
车辆行驶控制设备和车辆行驶控制方法.pdf

一条****彩妍

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆行驶控制设备和车辆行驶控制方法.pdf
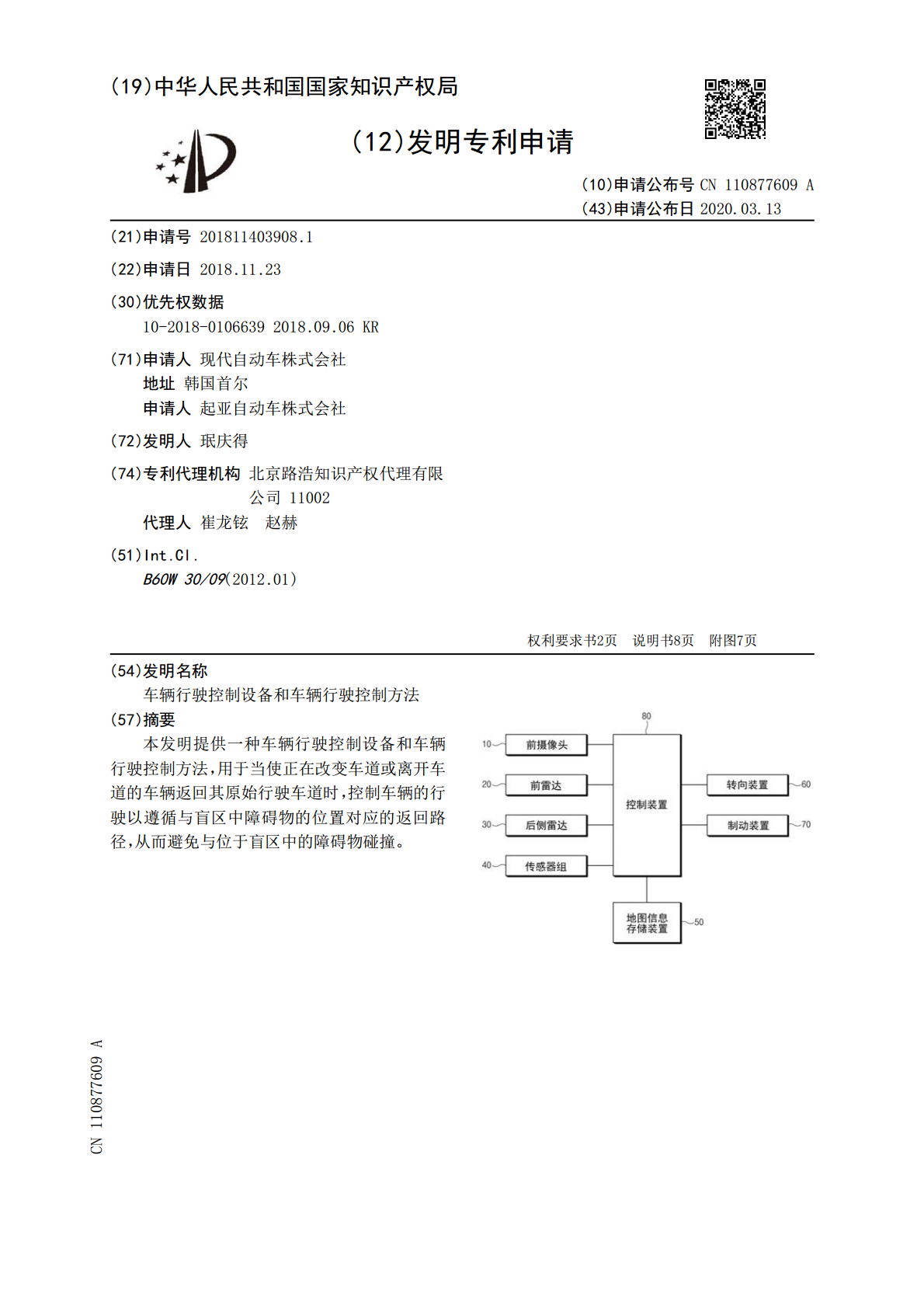
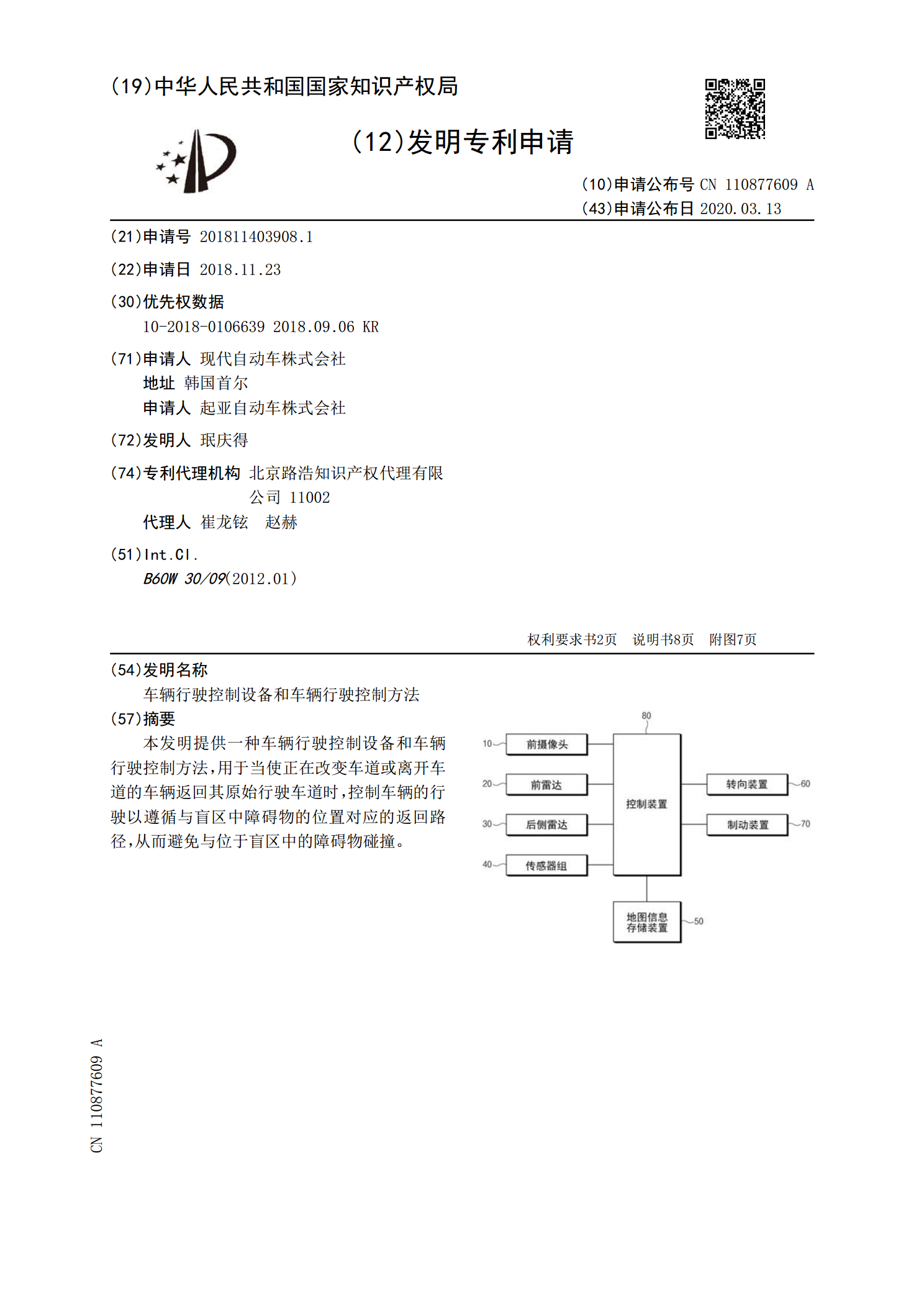
本发明提供一种车辆行驶控制设备和车辆行驶控制方法,用于当使正在改变车道或离开车道的车辆返回其原始行驶车道时,控制车辆的行驶以