
一种光路结构、光路结构的使用方法、测量系统和方法.pdf

宁馨****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种光路结构、光路结构的使用方法、测量系统和方法.pdf
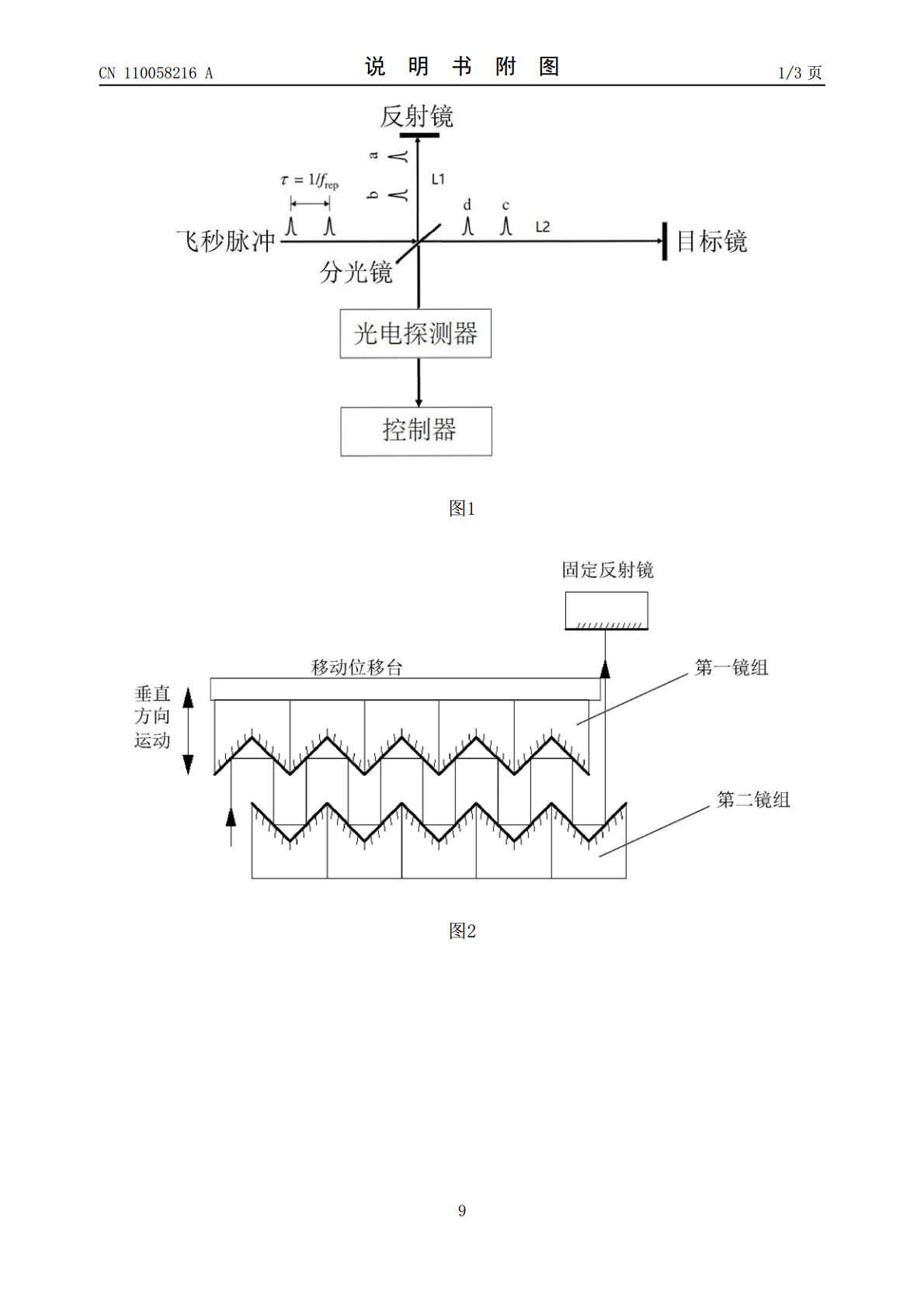
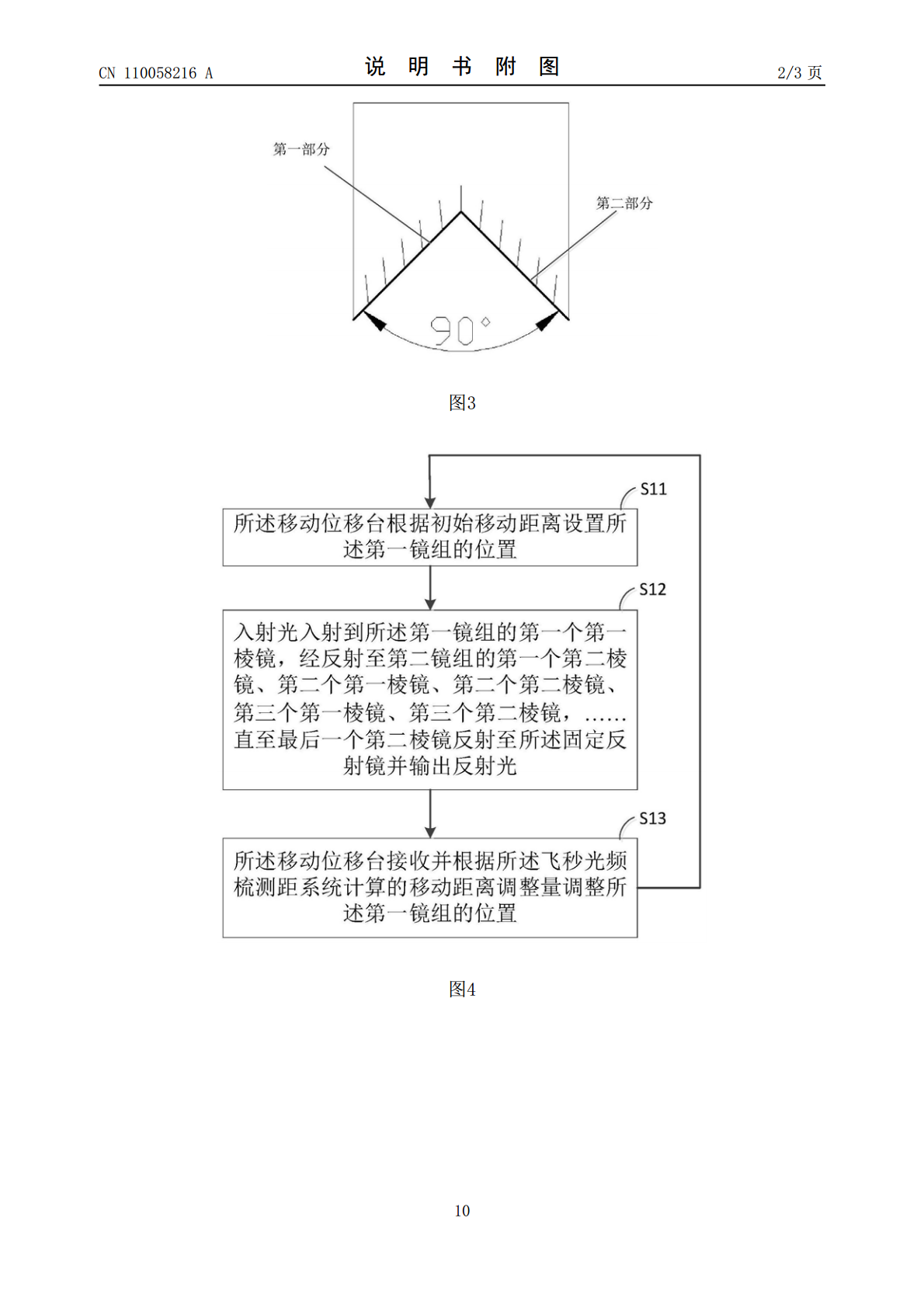
本发明公开了一种光路结构、光路结构的使用方法、测量系统和方法,所述光路结构包括第一镜组、第二镜组、固定反射镜和移动位移台,其中第一镜组和第二镜组分别包括多个第一棱镜和第二棱镜,第二镜组的棱镜个数与第一镜组的棱镜个数相等,第二镜组相对于所述第一镜组平行排列,第二镜组的第二棱镜的位置与所述第一镜组的第一棱镜的位置对应设置,第二镜组的棱镜位置延迟于所述第一镜组的棱镜位置;固定反射镜,接收反射光,与第二镜组的最后一个棱镜的位置相对应;移动位移台,带动第二镜组相对于所述第一镜组的垂直方向移动以改变所述第一镜组和第二
