
一种用于腹腔微创手术的手持式柔性多关节手术器械.pdf

一条****贺6

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于腹腔微创手术的手持式柔性多关节手术器械.pdf
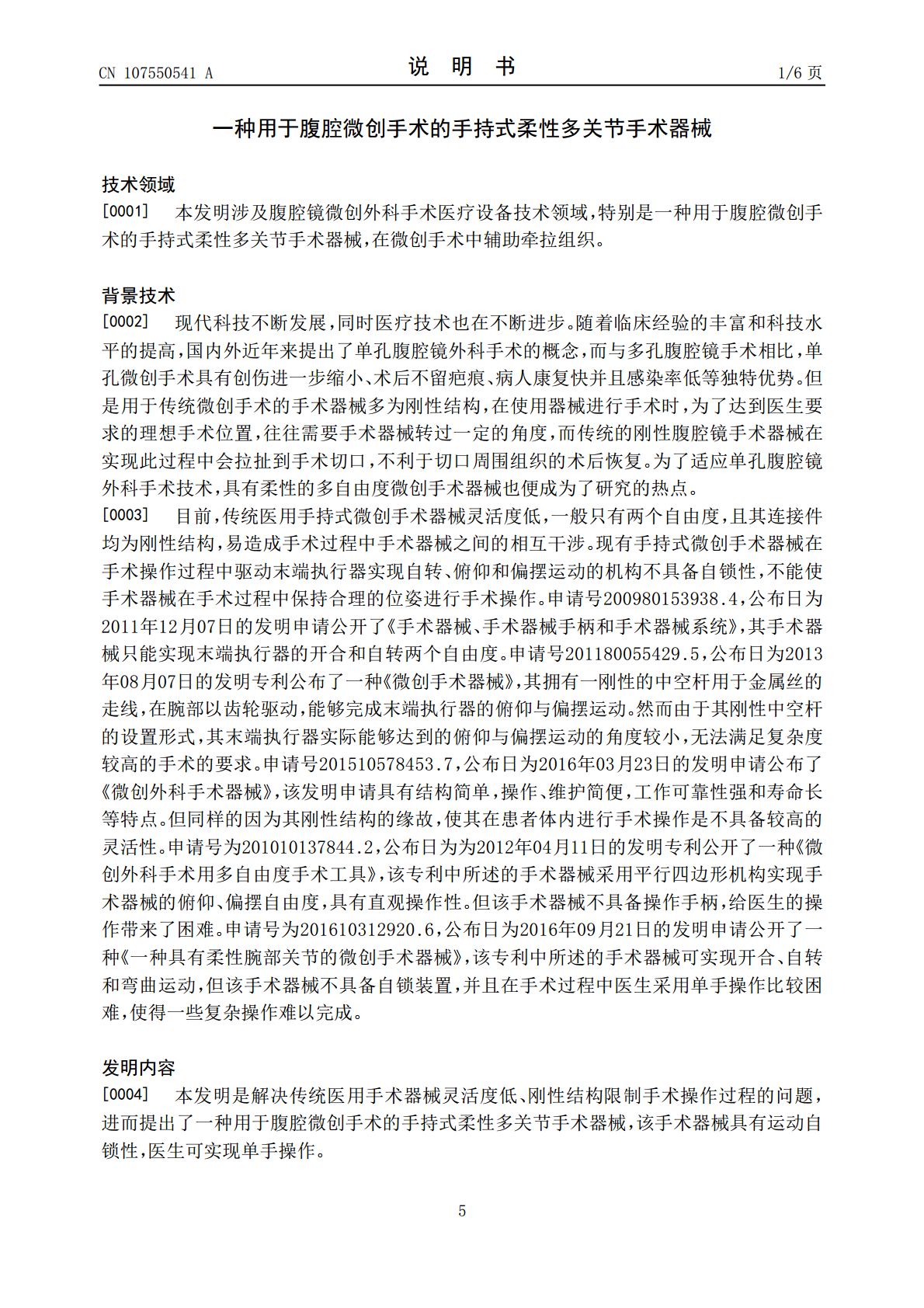
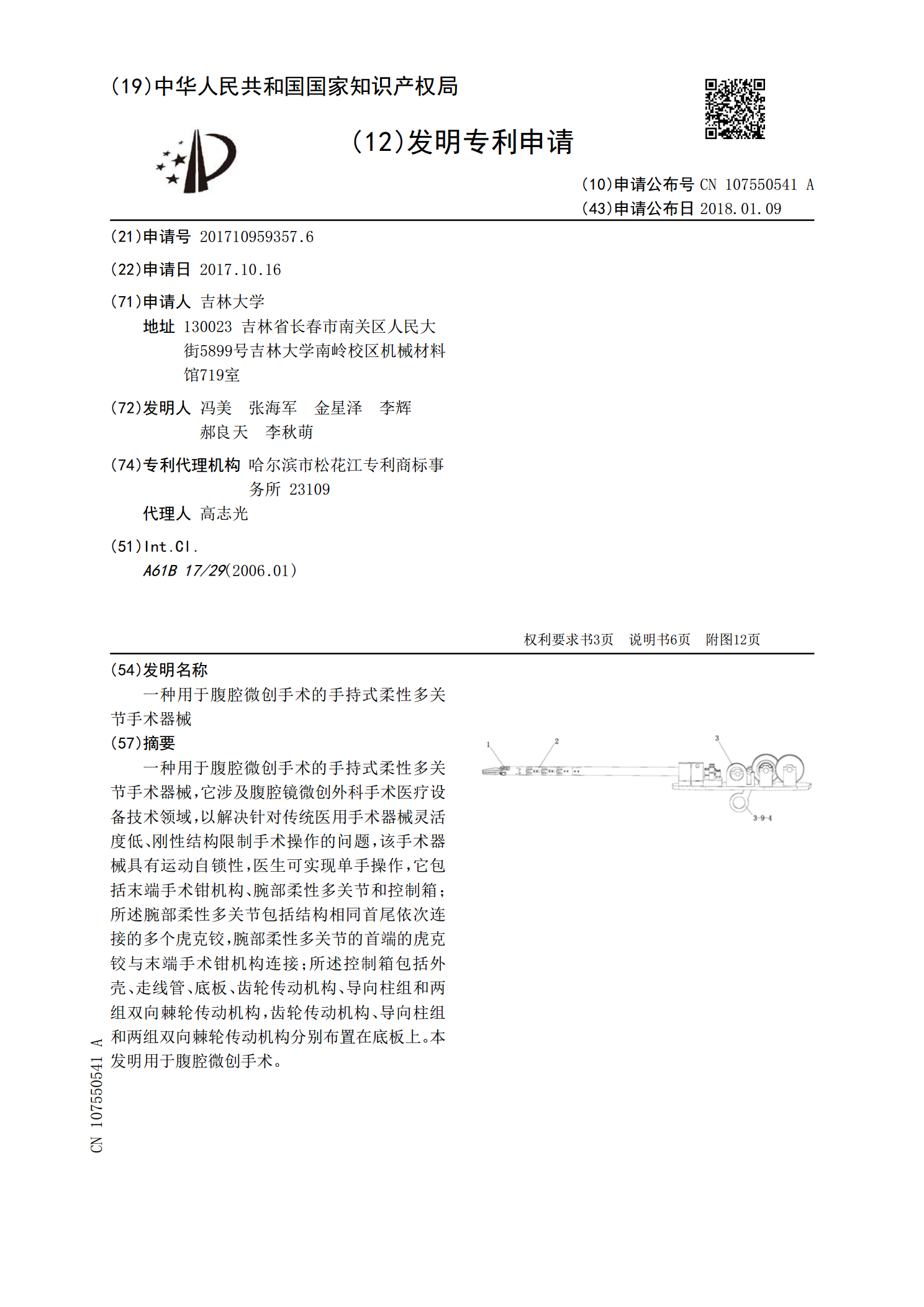
