
一种柔性手术终端模块及喉部微创手术柔性机器人.pdf

是丹****ni


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种柔性手术终端模块及喉部微创手术柔性机器人.pdf
本发明提供一种柔性手术终端模块,包括一柔性臂以及弯曲驱动机构,所述弯曲驱动机构驱动所述柔性臂向指定方向进行弯曲;所述柔性臂包括若干弯曲控制环、波纹管及套筒。本发明还提供一种喉部微创手术柔性机器人,包括直线运动模块、旋转运动模块、柔性手术终端模块以及手术器械通道模块。本发明通过柔性手术终端模块、直线运动模块、旋转运动模块配合,扩大手术视野,使得边缘病灶区域得以暴露,解决传统喉部手术中存在的视觉盲区与操作盲区等问题,提高手术质量,提高手术操作精度;通过手术器械通道模块内的多通道的设计,便于柔性手术器械的更换与

一种柔性单孔微创手术机器人.pdf
本发明公开了一种柔性单孔微创手术机器人。该机器人系统包括:多个(编号1至20)柔性单元体、21柔性单元体底座、22顶盘、23导轨、24‑1轴承座、25镍钛合金丝、26螺栓、27‑1丝杆、28‑1丝杆法兰螺母、29‑1法兰螺母座、30螺栓、31‑1轴承座、32、半球壳、33‑1电机、34‑1轴承座支撑架、35‑1联轴器、36底座、多个(编号37至55)弹簧组(每组3个);本发明机器人关节单元包含的两个旋转轴之间的夹角具有可调功能。本发明的机器人关节灵活性好,柔性部分硬度高,运动灵活多变。
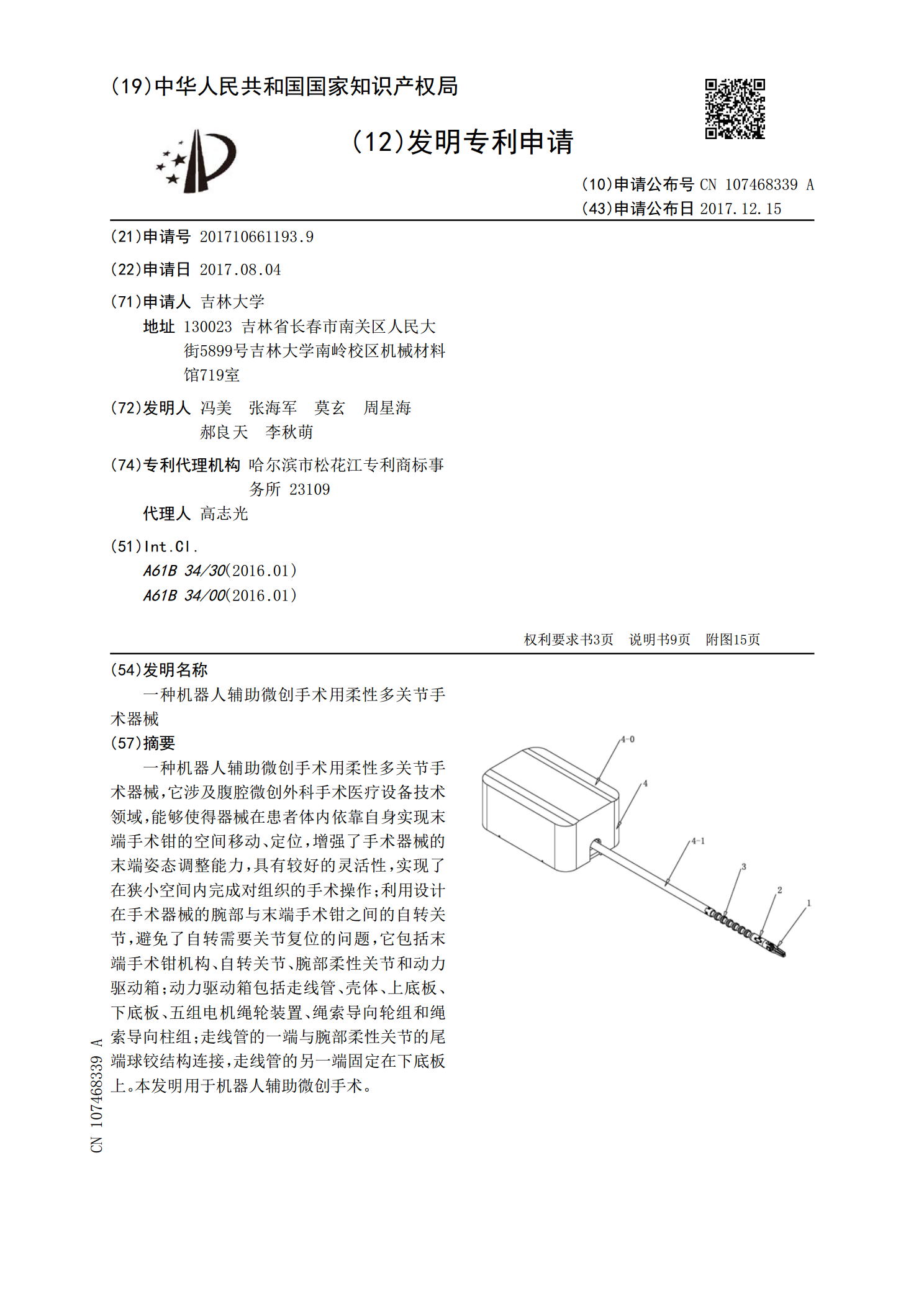
一种机器人辅助微创手术用柔性多关节手术器械.pdf
一种机器人辅助微创手术用柔性多关节手术器械,它涉及腹腔微创外科手术医疗设备技术领域,能够使得器械在患者体内依靠自身实现末端手术钳的空间移动、定位,增强了手术器械的末端姿态调整能力,具有较好的