
获取采集盲区的方法和装置.pdf

如灵****姐姐


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

获取采集盲区的方法和装置.pdf
本发明实施例提出一种获取采集盲区的方法和装置,方法包括:获取车辆上各传感器的位置参数和探测范围参数;获取车辆的外形参数;根据车辆的外形参数,以及每个传感器的位置参数和探测范围参数,获取每个传感器的采集区域;将各传感器的采集区域结合,得到车辆的采集盲区;基于采集盲区的边界范围,获取采集盲区的空间数据。本发明实施例根据各传感器的位置参数、探测范围参数以及车辆的外形参数,能够准确的获取车辆的采集盲区的空间数据。
获取盲区噪音方法和装置.pdf
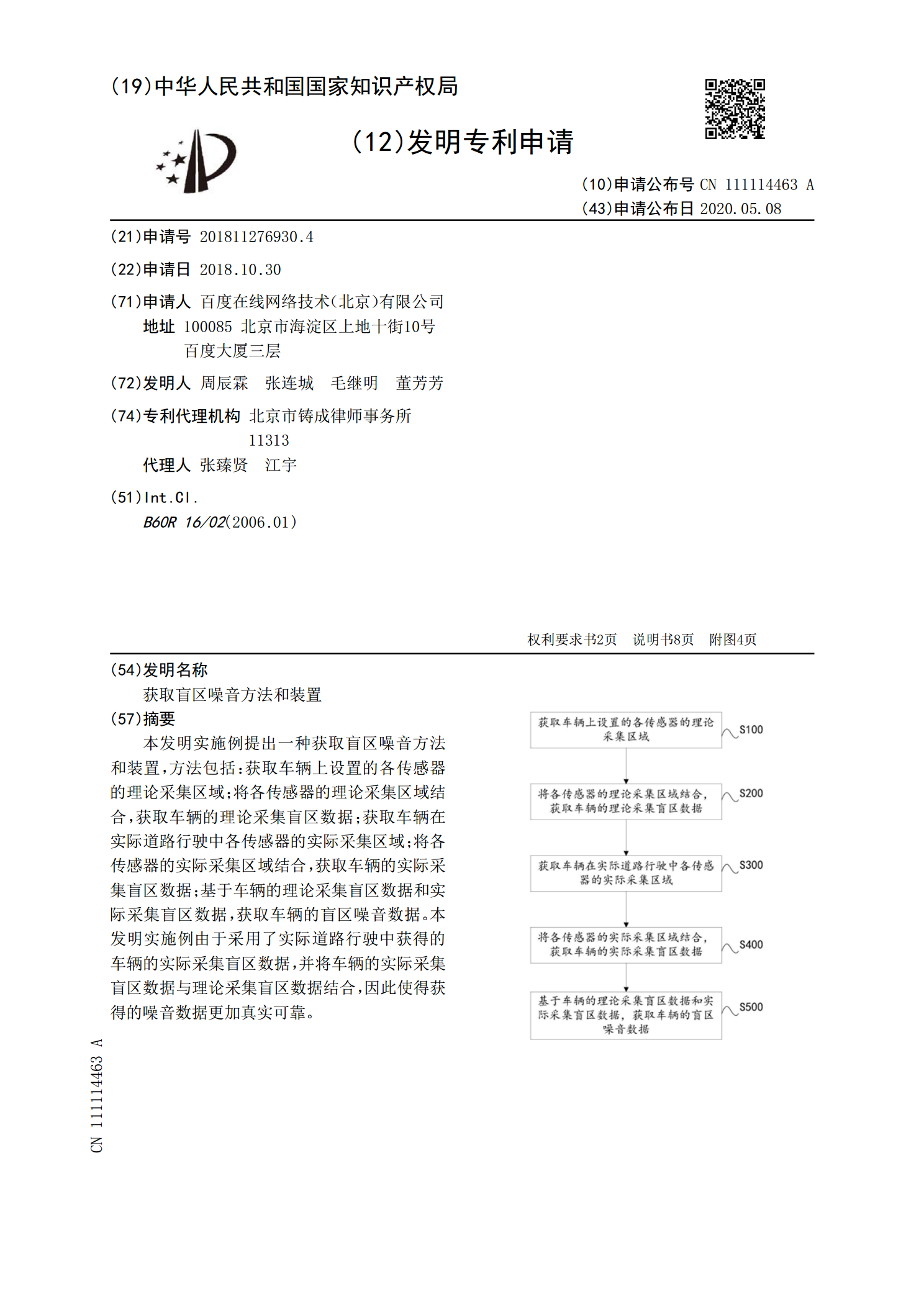
本发明实施例提出一种获取盲区噪音方法和装置,方法包括:获取车辆上设置的各传感器的理论采集区域;将各传感器的理论采集区域结合,获取车辆的理论采集盲区数据;获取车辆在实际道路行驶中各传感器的实际采集区域;将各传感器的实际采集区域结合,获取车辆的实际采集盲区数据;基于车辆的理论采集盲区数据和实际采集盲区数据,获取车辆的盲区噪音数据。