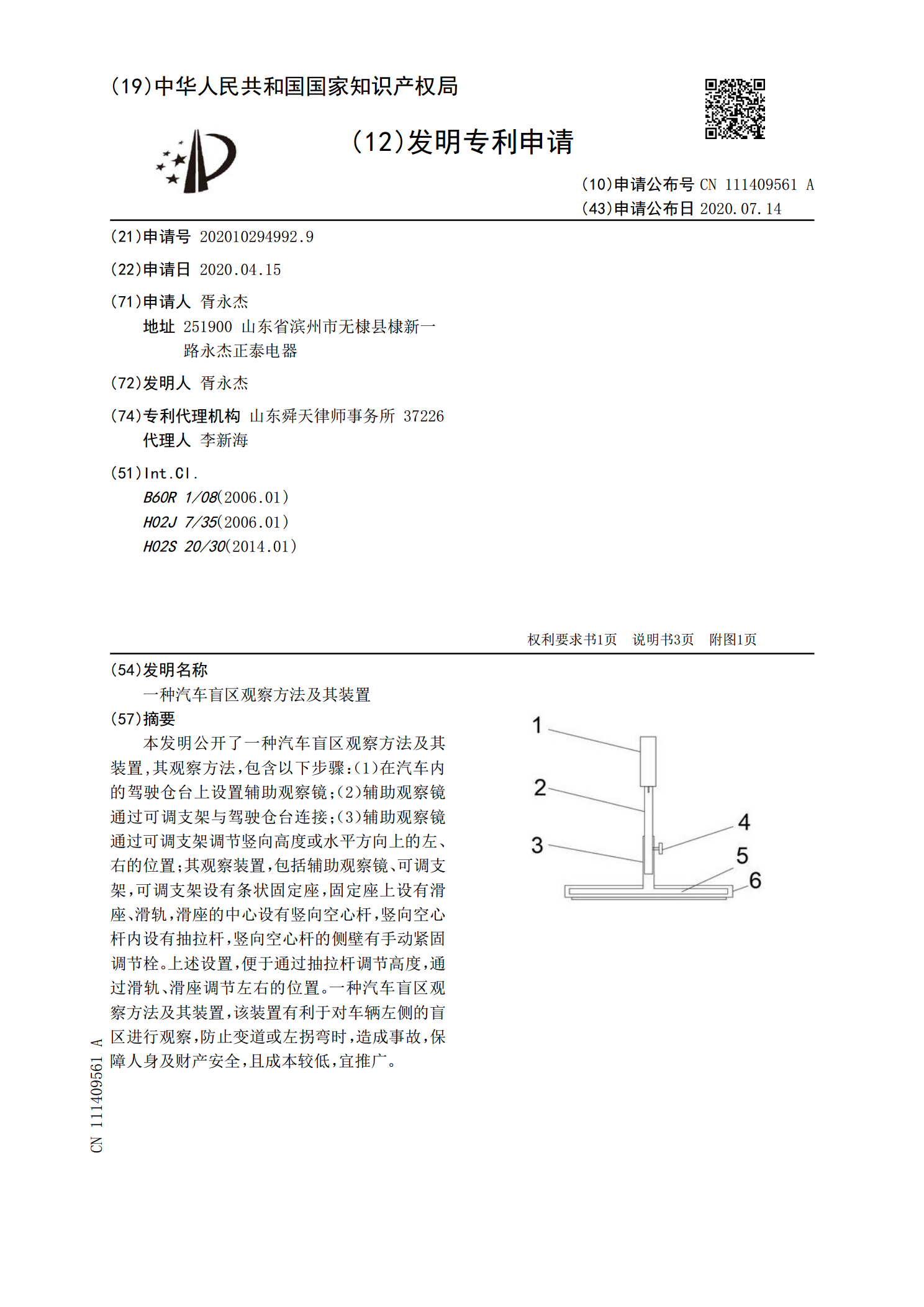
本发明公开了一种汽车盲区观察方法及其装置,其观察方法,包含以下步骤:(1)在汽车内的驾驶仓台上设置辅助观察镜;(2)辅助观察镜通过可调支架与驾驶仓台连接;(3)辅助观察镜通过可调支架调节竖向高度或水平方向上的左、右的位置;其观察装置,包括辅助观察镜、可调支架,可调支架设有条状固定座,固定座上设有滑座、滑轨,滑座的中心设有竖向空心杆,竖向空心杆内设有抽拉杆,竖向空心杆的侧壁有手动紧固调节栓。上述设置,便于通过抽拉杆调节高度,通过滑轨、滑座调节左右的位置。一种汽车盲区观察方法及其装置,该装置有利于对车辆左侧的
一种汽车盲区监测预警系统及方法.pdf
