
无人车避碰方法和装置.pdf

代瑶****zy

1/10
2/10
3/10
4/10
5/10
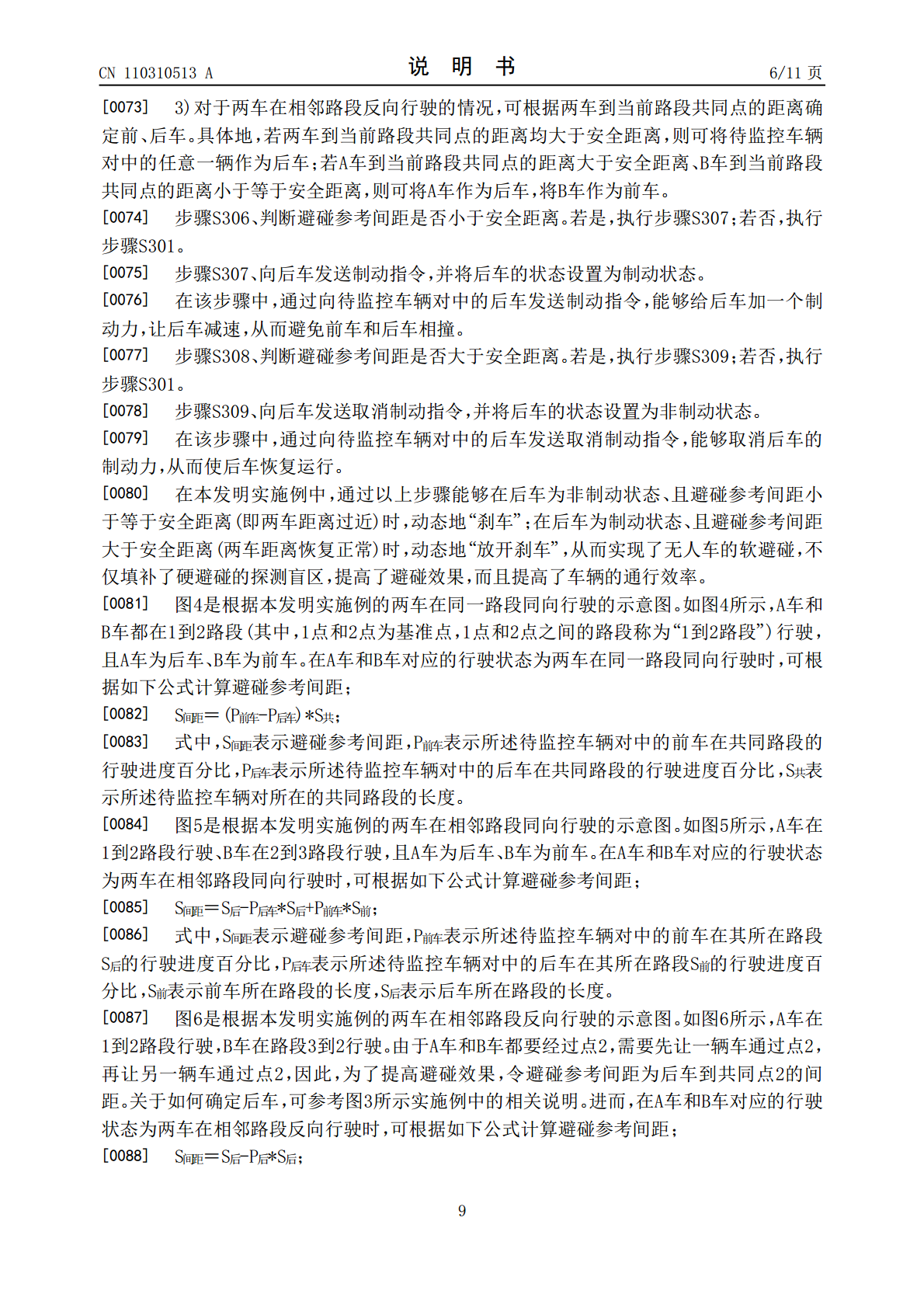
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人车避碰方法和装置.pdf
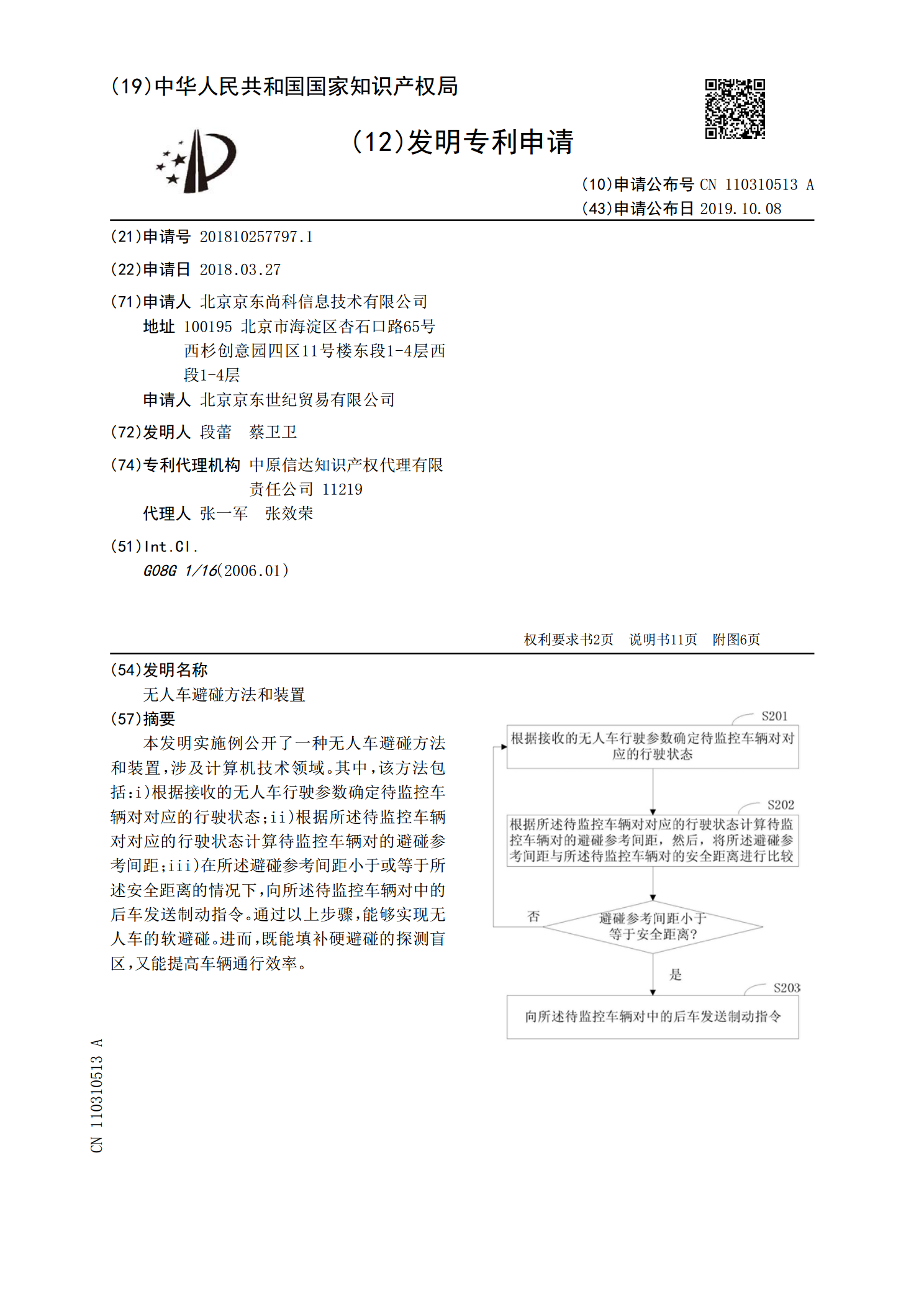
本发明实施例公开了一种无人车避碰方法和装置,涉及计算机技术领域。