一种用于腹腔微创手术的手持式柔性多关节手术器械,它涉及腹腔镜微创外科手术医疗设备技术领域,以解决针对传统医用手术器械灵活度低、刚性结构限制手术操作的问题,该手术器械具有运动自锁性,医生可实现单手操作,它包括末端手术钳机构、腕部柔性多关节和控制箱;所述腕部柔性多关节包括结构相同首尾依次连接的多个虎克铰,腕部柔性多关节的首端的虎克铰与末端手术钳机构连接;所述控制箱包括外壳、走线管、底板、齿轮传动机构、导向柱组和两组双向棘轮传动机构,齿轮传动机构、导向柱组和两组双向棘轮传动机构分别布置在底板上。本发明用于腹腔微
多自由度柔性手持式微创手术器械.pdf
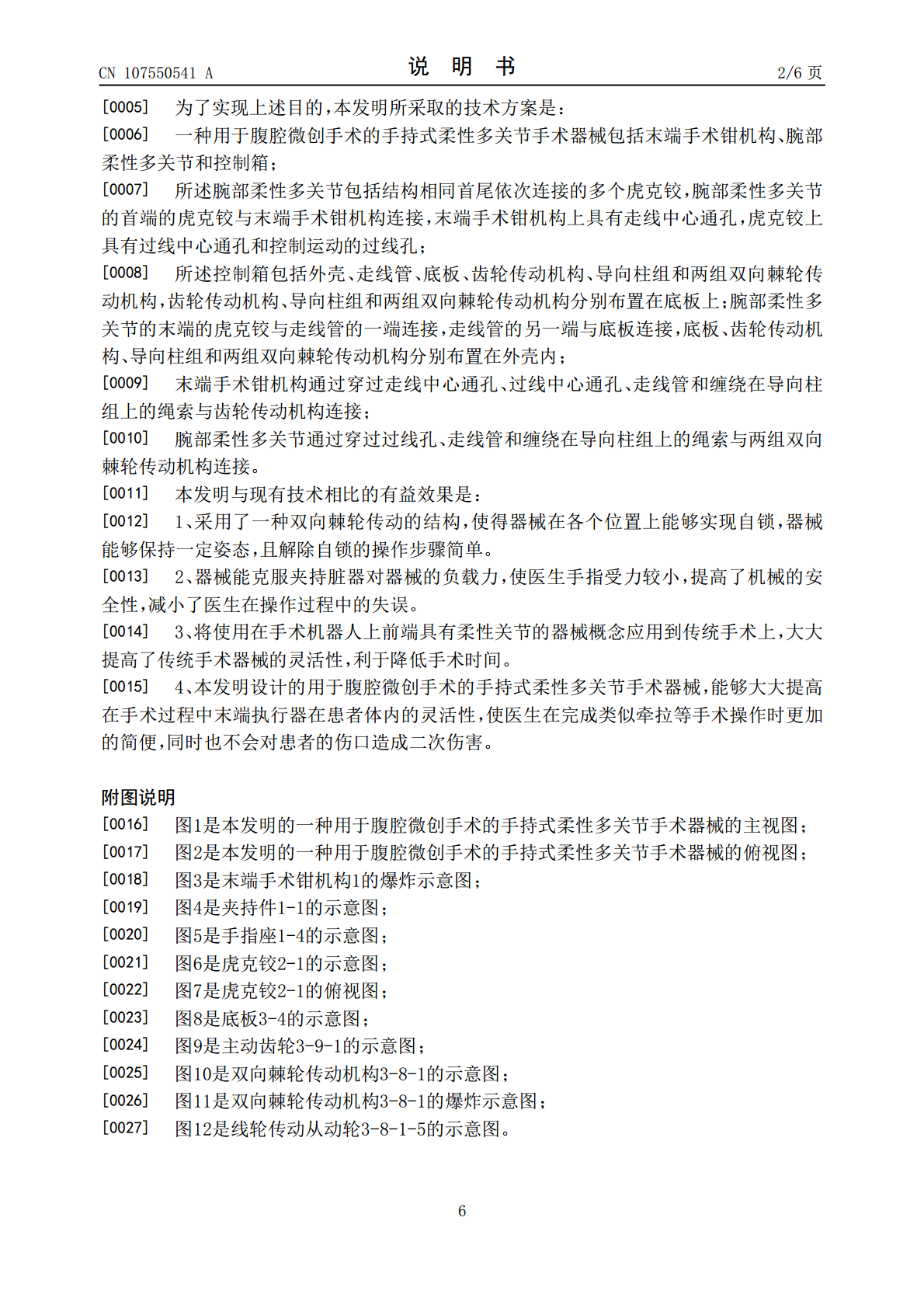
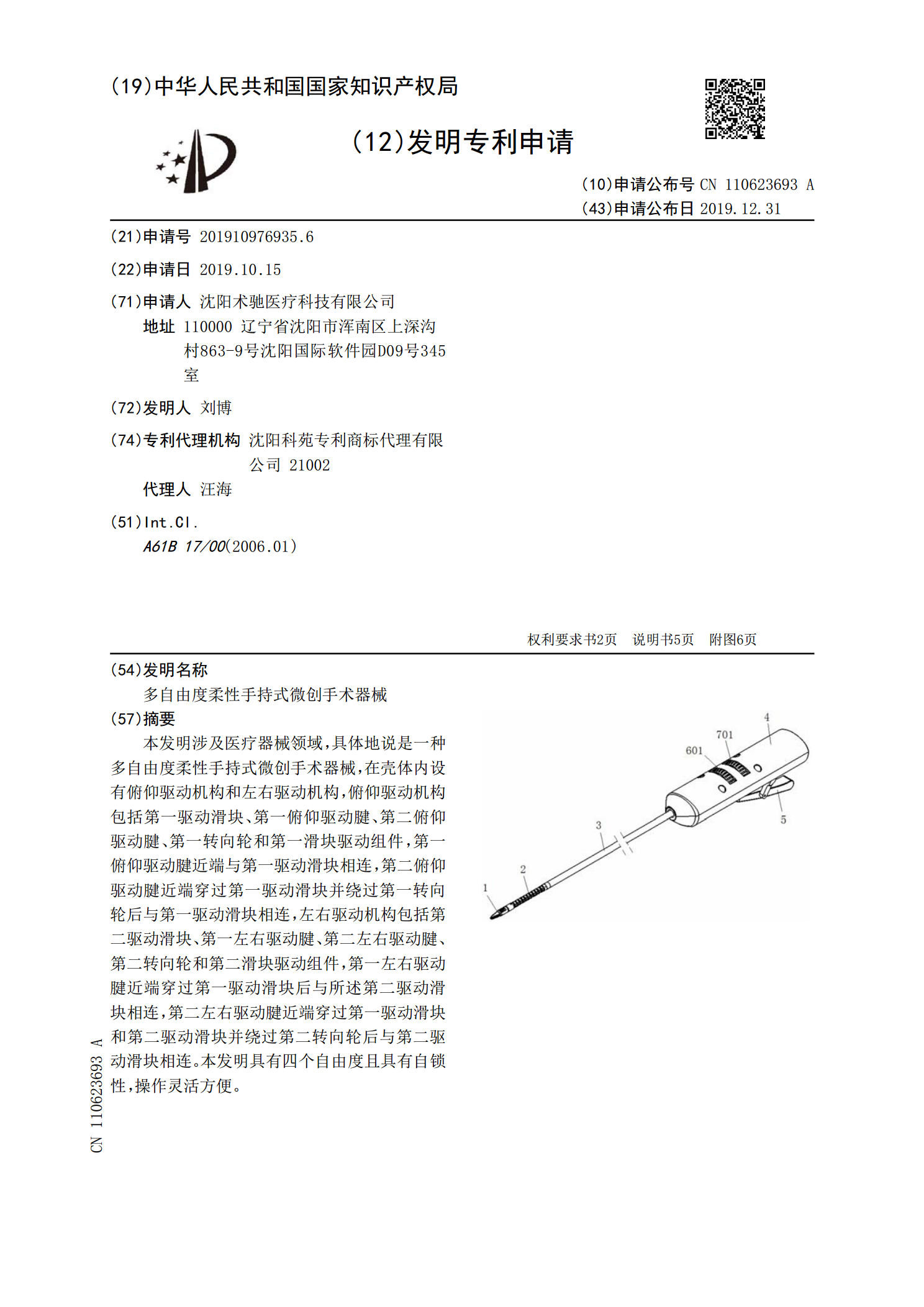
本发明涉及医疗器械领域,具体地说是一种多自由度柔性手持式微创手术器械,在壳体内设有俯仰驱动机构和左右驱动机构,俯仰驱动机构包括第一驱动滑块、第一俯仰驱动腱、第二俯仰驱动腱、第一转向轮和第一滑块驱动组件,第一俯仰驱动腱近端与第一驱动滑块相连,第二俯仰驱动腱近端穿过第一驱动滑块并绕过