灵活性,实现了在狭小空间内完成对组织的手术操作;利用设计在手术器械的腕部与末端手术钳之间的自转关节,避免了自转需要关节复位的问题,它包括末端手术钳机构、自转关节、腕部柔性关节和动力驱动箱;动力驱动箱包括走线管、壳体、上底板、下底板、五组电机绳轮装置、绳索导向轮组和绳索导向柱组;走线管的一端与腕部柔性关节的尾端球铰结构连
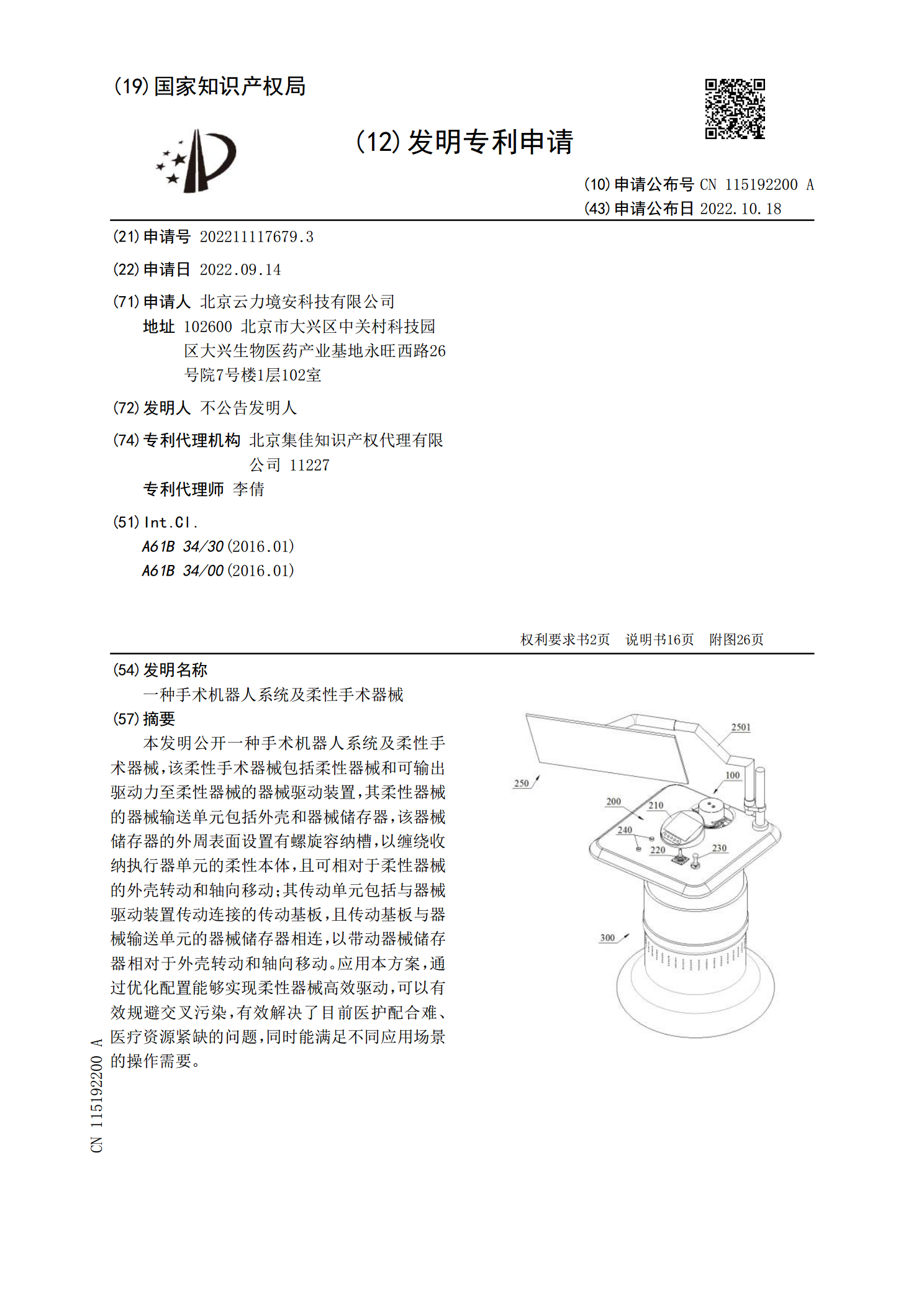
一种手术机器人系统及柔性手术器械.pdf
本发明公开一种手术机器人系统及柔性手术器械,该柔性手术器械包括柔性器械和可输出驱动力至柔性器械的器械驱动装置,其柔性器械的器械输送单元包括外壳和器械储存器,该器械储存器的外周表面设置有螺旋容纳槽,以缠绕收纳执行器单元的柔性本体,且可相对于柔性器械的外壳转动和轴向移动;其传动单元包括与器械驱动装置传动连接的传动基板,且传动基板与器械输送单元的器械储存器相连,以带动器械储存器相对于外壳转动和轴向移动。