其中,该方法包括:i)根据接收的无人车行驶参数确定待监控车辆对对应的行驶状态;ii)根据所述待监控车辆对对应的行驶状态计算待监控车辆对的避碰参考间距;iii)在所述避碰参考间距小于或等于所述安全距离的情况下,向所述待监控车辆对中的后车发送制动指令。通过以上步骤,能够实现无人车的软避碰。进而,既能填补硬避碰的探测盲区,又能提高车辆通行效率。
无人车调度方法和装置.pdf
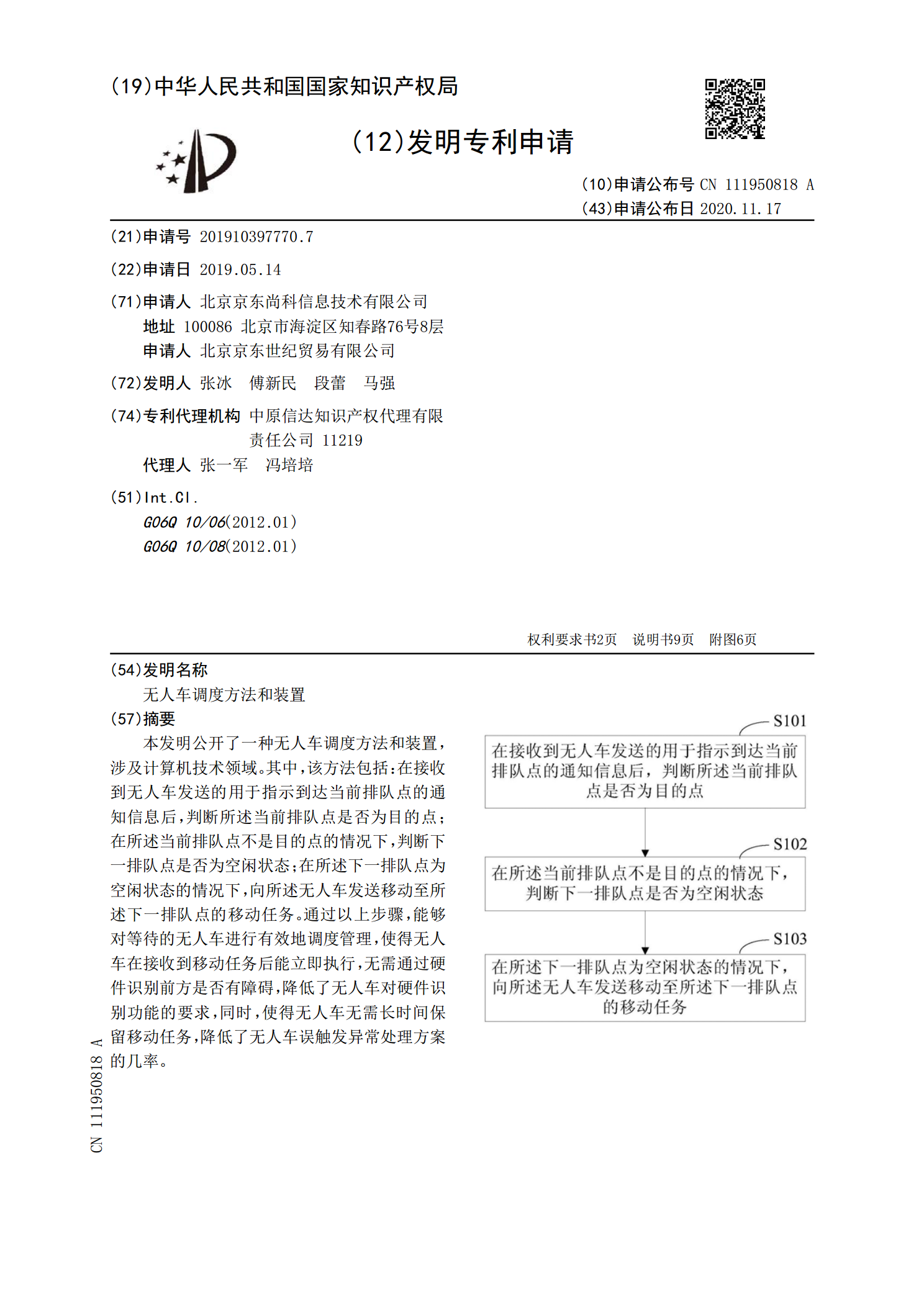
本发明公开了一种无人车调度方法和装置,涉及计算机技术领域。