遵循与盲区中障碍物的位置对应的返回路径,从而避免与位于盲区中的障碍物碰撞。
车辆行驶控制方法及车辆行驶控制装置.pdf
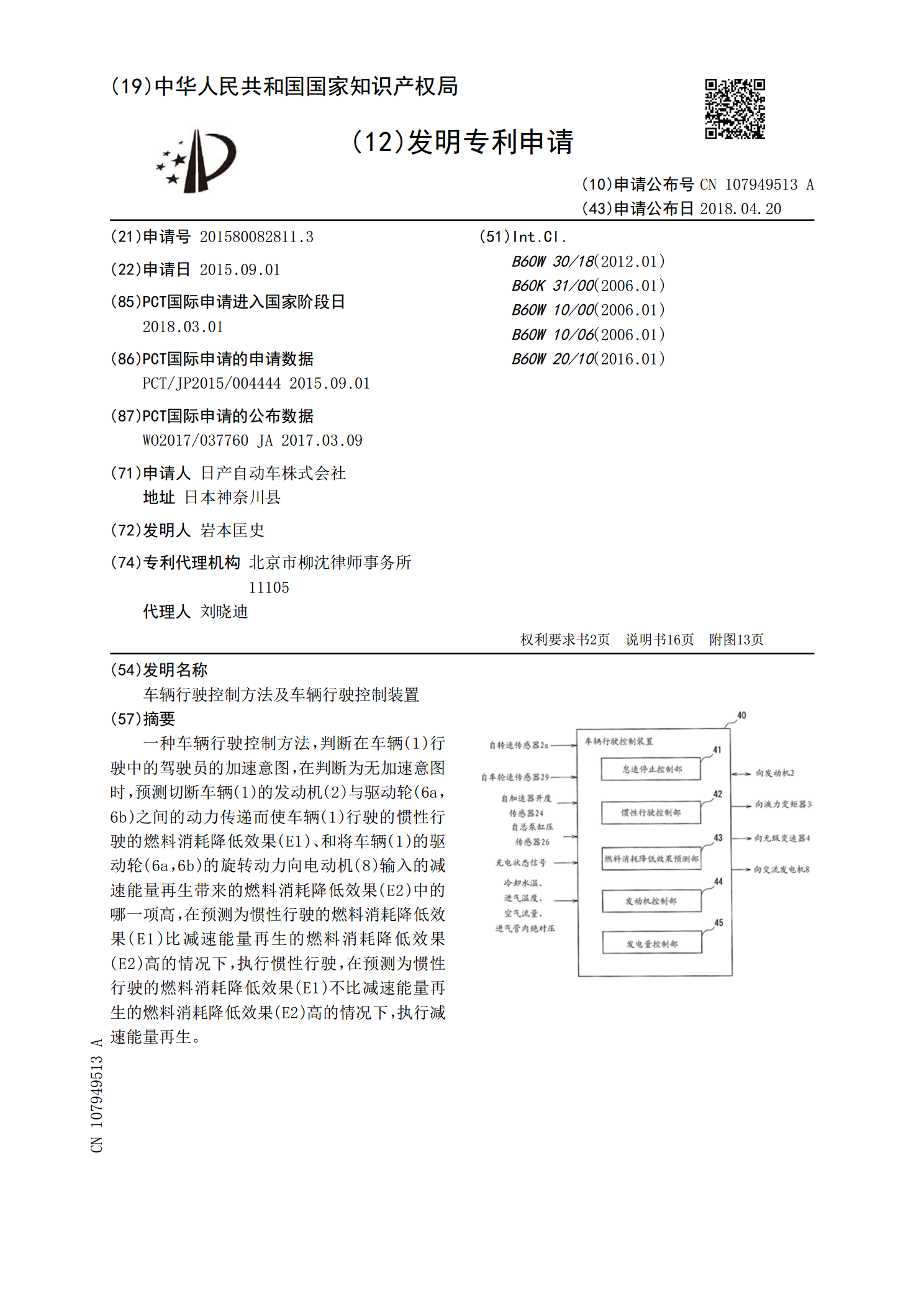
一种车辆行驶控制方法,判断在车辆(1)行驶中的驾驶员的加速意图,在判断为无加速意图时,预测切断车辆(1)的发动机(2)与驱动轮(6a,6b)之间的动力传递而使车辆(1)行驶的惯性行驶的燃料消耗降低效果(E1)、和将车辆(1)的驱动轮(6a,6b)的旋转动力向电动机(8)输入的减速能量再生带来的燃料消耗