
车辆驾驶方法和装置.pdf

梦影****主a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆驾驶方法和装置.pdf
本申请的实施例提供了一种车辆驾驶方法和装置。本申请实施例中的车辆驾驶方法包括:获取第一道路上的第一车辆的当前运动参数和当前位置信息、第二道路上的第二车辆的当前运动参数和当前地理位置信息以及存在驾驶视野盲区的目标道路交汇口的地理位置信息,其中,所述第一道路以及所述第二道路为交汇于所述目标道路交汇口的两条道路;根据所述第一车辆的当前运动参数、所述第一车辆的当前地理位置信息、所述第二车辆的当前运动参数、所述第二车辆的当前地理位置信息以及所述目标道路交汇口的地理位置信息。本申请实施例的技术方案提高了所确定的用于进
车辆驾驶提示方法、车辆驾驶提示装置和终端.pdf
本发明提出了一种车辆驾驶提示方法、一种车辆驾驶提示装置和一种终端,其中,车辆驾驶提示方法包括:接收来自车联网服务器的相邻车辆的驾驶信息,其中,所述相邻车辆与目标车辆的距离小于或等于预定距离;根据所述相邻车辆的驾驶信息,为所述目标车辆发出对应的驾驶安全提示。通过本发明的技术方案,使目标车辆的驾驶员及时获知相邻车辆的驾驶信息及可能的安全隐患,并得到对应的驾驶安全提示,避免与相邻车辆发生安全事故,增强目标车辆的驾驶安全性,提升了驾驶员的人身安全。
驾驶辅助装置、车辆控制装置、驾驶辅助系统和驾驶辅助方法.pdf
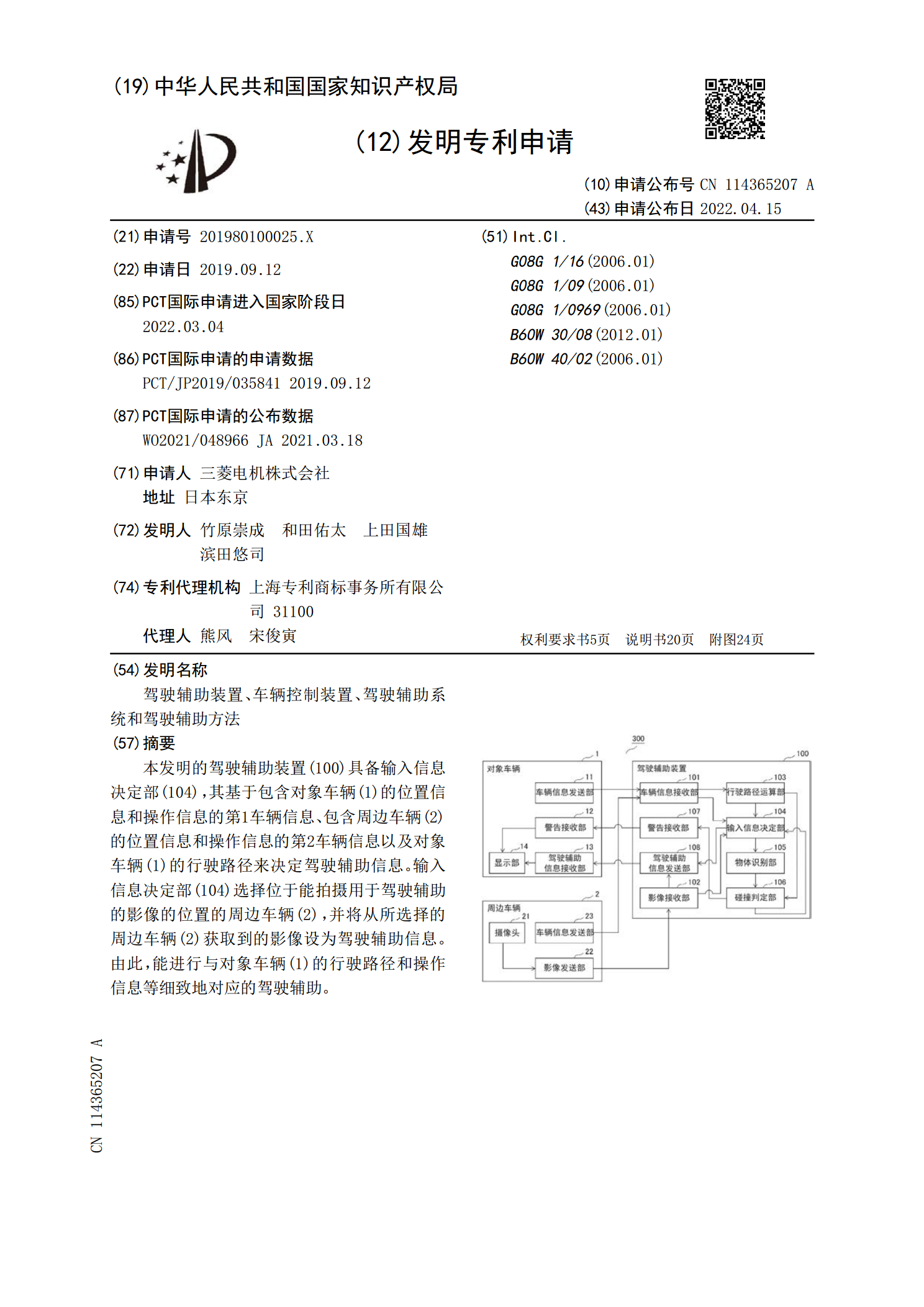
