
协同感知方法和装置.pdf

邻家****ng


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

协同感知方法和装置.pdf
本申请公开了一种协同感知方法和装置。该方法包括接收停车场内每个感知终端感知的障碍物信息;对接收的全部所述障碍物信息进行融合,形成全场障碍物感知信息;根据指定车辆的当前位置在全场障碍物感知信息中搜索指定车辆周围的障碍物信息;当搜索到所述指定车辆周围存在障碍物时,将搜索结果向所述指定车辆广播。本申请解决了相关技术中自动驾驶车辆在停车场内盲区感知能力差的技术问题。
道路环境协同感知决策方法及装置.pdf
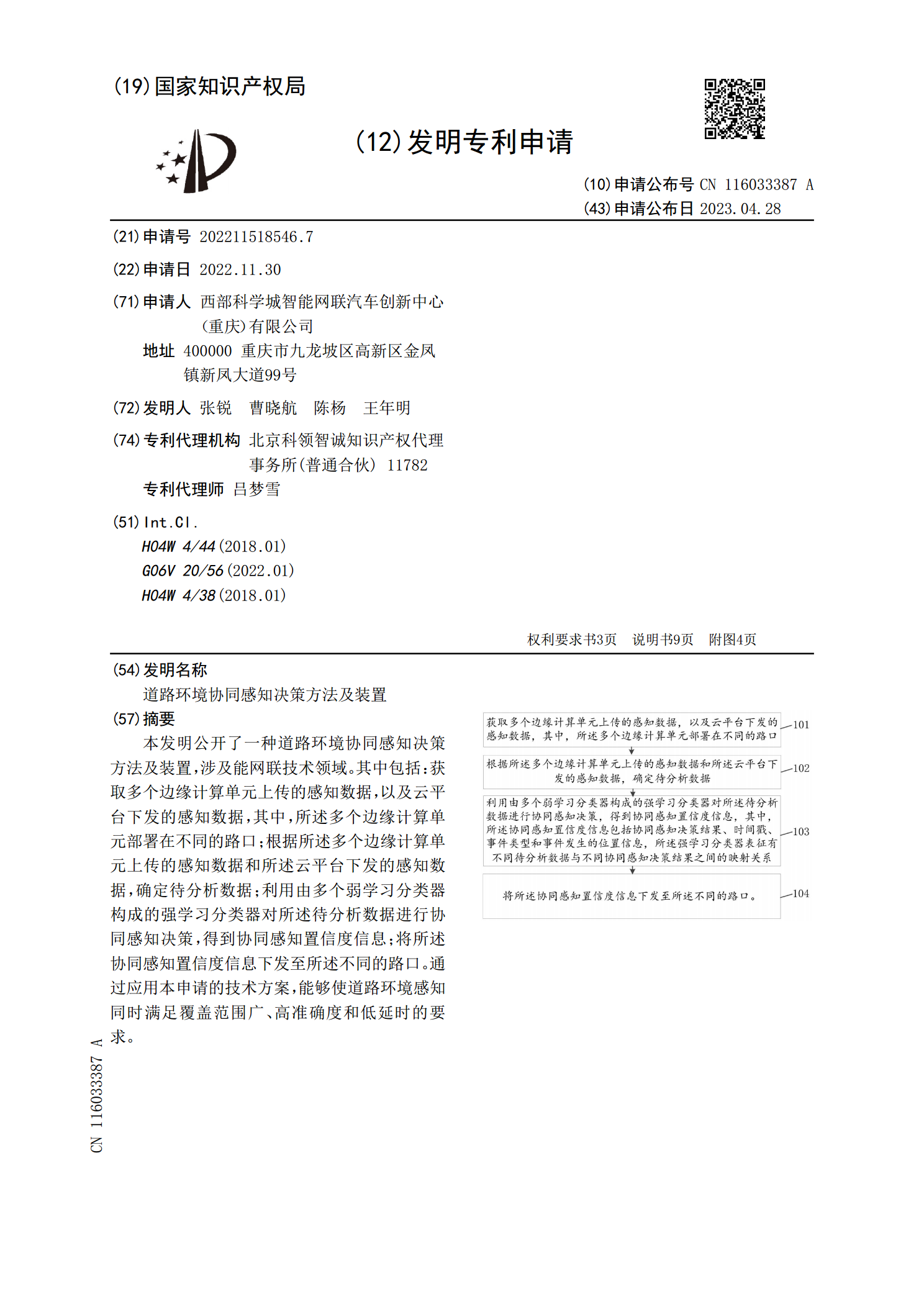
本发明公开了一种道路环境协同感知决策方法及装置,涉及能网联技术领域。其中包括:获取多个边缘计算单元上传的感知数据,以及云平台下发的感知数据,其中,所述多个边缘计算单元部署在不同的路口;根据所述多个边缘计算单元上传的感知数据和所述云平台下发的感知数据,确定待分析数据;利用由多个弱学习分类器构成的强学习分类器对所述待分析数据进行协同感知决策,得到协同感知置信度信息;将所述协同感知置信度信息下发至所述不同的路口。通过应用本申请的技术方案,能够使道路环境感知同时满足覆盖范围广、高准确度和低延时的要求。