降低效果(E2)中的哪一项高,在预测为惯性行驶的燃料消耗降低效果(E1)比减速能量再生的燃料消耗降低效果(E2)高的情况下,执行惯性行驶,在预测为惯性行驶的燃料消耗降低效果(E1)不比减速能量再生的燃料消耗降
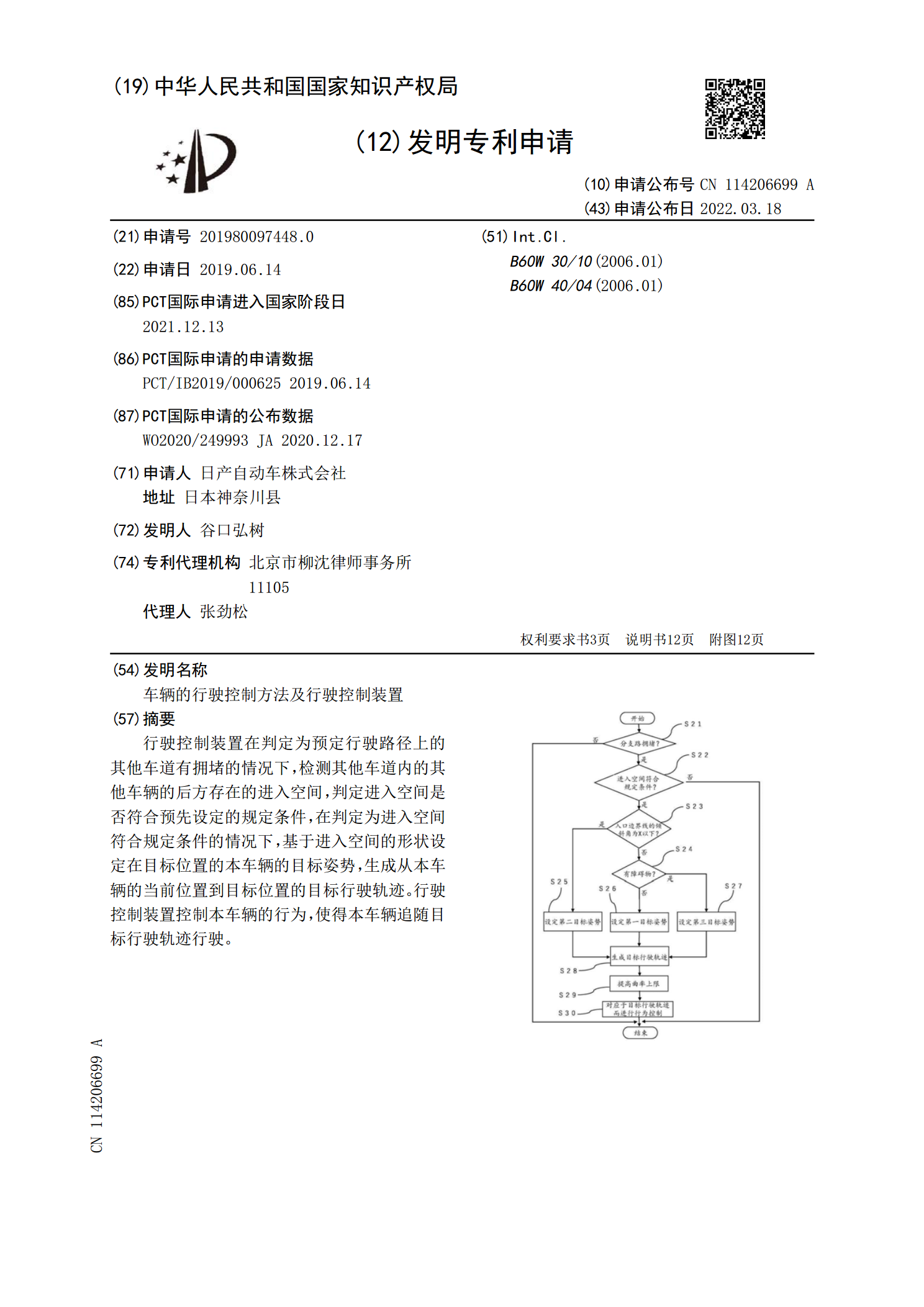
车辆的行驶控制方法及行驶控制装置.pdf
行驶控制装置在判定为预定行驶路径上的其他车道有拥堵的情况下,检测其他车道内的其他车辆的后方存在的进入空间,判定进入空间是否符合预先设定的规定条件,在判定为进入空间符合规