其中,该方法包括:在接收到无人车发送的用于指示到达当前排队点的通知信息后,判断所述当前排队点是否为目的点;在所述当前排队点不是目的点的情况下,判断下一排队点是否为空闲状态;在所述下一排队点为空闲状态的情况下,向所述无人车发送移动至所述下一排队点的移动任务。通过以上步骤,能够对等待的无人车进行有效地调度管理,使得无人车在接收到移动任务后能立即执行,无需通过硬件识别前方是否有障碍,降低了无人车对硬件识别功能的要求,同时,使得无人车无需长时间保留移动任务
无人车横向控制方法和装置.pdf
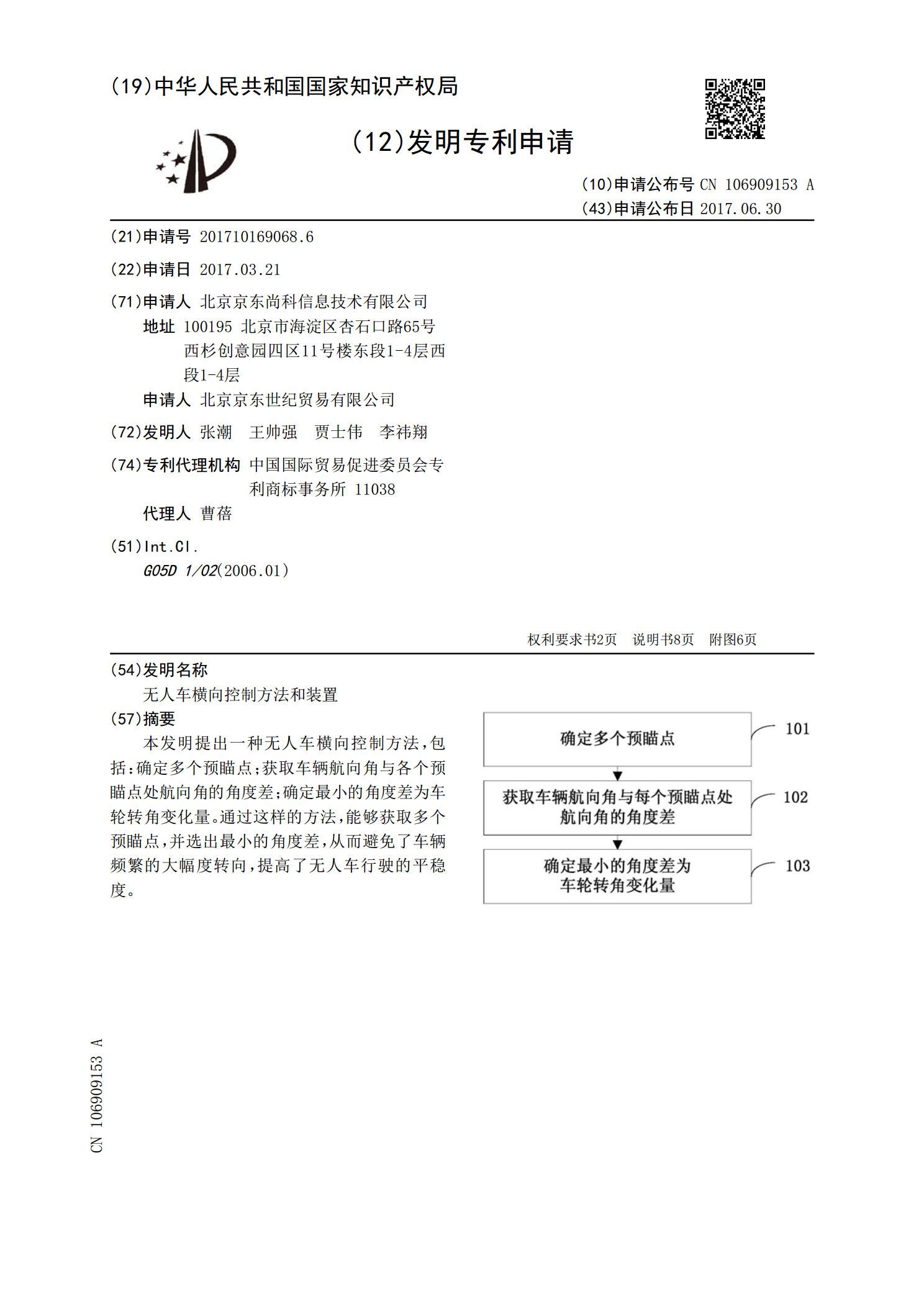