第一转向轮后与第一驱动滑块相连,左右驱动机构包括第二驱动滑块、第一左右驱动腱、第二左右驱动腱、第二转向轮和第二滑块驱动组件,第一左右驱动腱近端穿过第一驱动滑块后与所述第二驱动滑块相连,第二左右驱动腱近端穿过第一驱动滑块和第二驱动滑
一种机器人辅助微创手术用柔性多关节手术器械.pdf
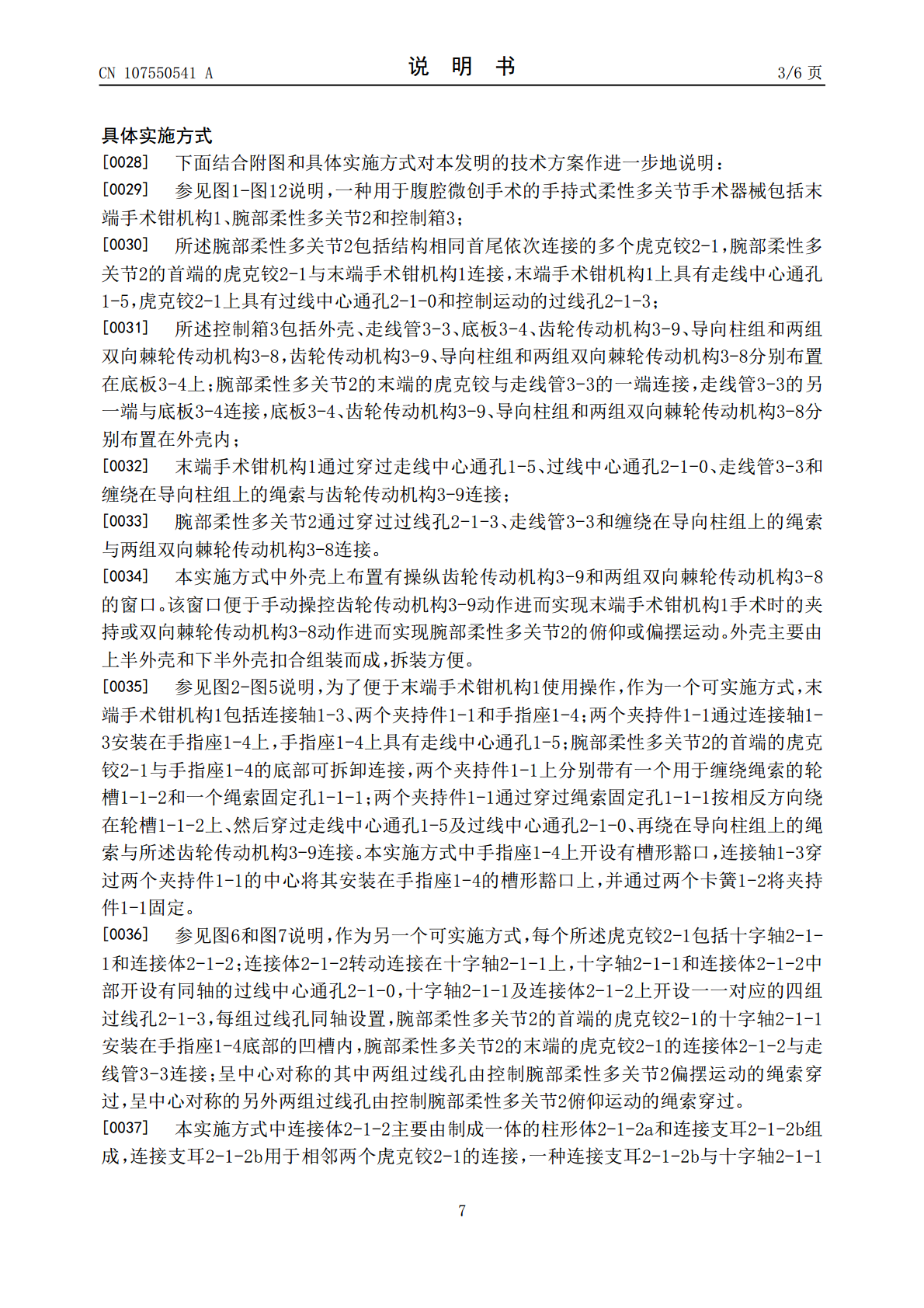
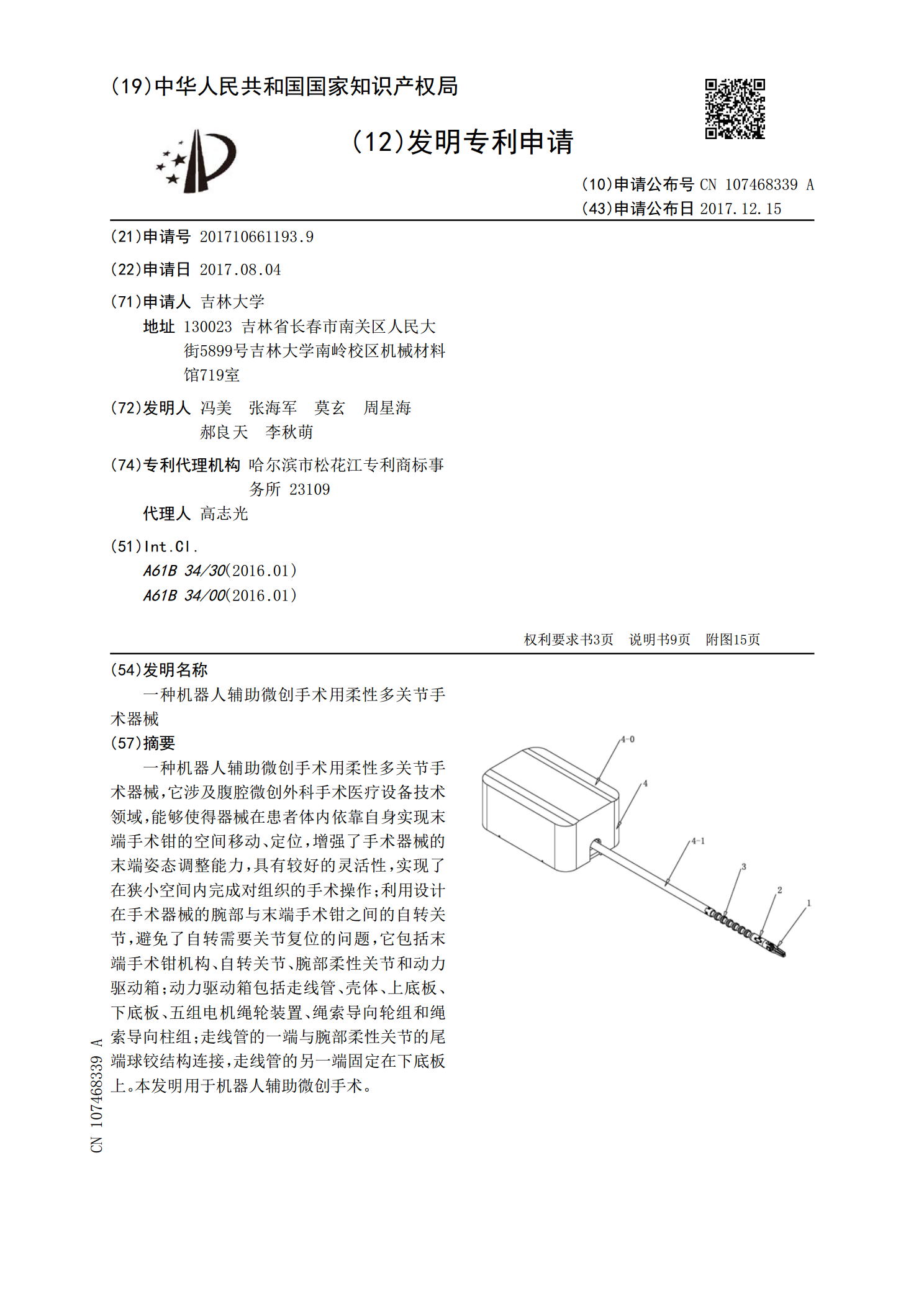