本发明实施例由于采用了实际道路行驶中获得的车辆的实际采集盲区数据,并将车辆的实际采集盲区数据与理论采集盲区数据结合,因此使得获得的噪音数据更加真实可靠。
车辆盲区信息的采集方法及装置.pdf
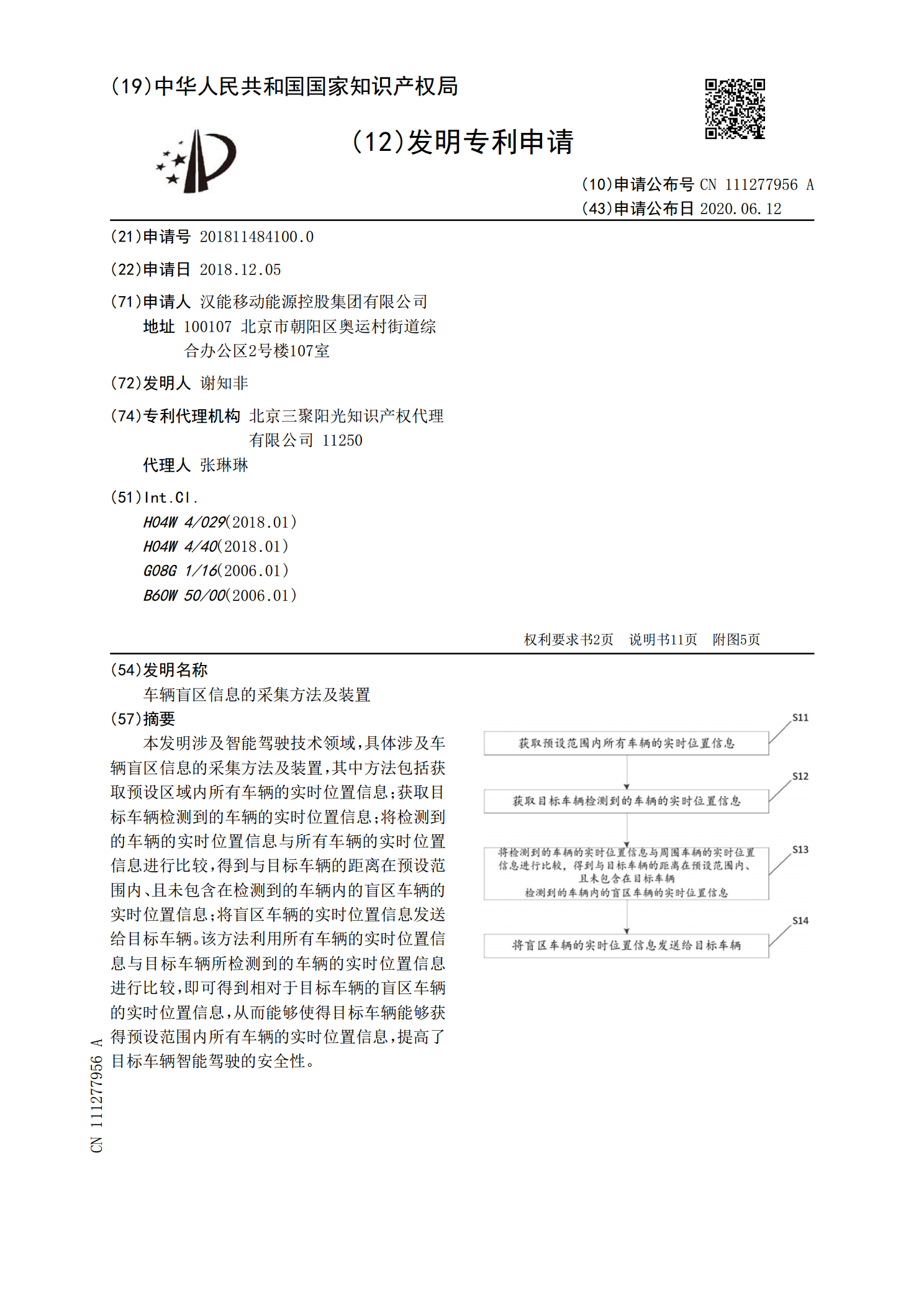
本发明涉及智能驾驶技术领域,具体涉及车辆盲区信息的采集方法及装置,其中方法包括获取预设区域内所有车辆的实时位置信息;获取目标车辆检测到的车辆的实时位置信息;将检测到的车辆的实时位置信息与所有车辆的实时位置信息进行比较,得到与目标车辆的距离在预设范围内、且未包含在检测到的车辆内的盲区车辆的实时位置信息;将盲区车辆的实时位置信息发送给目标车辆。该方法利用所有车辆的实时位置信息与目标车辆所检测到的车辆的实时位置信息进行比较,即可得到相对于目标车辆的盲区车辆的实时位置信息,从而能够使得目标车辆能够获得预设范围内所
消除A柱盲区装置和消除A柱盲区装置的控制方法.pdf
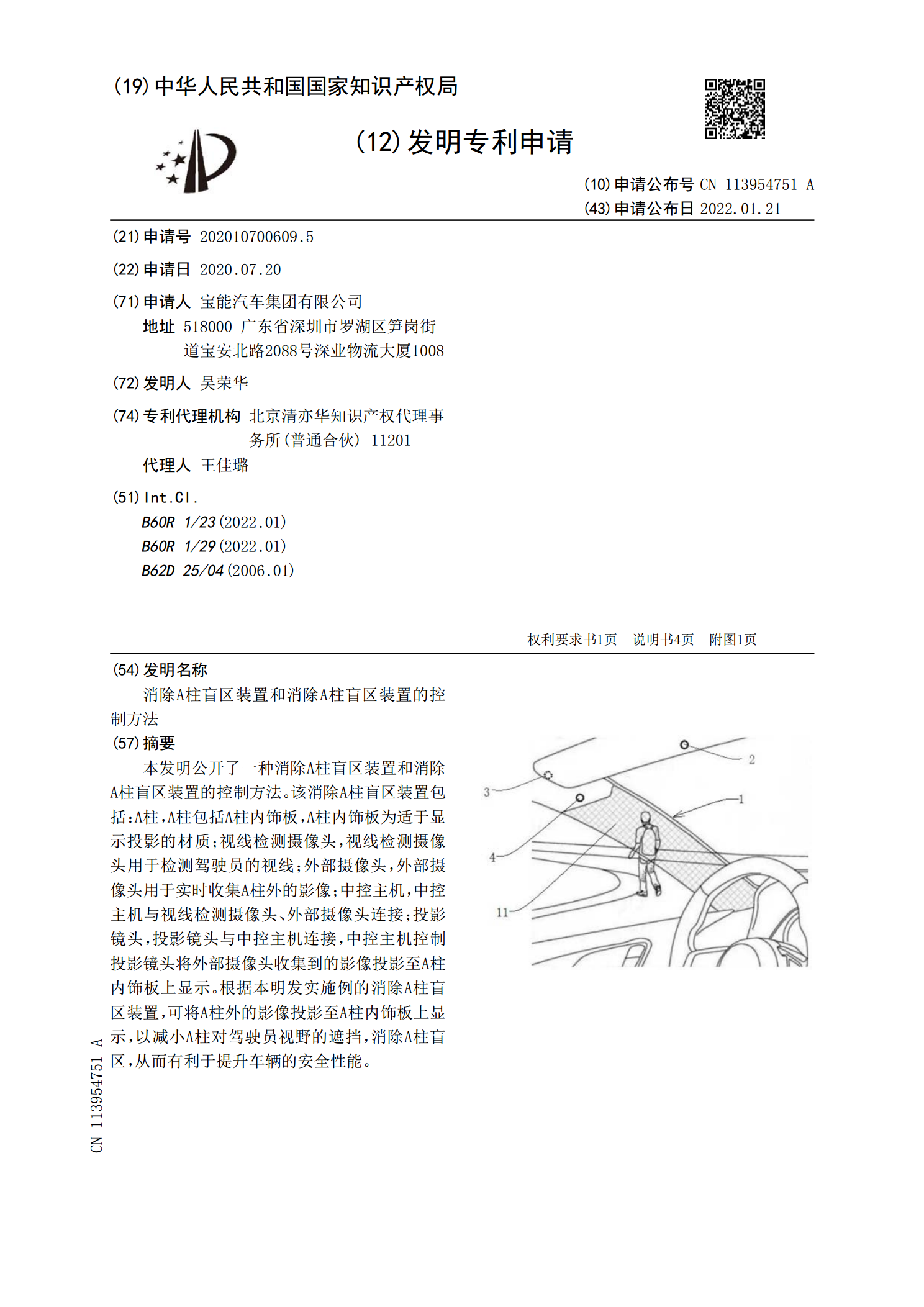