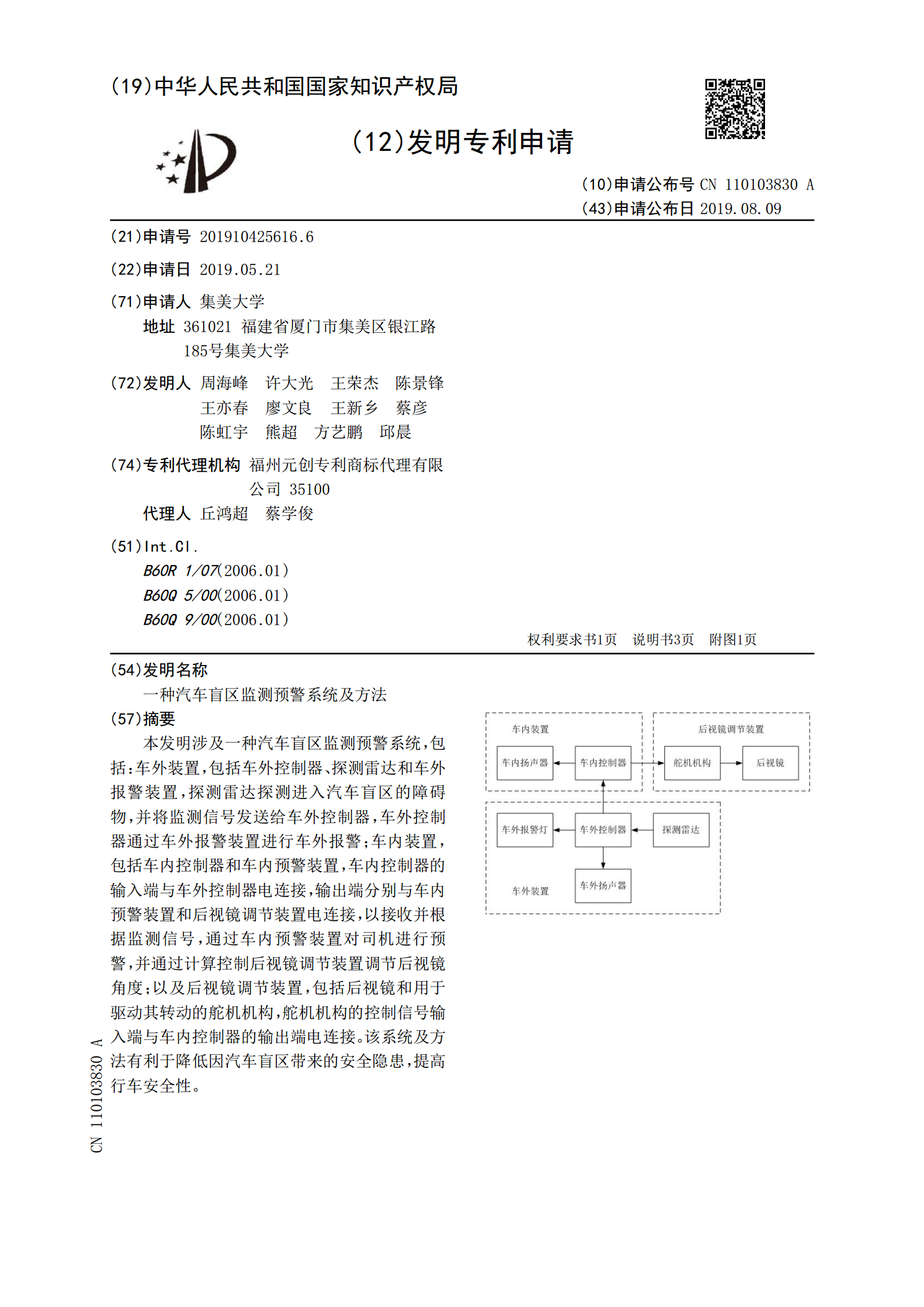
本发明涉及一种汽车盲区监测预警系统,包括:车外装置,包括车外控制器、探测雷达和车外报警装置,探测雷达探测进入汽车盲区的障碍物,并将监测信号发送给车外控制器,车外控制器通过车外报警装置进行车外报警;车内装置,包括车内控制器和车内预警装置,车内控制器的输入端与车外控制器电连接,输出端分别与车内预警装置和后视镜调节装置电连接,以接收并根据监测信号,通过车内预警装置对司机进行预警,并通过计算控制后视镜调节装置调节后视镜角度;以及后视镜调节装置,包括后视镜和用于驱动其转动的舵机机构,舵机机构的控制信号输入端与车内控