本发明提出一种无人车横向控制方法,包括:确定多个预瞄点;获取车辆航向角与各个预瞄点处航向角的角度差;确定最小的角度差为车轮转角变化量。通过这样的方法,能够获取多个预瞄点,并选出最小的角度差,从而避免了车辆频繁的大幅度转向,提高了无人车行驶的平稳度。
用于调度无人售卖车的方法、装置和无人售卖车.pdf
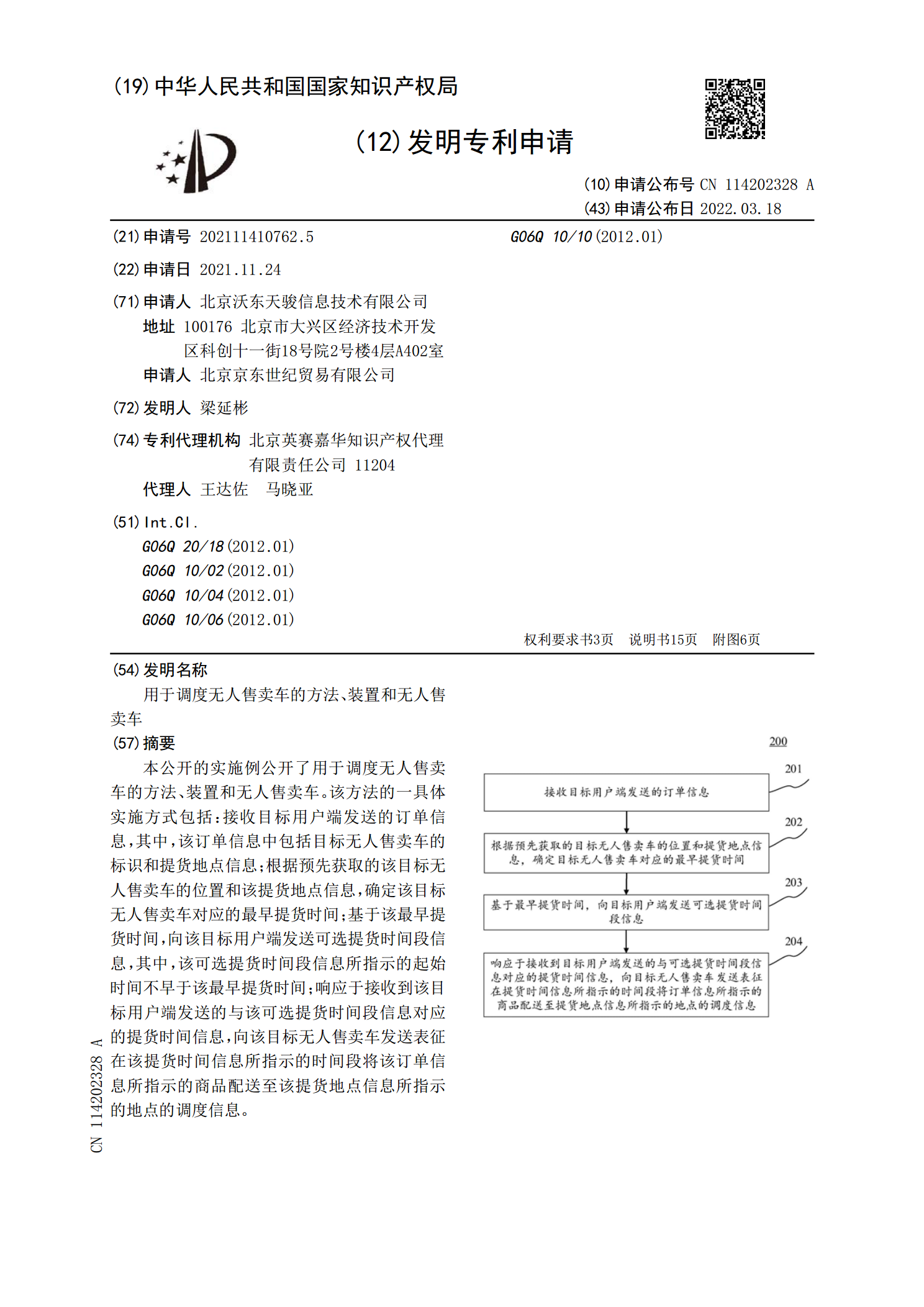
本公开的实施例公开了用于调度无人售卖车的方法、装置和无人售卖车。