本发明公开了一种消除A柱盲区装置和消除A柱盲区装置的控制方法。该消除A柱盲区装置包括:A柱,A柱包括A柱内饰板,A柱内饰板为适于显示投影的材质;视线检测摄像头,视线检测摄像头用于检测驾驶员的视线;外部摄像头,外部摄像头用于实时收集A柱外的影像;中控主机,中控主机与视线检测摄像头、外部摄像头连接;投影镜头,投影镜头与中控主机连接,中控主机控制投影镜头将外部摄像头收集到的影像投影至A柱内饰板上显示。根据本明发实施例的消除A柱盲区装置,可将A柱外的影像投影至A柱内饰板上显示,以减小A柱对驾驶员视野的遮挡,消除A

一种盲区图像获取方法及相关终端装置.pdf
本申请实施例公开了一种盲区图像获取方法及相关终端装置。其中,一种盲区图像获取方法,包括:确定当前帧行驶图像与多帧历史行驶图像之间的位姿关系;确定障碍物与目标终端之间的目标距离;若所述目标距离小于或等于预设距离阈值,根据所述位姿关系和所述当前帧行驶图像对应盲区区域的盲区位置信息,从所述多帧历史行驶图像中获取所述盲区区域的填充像素点;基于所述多个目标点对应的填充像素点输出所述盲区图像。实施本申请实施例,可以获得终端底部的盲区区域的图像。