
一种盲区图像获取方法及相关终端装置.pdf

是你****岺呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共50页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种盲区图像获取方法及相关终端装置.pdf
本申请实施例公开了一种盲区图像获取方法及相关终端装置。其中,一种盲区图像获取方法,包括:确定当前帧行驶图像与多帧历史行驶图像之间的位姿关系;确定障碍物与目标终端之间的目标距离;若所述目标距离小于或等于预设距离阈值,根据所述位姿关系和所述当前帧行驶图像对应盲区区域的盲区位置信息,从所述多帧历史行驶图像中获取所述盲区区域的填充像素点;基于所述多个目标点对应的填充像素点输出所述盲区图像。实施本申请实施例,可以获得终端底部的盲区区域的图像。

一种证件图像的获取方法以及相关装置.pdf
本申请实施例提供了一种证件图像的获取方法以及相关装置,网页客户端获取服务端发送的引导信息,并将指示信息按照显示规则显示在预览画布中,响应于拍摄指令,获取证件照片,在预览画布上显示签字区域,并获取签字信息,在证件照片添加水印,得到证件图像,由于指示信息用于引导拍摄预设的证件要素,且证件照片为包括证件要素的图像,因此,本方法通过获取并按照显示规则显示指示信息,有利于提高证件照片的图像质量,又由于,签字信息通过在签字区域内的书写操作得到,且水印基于签字信息得到,显然,水印具有实时性和即时性,因此,添加水印后得到
一种待检测图像获取方法及待检测图像获取系统.pdf
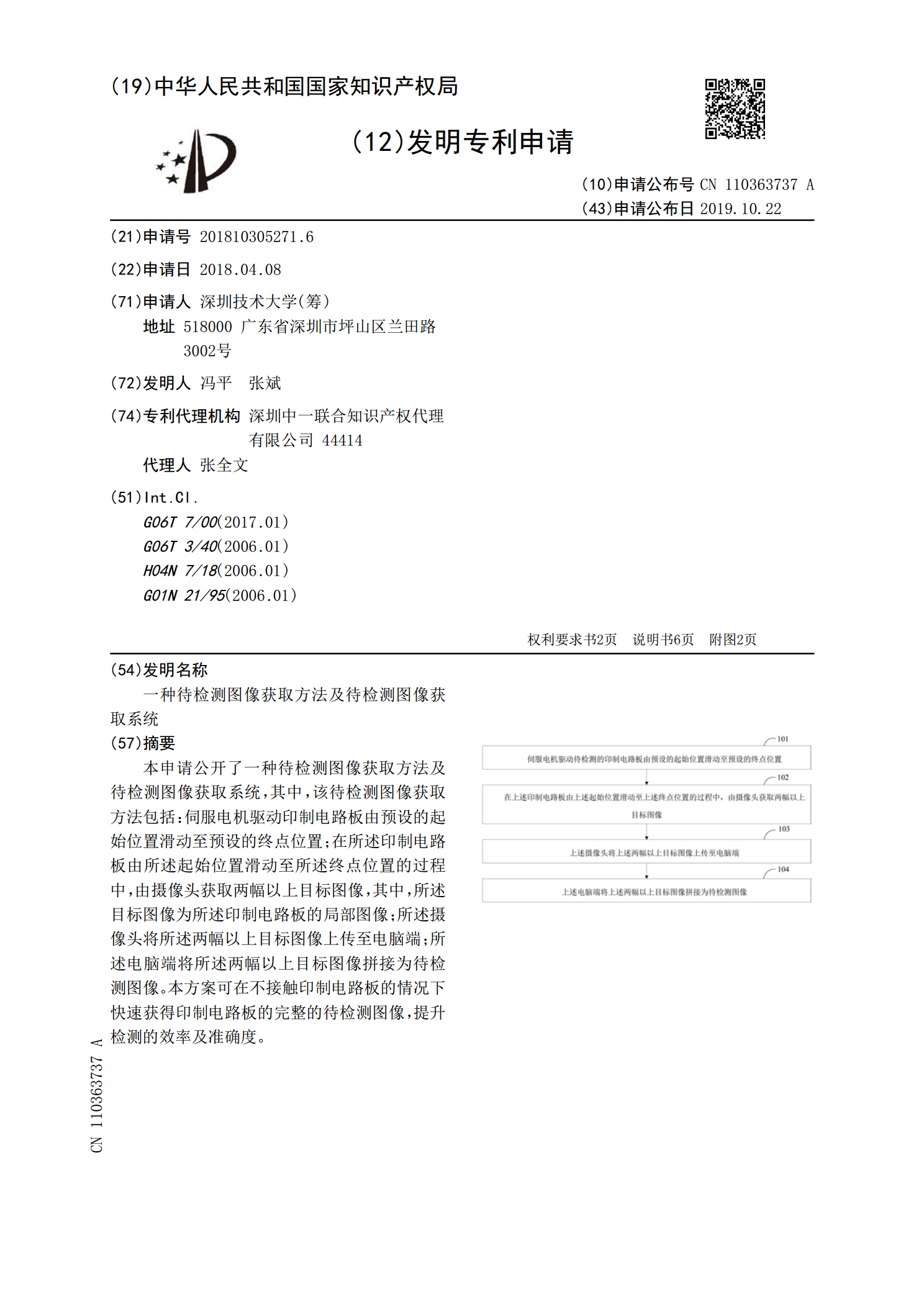
本申请公开了一种待检测图像获取方法及待检测图像获取系统,其中,该待检测图像获取方法包括:伺服电机驱动印制电路板由预设的起始位置滑动至预设的终点位置;在所述印制电路板由所述起始位置滑动至所述终点位置的过程中,由摄像头获取两幅以上目标图像,其中,所述目标图像为所述印制电路板的局部图像;所述摄像头将所述两幅以上目标图像上传至电脑端;所述电脑端将所述两幅以上目标图像拼接为待检测图像。本方案可在不接触印制电路板的情况下快速获得印制电路板的完整的待检测图像,提升检测的效率及准确度。

一种图像获取方法及设备.pdf
本申请公开了一种图像获取方法及设备,所述设备包括:第一容纳件和第二容纳件,所述第一容纳件与所述第二容纳件接合并且通过与所述第二容纳件的接合来形成容纳空间;摄像器件,位于所述第一容纳件和第二容纳件之间的容纳空间内,所述摄像器件包括:第一摄像头套件、第二摄像头套件和基板;所述第一摄像头套件固定在所述基板上并通过所述第一容纳件上的通孔进行第一方向的拍摄;以及所述第二摄像头套件固定在所述基板上并通过所述第二容纳件上的通孔进行第二方向的拍摄,其中所述第一方向与所述第二方向不同;通过使用所述第一摄像头套件和第二摄像头

一种盲区画面获取的方法以及终端设备.pdf
本申请提供一种盲区画面获取的方法以及终端设备,用于通过对驾驶员头部特征的采集,确定驾驶员在驾驶室内的盲区,并显示盲区画面,以减小驾驶盲区,提高驾驶安全性。该方法包括:获取驾驶员关键点特征数据;根据所述驾驶员关键点特征数据确定与车辆的预设部位对应的盲区视野范围;根据所述盲区视野范围获取对应的盲区画面;显示所述盲区画面。