该方法的一具体实施方式包括:接收目标用户端发送的订单信息,其中,该订单信息中包括目标无人售卖车的标识和提货地点信息;根据预先获取的该目标无人售卖车的位置和该提货地点信息,确定该目标无人售卖车对应的最早提货时间;基于该最早提货时间,向该目标用户端发送可选提货时间段信息,其中,该可选提货时间段信息所指示的起始时间不早于该最早提货时间;响应于接收到该目标用户端发送的与该可选提货时间段信息对应的提货时间信息,向该目标无人售卖车发送表征在该提货时间信息
无人车路径跟踪及避障方法.pdf
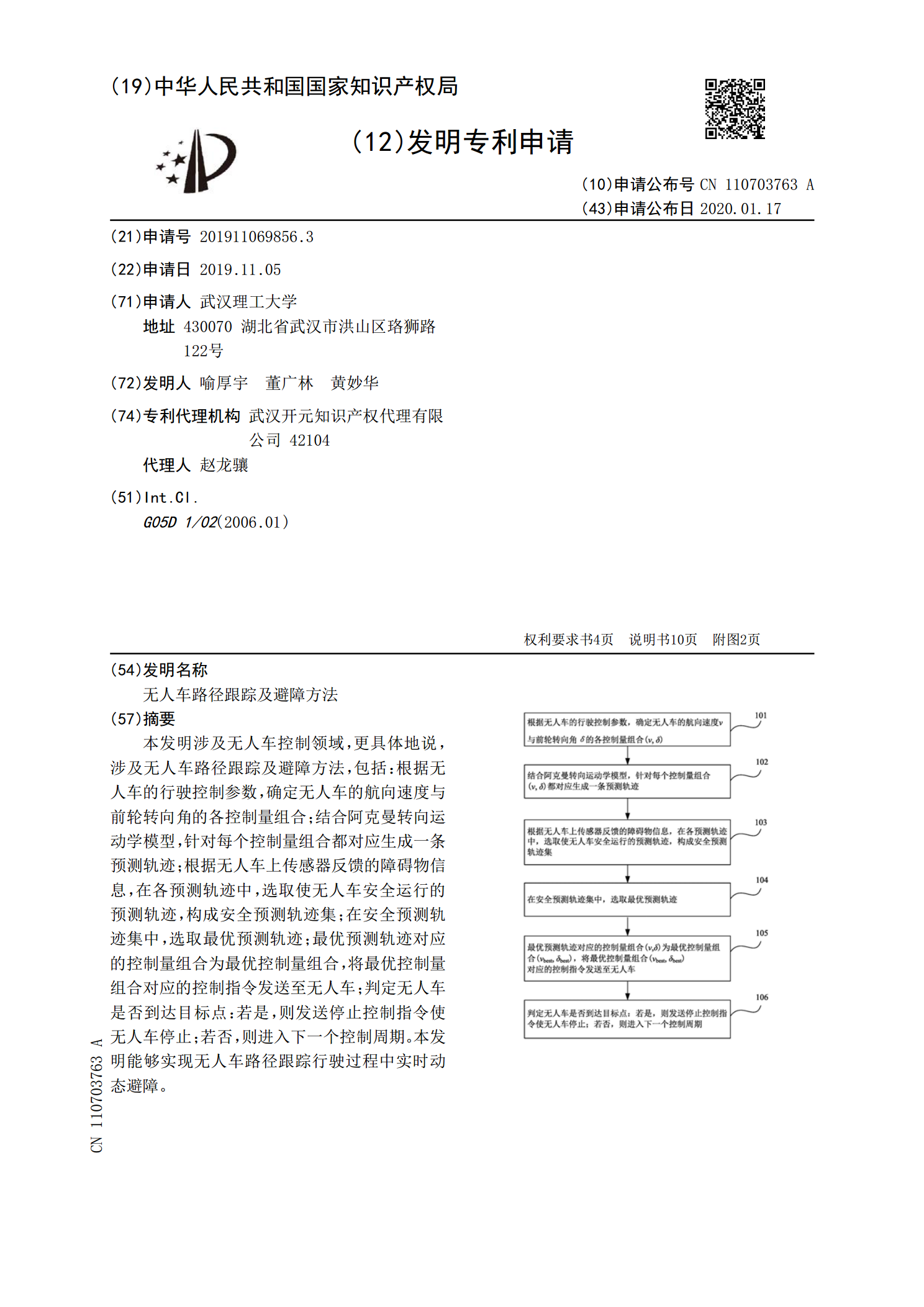
本发明涉及无人车控制领域,更具体地说,涉及无人车路径跟踪及避障方法,包括:根据无人车的行驶控制参数,确定无人车的航向速度与前轮转向角的各控制量组合;结合阿克曼转向运动学模型,针对每个控制量组合都对应生成一条预测轨迹;根据无人车上传感器反馈的障碍物信息,在各预测轨迹中,选取使无人车安全运行的预测轨迹,构成安全预测轨迹集;在安全预测轨迹集中,选取最优预测轨迹;最优预测轨迹对应的控制量组合为最优控制量组合,将最优控制量组合对应的控制指令发送至无人车;判定无人车是否到达目标点:若是,则发送停止控制指令使无人车停止