应用本方案,通过优化配置能够实现柔性器械高效驱动,可以有效规避交叉污染,有效解决了目前医护配合难、医疗资源紧缺
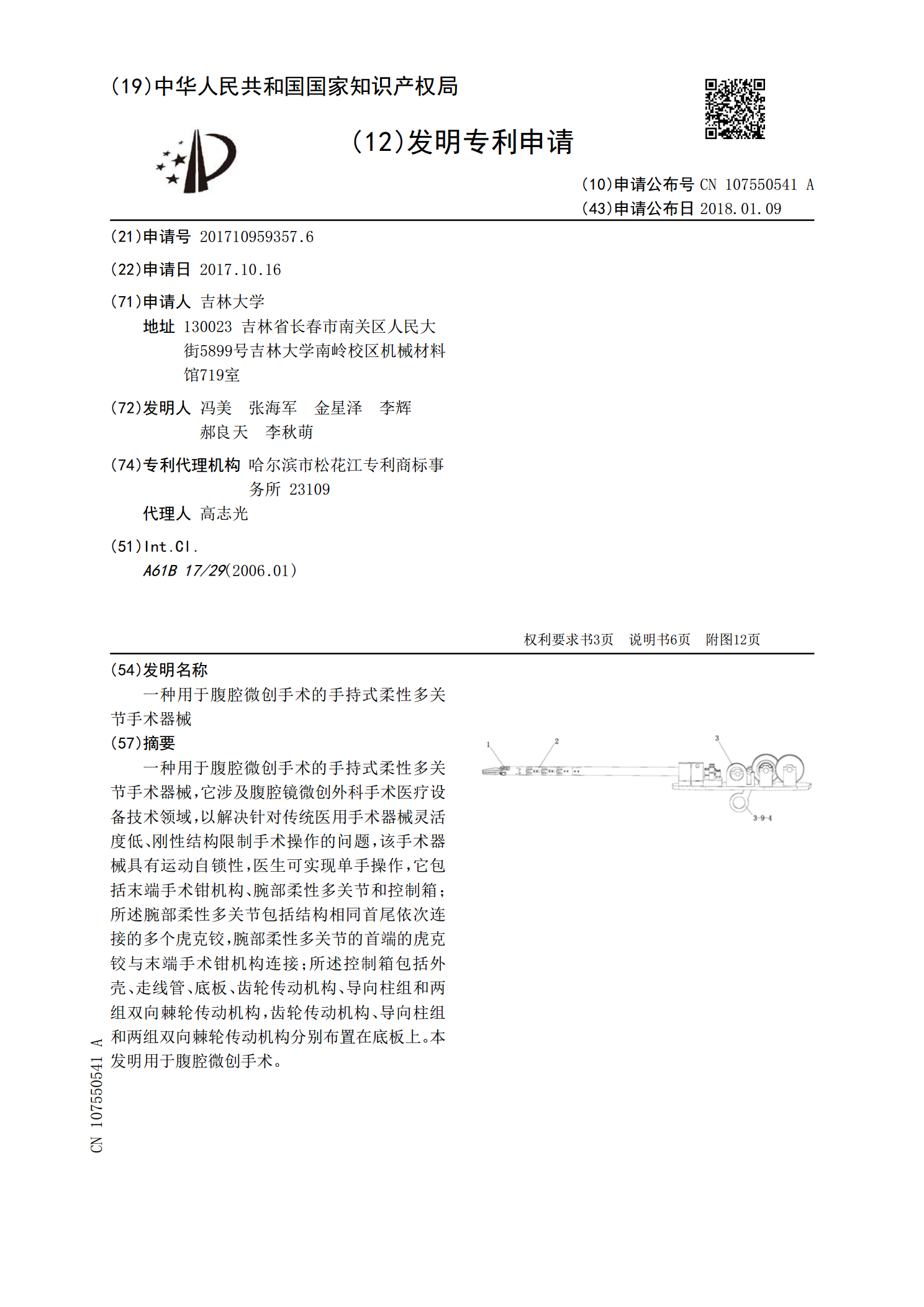
一种用于腹腔微创手术的手持式柔性多关节手术器械.pdf
一种用于腹腔微创手术的手持式柔性多关节手术器械,它涉及腹腔镜微创外科手术医疗设备技术领域,以解决针对传统医用手术器械灵活度低、刚性结构限制手术操作的问题,该手术器械具有运动自锁性,医生可实现单手操作,它包括末端手术钳机构、腕部柔性多关节和控制箱;所述腕部柔性多关节包括结构相同首尾依次连接的多个虎克铰,腕部柔性多关节的首端的虎克铰与末端手术钳机构连接;所述控制箱包括外壳、走线管、底板、齿轮传动机构、导向柱组和两组双向棘轮传动机构,齿轮传动机构、导向柱组和两组双向棘轮传动机构分别布置在底板上。本发明用于腹腔微