定条件的情况下,基于进入空间的形状设定在目标位置的本车辆的目标姿势,生成从本车辆的当前位置到目标位置的目标行驶轨迹。行驶控制装置控制本车辆的行为,使得本车辆追随目标行驶轨迹行驶。

车辆用行驶控制装置、车辆用行驶控制方法.pdf
抑制因中立位置偏移导致的稳定性控制的错误动作。在通过驾驶员的转向操作来使转向轴(12)旋转的转轮输入机构(St
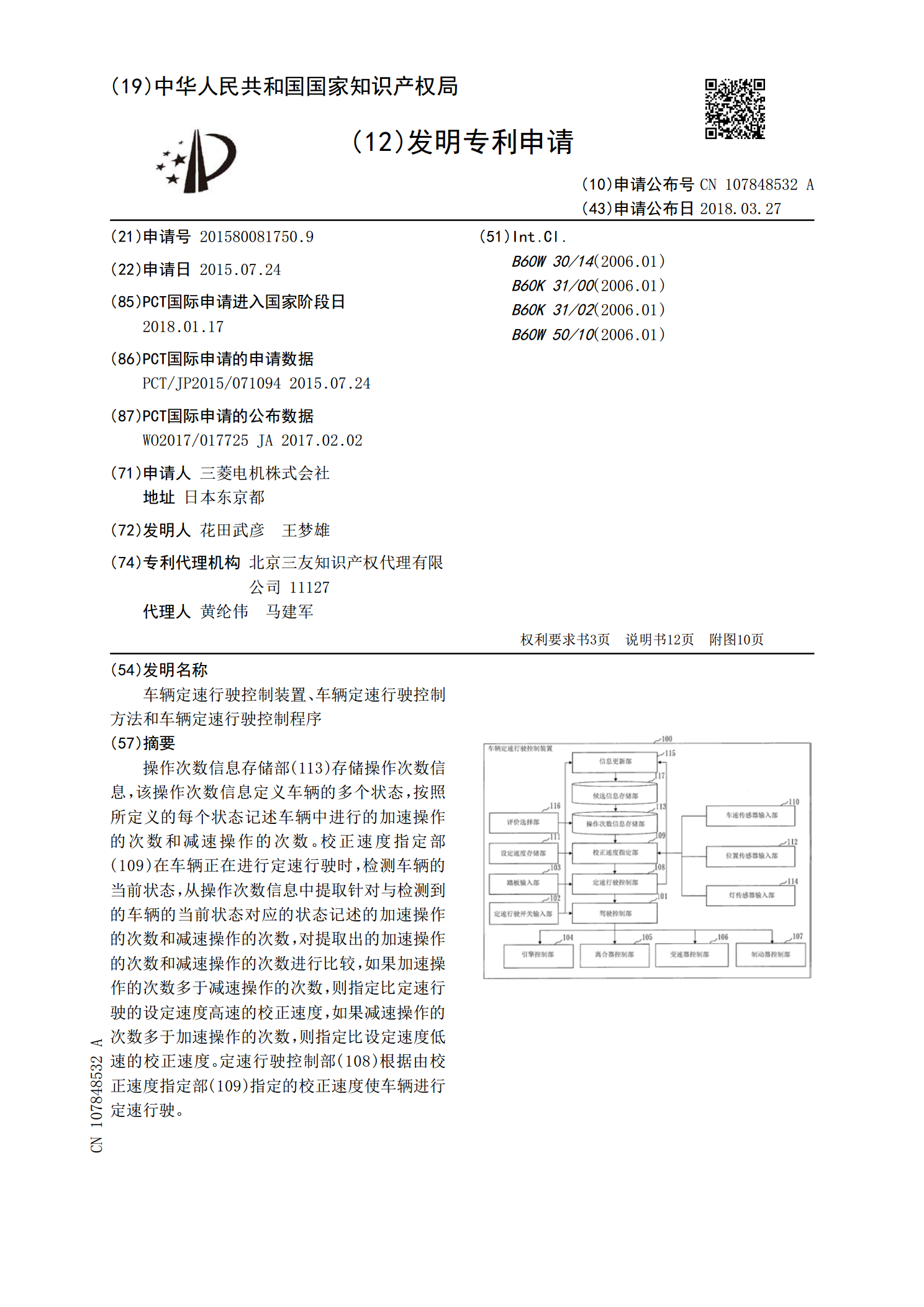
车辆定速行驶控制装置、车辆定速行驶控制方法和车辆定速行驶控制程序.pdf
操作次数信息存储部(113)存储操作次数信息,该操作次数信息定义车辆的多个状态,按照所定义的每个状态记述车辆中进行的加速操作的次数和减速操作的次数。校正速度指定部(109)在车辆正在进行定速行驶时,检测车辆的当前状态,从操作次数信息中提取针对与检测到的车辆的当前状态对应的状态记述的加速操作的次数和减速操作的次数,对提取出的加速操作的次数和减速操作的次数进行比较,如果加速操作的次数多于减速操作的次数,则指定比定速行驶的设定速度高速的校正速度,如果减速操作的次数多于加速操作的次数,则指定比设定速度低速的校正速