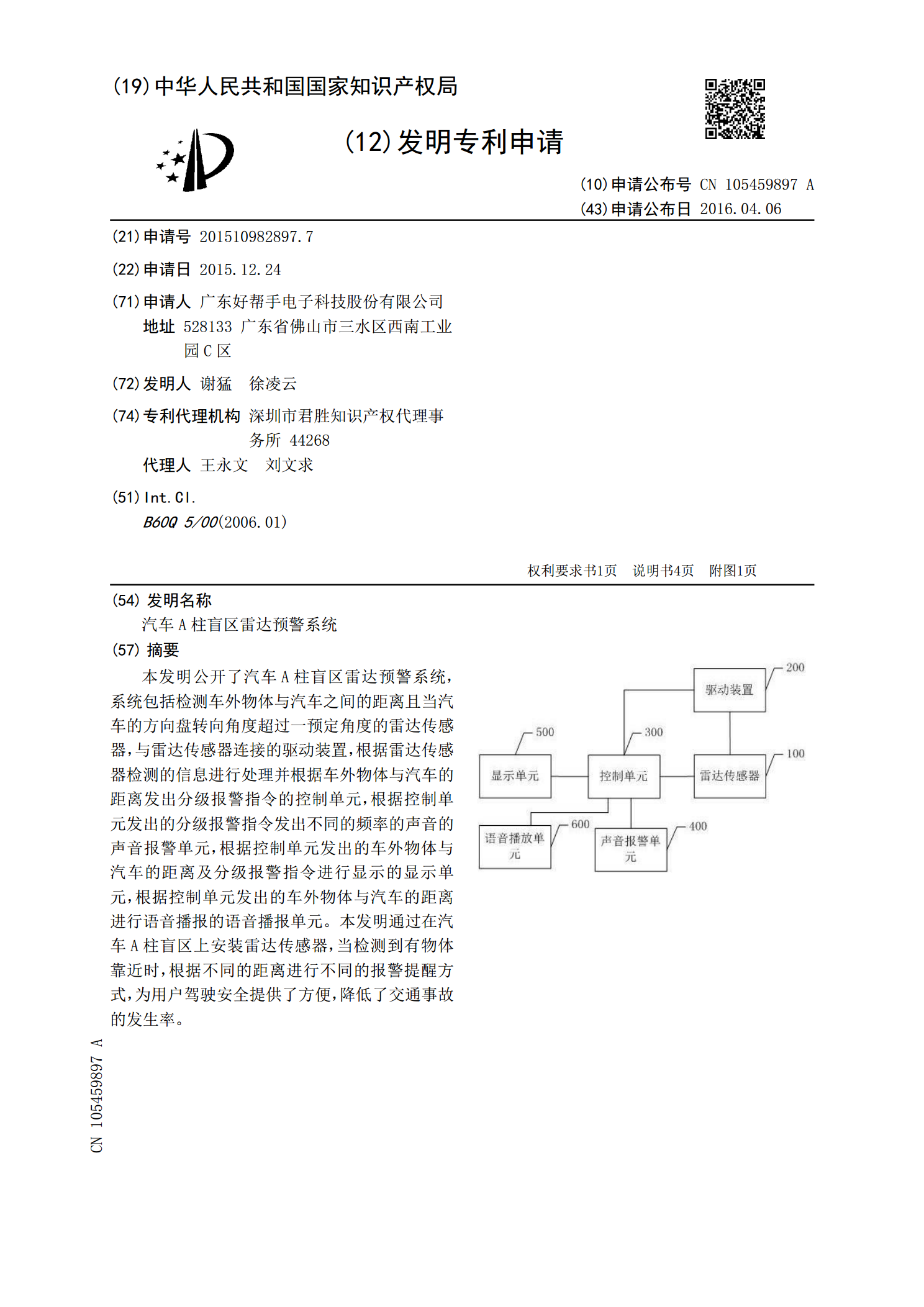
汽车A柱盲区雷达预警系统.pdf
本发明公开了汽车A柱盲区雷达预警系统,系统包括检测车外物体与汽车之间的距离且当汽车的方向盘转向角度超过一预定角度的雷达传感器,与雷达传感器连接的驱动装置,根据雷达传感器检测的信息进行处理并根据车外物体与汽车的距离发出分级报警指令的控制单元,根据控制单元发出的分级报警指令发出不同的频率的声音的声音报警单元,根据控制单元发出的车外物体与汽车的距离及分级报警指令进行显示的显示单元,根据控制单元发出的车外物体与汽车的距离进行语音播报的语音播报单元。本发明通过在汽车A柱盲区上安装雷达传感器,当检测到有物体靠近时,根