
无人车路径跟踪及避障方法.pdf

一条****丹淑


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人车路径跟踪及避障方法.pdf
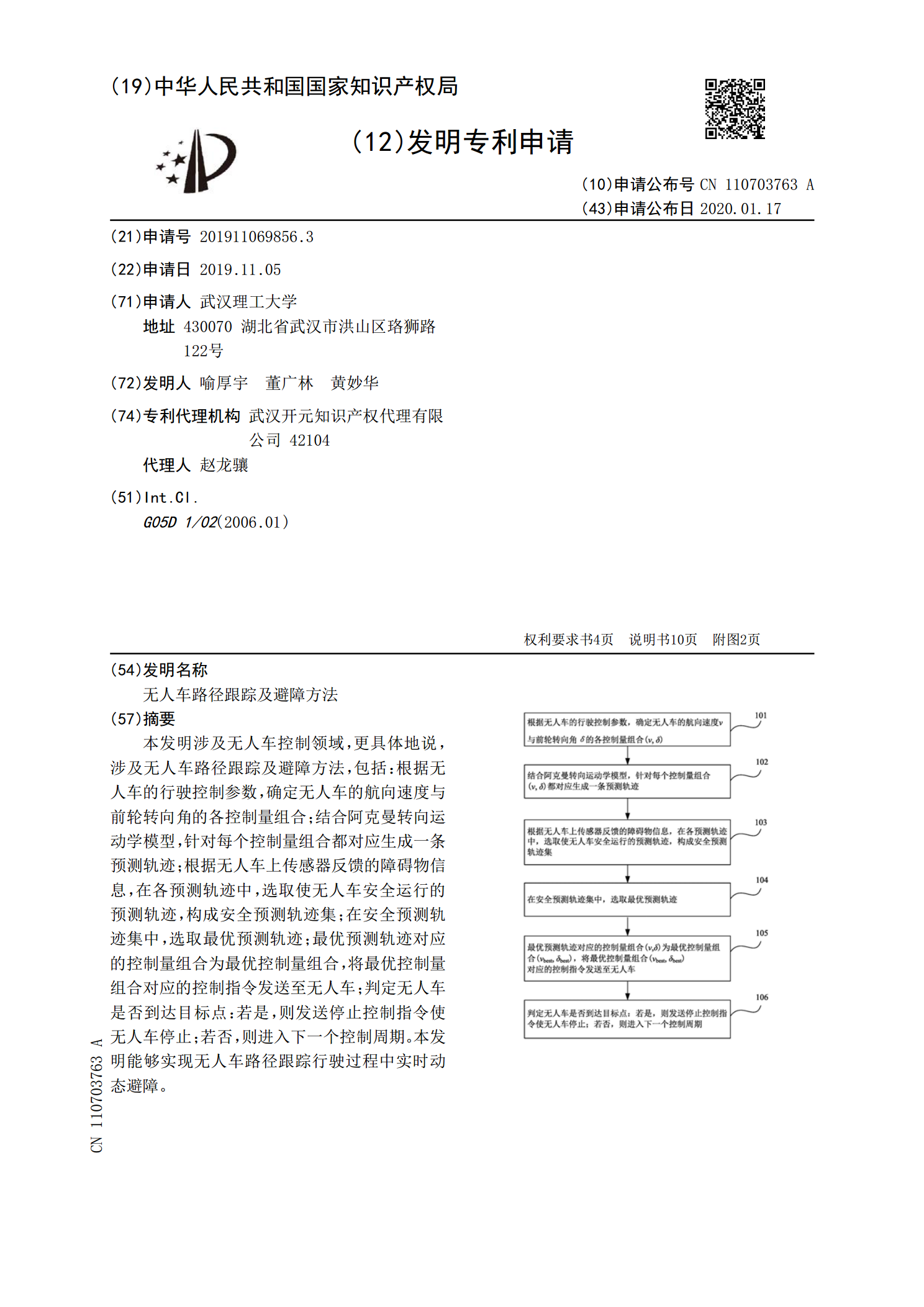
本发明涉及无人车控制领域,更具体地说,涉及无人车路径跟踪及避障方法,包括:根据无人车的行驶控制参数,确定无人车的航向速度与前轮转向角的各控制量组合;结合阿克曼转向运动学模型,针对每个控制量组合都对应生成一条预测轨迹;根据无人车上传感器反馈的障碍物信息,在各预测轨迹中,选取使无人车安全运行的预测轨迹,构成安全预测轨迹集;在安全预测轨迹集中,选取最优预测轨迹;最优预测轨迹对应的控制量组合为最优控制量组合,将最优控制量组合对应的控制指令发送至无人车;判定无人车是否到达目标点:若是,则发送停止控制指令使无人车停止