本发明的驾驶辅助装置(100)具备输入信息决定部(104),其基于包含对象车辆(1)的位置信息和操作信息的第1车辆信息、包含周边车辆(2)的位置信息和操作信息的第2车辆信息以及对象车辆(1)的行驶路径来决定驾驶辅助信息。输入信息决定部(104)选择位于能拍摄用于驾驶辅助的影像的位置的周边车辆(2),并将从所选择的周边车辆(2)获取到的影像设为驾驶辅助信息。由此,能进行与对象车辆(1)的行驶路径和操作信息等细致地对应的驾驶辅助。
车辆检测方法、装置和自动驾驶车辆.pdf
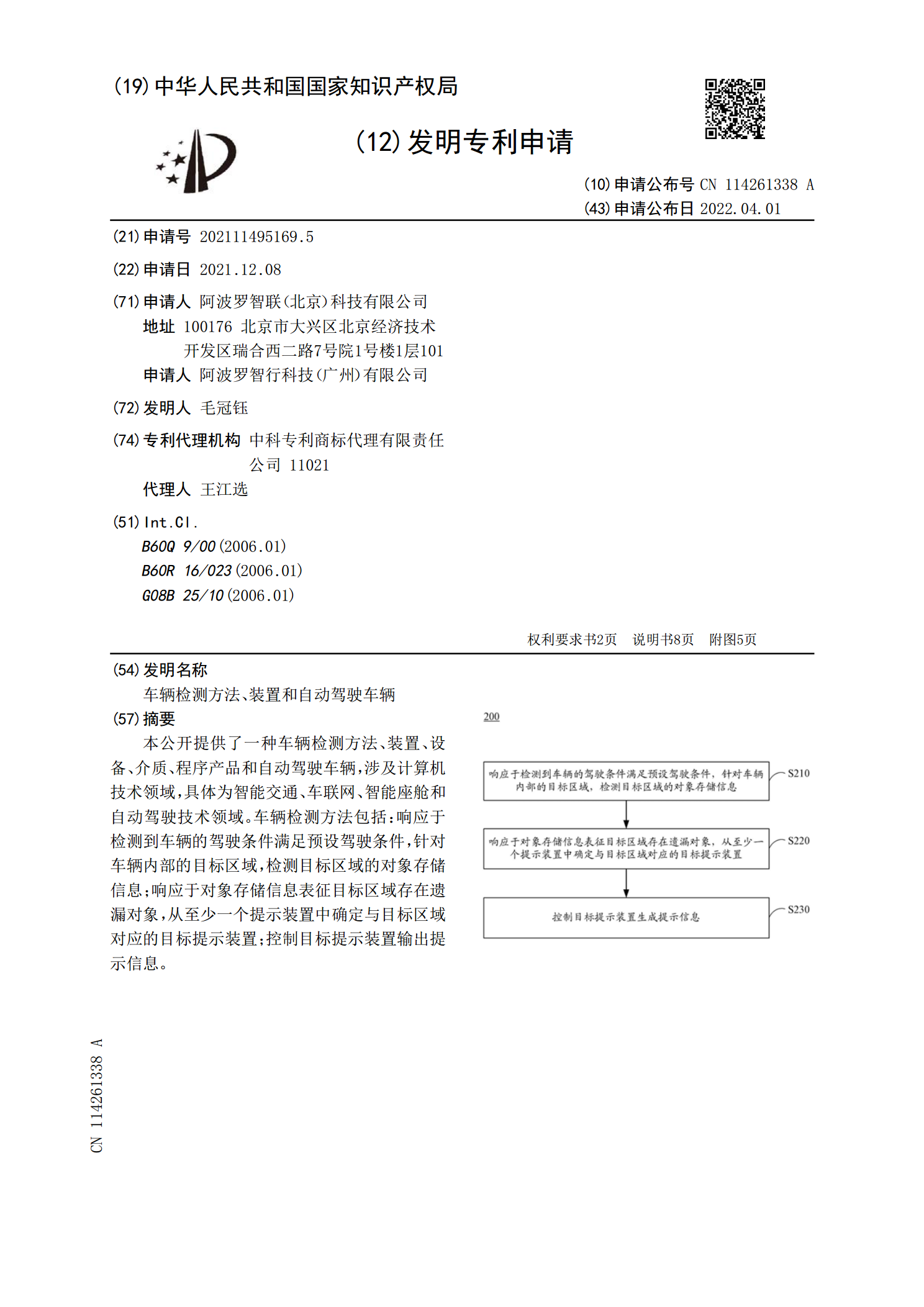
本公开提供了一种车辆检测方法、装置、设备、介质、程序产品和自动驾驶车辆,涉及计算机技术领域,具体为智能交通、车联网、智能座舱和自动驾驶技术领域。车辆检测方法包括:响应于检测到车辆的驾驶条件满足预设驾驶条件,针对车辆内部的目标区域,检测目标区域的对象存储信息;响应于对象存储信息表征目标区域存在遗漏对象,从至少一个提示装置中确定与目标区域对应的目标提示装置;控制目标提示装置输出提示信息。

车辆及车辆的驾驶方法、装置.pdf
本发明公开了一种车辆及车辆的驾驶方法、装置,其中,方法包括:识别车辆存在行驶风险,则获取驾驶员第一位置信息和第一状态信息;根据第一位置信息和第一状态信息发出针对驾驶员的第一接管提醒;对车辆的接管操作进行监测;若未监测接管操作,检测并识别车辆存在乘客,发出针对乘客的第二接管提醒。根据本发明实施例的车辆的驾驶方法,无论驾驶员是否停留在驾驶座椅,都能够及时有效的进行提醒;并且通过车内乘客度驾驶员进行间接提醒,从而有效提升自动驾驶人机模式切换时对驾驶员的提醒能力,进一步保证智能出行的安全性和顺畅性,满足自动驾驶的