光路结构.pdf
本发明公开了一种光路结构,其包括一端开口的腔体,腔体相对于开口的另一端,设置有第一通孔或第一缺口,和第一LED,第一LED发出的光线通过第一通孔或第一缺口射入腔体,腔体的侧面也设置有第二通孔或第二缺口,和第二LED,第二LED发出的光线通过第二通孔或第二缺口射入腔体,腔体内还设置有分光镜或双向色镜,第一LED发出的光线直接通过分光镜或双向色镜,从腔体的开口射出,第二LED发出的光线经分光镜或双向色镜反射与第一LED发出的光线融合,其中第一LED和第二LED发出光线到达分光镜或双向色镜的光程相同。本发明通过

一种发射光器件的光路结构.pdf
本发明公开了一种发射光器件的光路结构,具体涉及光路技术领域,包括印制电路板,所述印制电路板的正面设置有基板,所述基板的正面设置有若干个激光器芯片,且激光器芯片的背面与基板的正面固定连接。该光路结构,通过激光器芯片和准直透镜的作用,能够形成准直光,并且形成第一传播方向,而且通过折射棱镜的作用,能够将第一传播方向的光路经过两次折射后,平行于第一传播方向且方向相同或相反的光路传播,形成第二传播方向,再利用光学多路复用器进行传导,进而使得第一传播方向与第二传播方向之间留有一定的空间,便于利用该空间放置更多的光学、
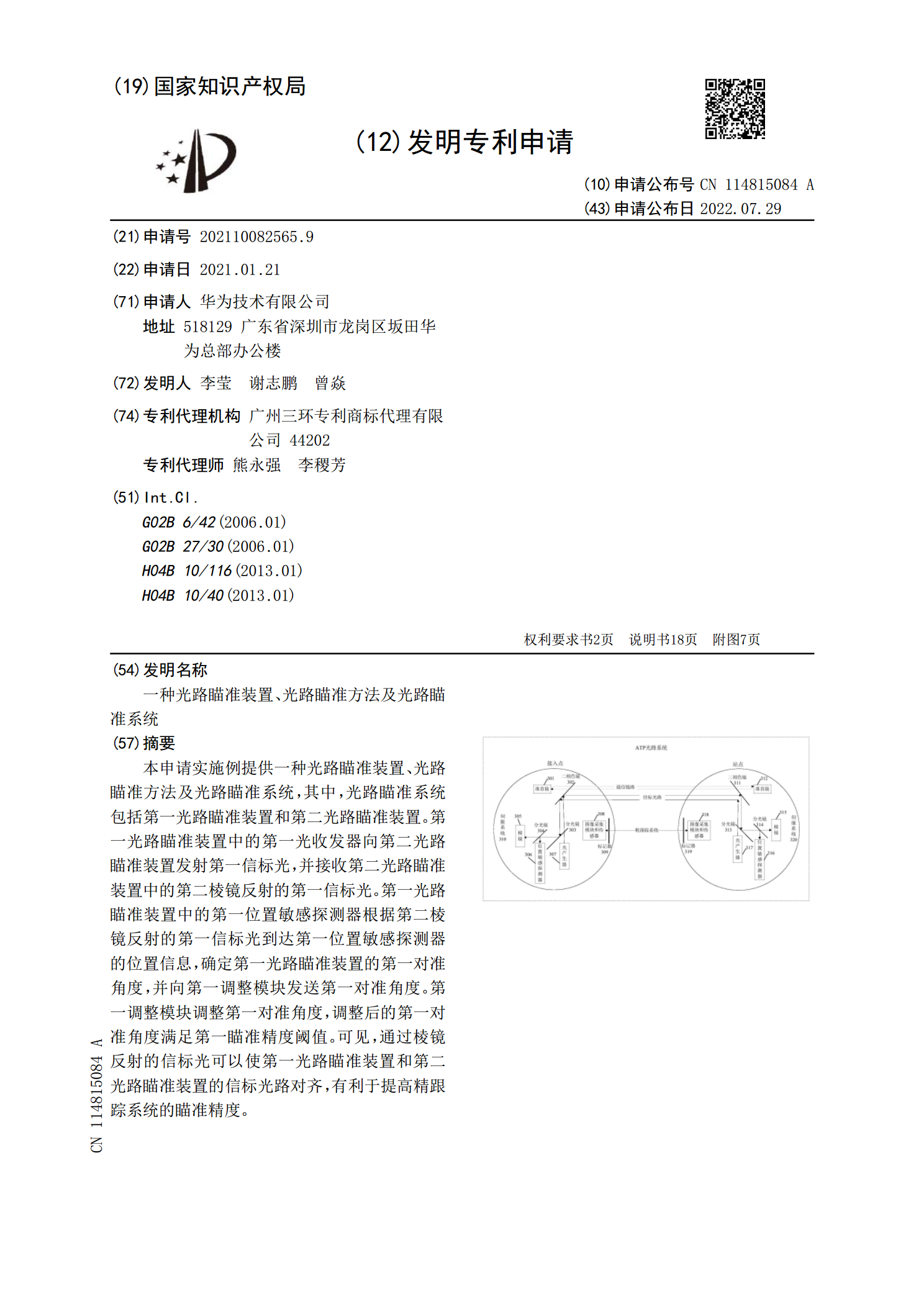
一种光路瞄准装置、光路瞄准方法及光路瞄准系统.pdf
本申请实施例提供一种光路瞄准装置、光路瞄准方法及光路瞄准系统,其中,光路瞄准系统包括第一光路瞄准装置和第二光路瞄准装置。第一光路瞄准装置中的第一光收发器向第二光路瞄准装置发射第一信标光,并接收第二光路瞄准装置中的第二棱镜反射的第一信标光。第一光路瞄准装置中的第一位置敏感探测器根据第二棱镜反射的第一信标光到达第一位置敏感探测器的位置信息,确定第一光路瞄准装置的第一对准角度,并向第一调整模块发送第一对准角度。第一调整模块调整第一对准角度,调整后的第一对准角度满足第一瞄准精度阈值。可见,通过棱镜反射的信标光可以
用于提高测量精度的补偿光路结构.pdf
本公开描述了一种用于提高测量精度的补偿光路结构,重建装置包括用于获取目标点的初始高度的测量光路结构和补偿光路结构,补偿光路结构包括第一发生模块、分光模块、干涉物镜、以及数据处理模块,第一发生模块用于产生带宽不大于第一预设值的补偿光束,分光模块包括第一分光单元和第二分光单元,第一分光单元配置为接收补偿光束并将补偿光束反射至干涉物镜,补偿光束在干涉物镜形成补偿反射光束,数据处理模块基于补偿反射光束对初始高度进行补偿以获得综合测量高度。根据本公开,能够提供一种对目标点的测量高度进行补偿以提高目标点的测量精度的补