基于二次规划的无人车同时路径跟踪与避障方法.pdf
本发明公开了一种基于二次规划的无人车同时路径跟踪与避障方法,通过获取目标及障碍物在行驶过程中经过的多个离散点坐标,同时得到对应的离散时间点,通过曲线拟合方法分别拟合出目标行驶轨迹坐标与时间之间的关系以及障碍物行驶轨迹坐标与时间之间的关系,利用控制李雅普诺夫函数和控制障碍函数分别构建无人车本体运动模型的软约束和硬约束,利用软约束和硬约束构造二次规划,然后利用计算机编程,迭代求解得到无人车本体运动模型的实时控制输入量,从而达到跟踪目标轨迹的同时避障的目的。与现有技术相比,本发明不但跟踪范围大,准确度高,算法速

一种基于人工势场的无人车弯道避障路径规划方法.pdf
本发明涉及一种基于人工势场的无人车弯道避障路径规划方法,属于无人车驾驶技术领域。现有的人工势场法在规划无人车避障路径时,存在局部最优问题,本发明在构建人工合力势场的基础上,根据合力判断主车是否陷入局部最优,通过绕圆避障1的方式解决局部最优问题,通过绕圆避障2的方式解决规划出的下一轨迹点位于障碍物膨胀范围内的问题,并且在绕圆避障过程中,根据合力对主车速度进行调整,从而保障车辆安全。