一种机器人辅助微创手术用柔性多关节手术器械,它涉及腹腔微创外科手术医疗设备技术领域,能够使得器械在患者体内依靠自身实现末端手术钳的空间移动、定位,增强了手术器械的末端姿态调整能力,具有较好的灵活性,实现了在狭小空间内完成对组织的手术操作;利用设计在手术器械的腕部与末端手术钳之间的自转关节,避免了自转需要关节复位的问题,它包括末端手术钳机构、自转关节、腕部柔性关节和动力驱动箱;动力驱动箱包括走线管、壳体、上底板、下底板、五组电机绳轮装置、绳索导向轮组和绳索导向柱组;走线管的一端与腕部柔性关节的尾端球铰结构连
一种多通道柔性单孔腹腔微创手术隐形内镜通道.pdf
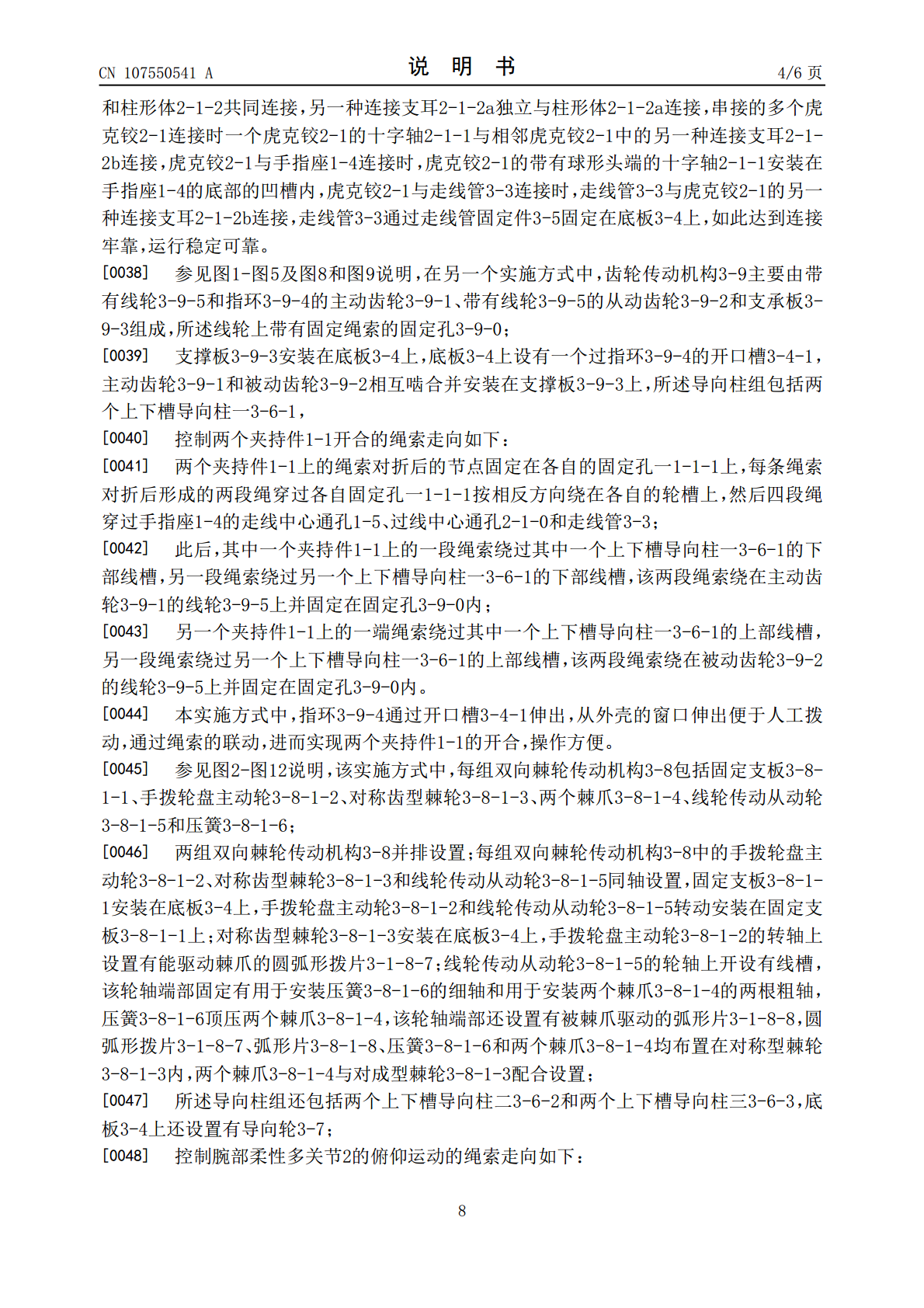
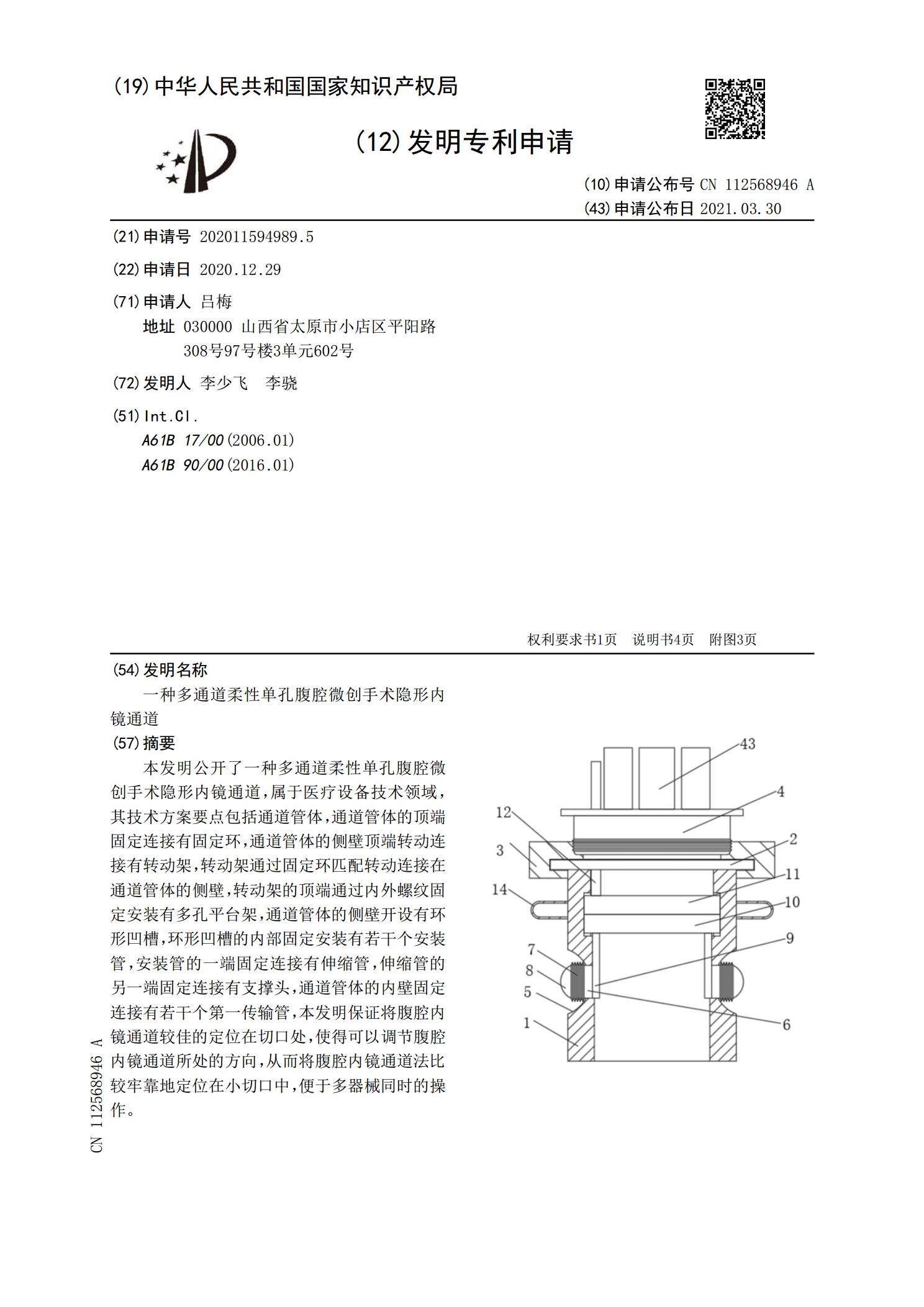
本发明公开了一种多通道柔性单孔腹腔微创手术隐形内镜通道,属于医疗设备技术领域,其技术方案要点包括通道管体,通道管体的顶端固定连接有固定环,通道管体的侧壁顶端转动连接有转动架,转动架通过固定环匹配转动连接在通道管体的侧壁