基于模型预测控制的无人车轨迹跟踪与避障控制.docx
基于模型预测控制的无人车轨迹跟踪与避障控制基于模型预测控制的无人车轨迹跟踪与避障控制摘要:无人车作为自动驾驶技术的重要应用之一,其轨迹跟踪与避障控制是关键问题。本文提出了一种基于模型预测控制(MPC)的无人车轨迹跟踪与避障控制方法。首先,通过建立无人车运动模型,预测其在未来一段时间内的轨迹。然后,利用优化算法根据预测轨迹生成最优控制策略。最后,根据实时感知到的环境信息,调整控制策略以实现轨迹跟踪与避障。关键词:无人车,模型预测控制,轨迹跟踪,避障控制引言:随着自动驾驶技术的迅猛发展,无人车在各个领域的应用
无人机避障方法及系统、无人机集群避障方法及系统.pdf
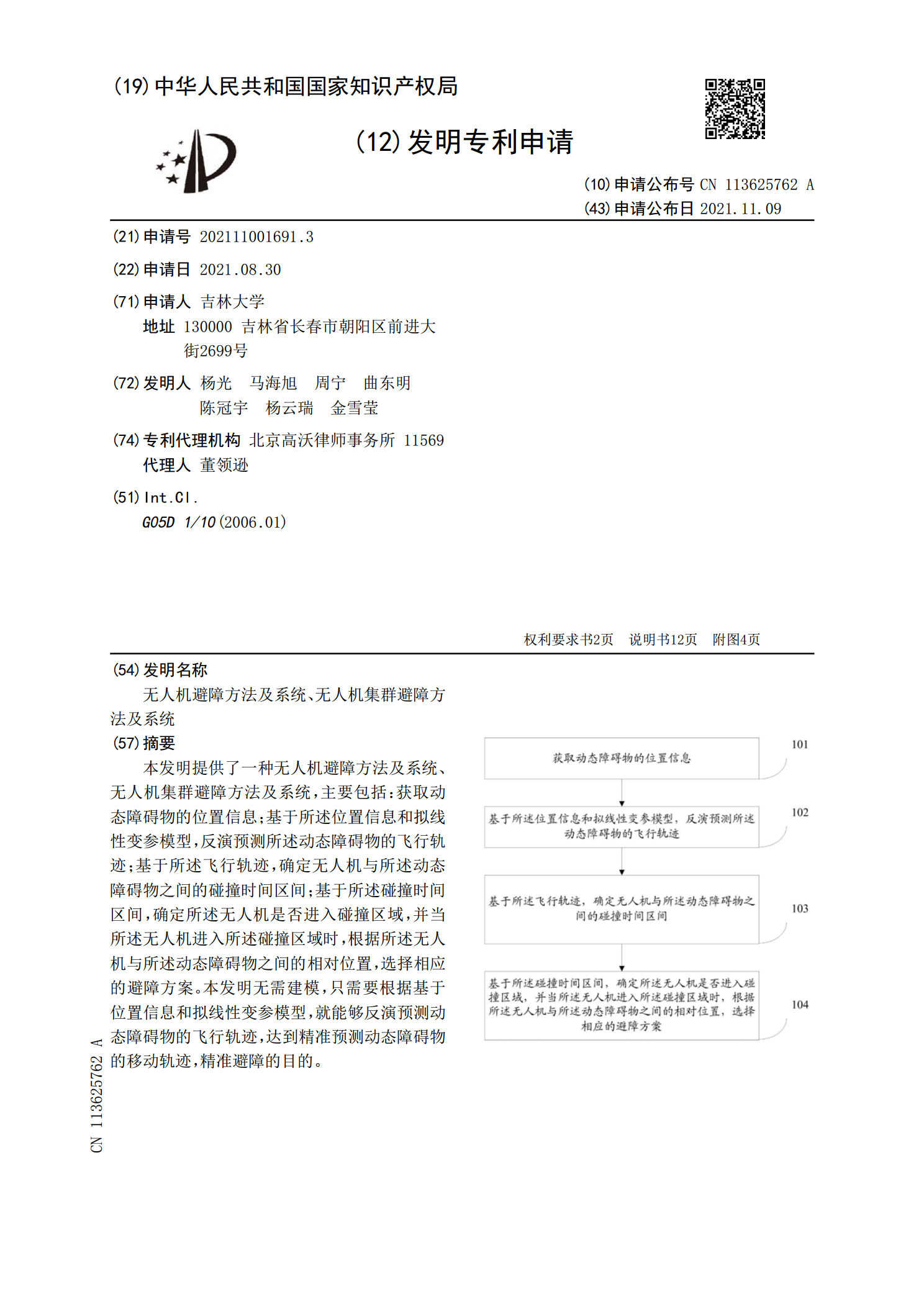
本发明提供了一种无人机避障方法及系统、无人机集群避障方法及系统,主要包括:获取动态障碍物的位置信息;基于所述位置信息和拟线性变参模型,反演预测所述动态障碍物的飞行轨迹;基于所述飞行轨迹,确定无人机与所述动态障碍物之间的碰撞时间区间;基于所述碰撞时间区间,确定所述无人机是否进入碰撞区域,并当所述无人机进入所述碰撞区域时,根据所述无人机与所述动态障碍物之间的相对位置,选择相应的避障方案。本发明无需建模,只需要根据基于位置信息和拟线性变参模型,就能够反演预测动态障碍物的飞行轨迹,达到精准预测动态障碍物的移动轨迹