,转动架的顶端通过内外螺纹固定安装有多孔平台架,通道管体的侧壁开设有环形凹槽,环形凹槽的内部固定安装有若干个安装管,安装管的一端固定连接有伸缩管,伸缩管的另一端固定连接有支撑头,通道管体的内壁固定连接有若干个第一传输管,本发明保证将腹腔内镜通道较佳的定位在切口处,使得可以调节腹腔内镜通道所处
腹腔微创手术机器人用夹钳式手术器械.pdf
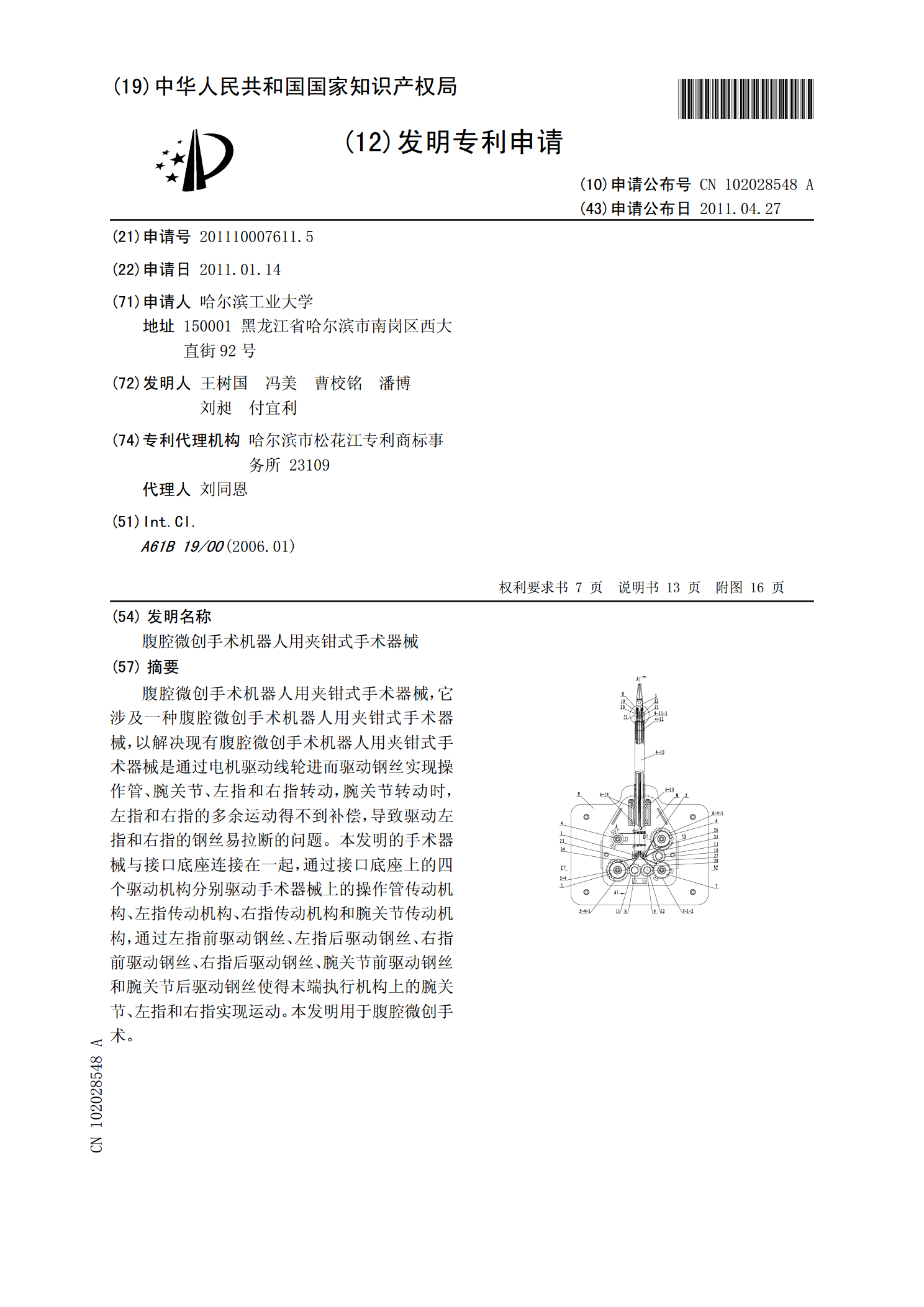
腹腔微创手术机器人用夹钳式手术器械,它涉及一种腹腔微创手术机器人用夹钳式手术器械,以解决现有腹腔微创手术机器人用夹钳式手术器械是通过电机驱动线轮进而驱动钢丝实现操作管、腕关节、左指和右指转动,腕关节转动时,左指和右指的多余运动得不到补偿,导致驱动左指和右指的钢丝易拉断的问题。本发明的手术器械与接口底座连接在一起,通过接口底座上的四个驱动机构分别驱动手术器械上的操作管传动机构、左指传动机构、右指传动机构和腕关节传动机构,通过左指前驱动钢丝、左指后驱动钢丝、右指前驱动钢丝、右指后驱动钢丝、腕关节前驱动钢丝和腕