车队协同感知方法、车队协同控制方法和系统.pdf
本申请的实施方式提供了一种车队协同感知方法、车队协同控制方法和系统。该车队协同感知方法包括:单车融合处理器对相应车辆上的各个传感器采集的信息进行融合,得到相应车辆周围的障碍物信息;通信装置将相应车辆周围的障碍物信息发送给多车融合处理器;多车融合处理器对所述车队中的每个车辆周围的障碍物信息进行融合,得到所述车队周围的障碍物信息。本申请将车队中所有车辆的单车智能感知信息进行二次融合得到针对整个车队的障碍物信息,有利于整个做出车队的协同控制决策,提升了车队协同控制的精准度,不仅克服了单车智能感知存在感知盲区及感
多传感器协同感知方法及装置.pdf
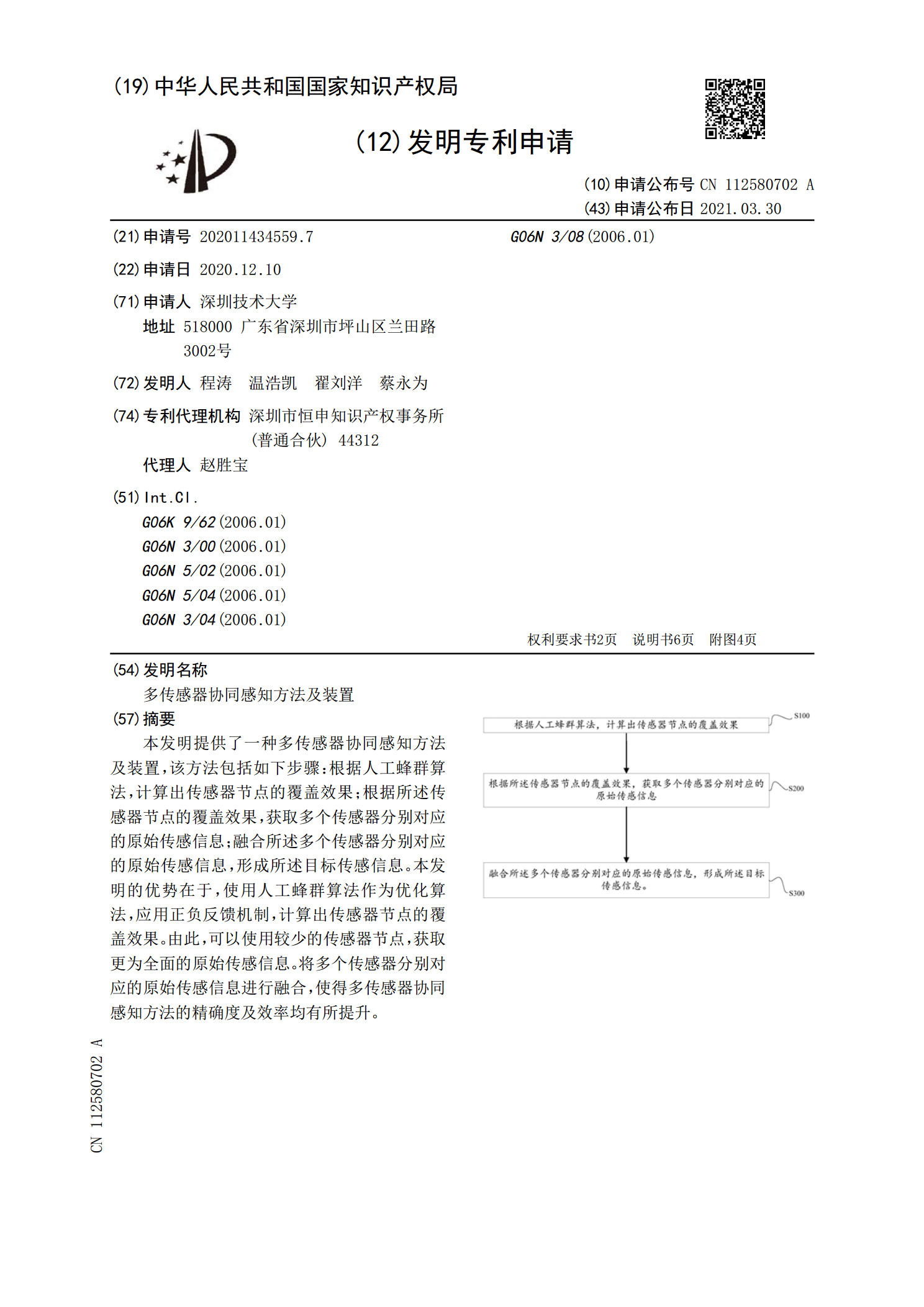
本发明提供了一种多传感器协同感知方法及装置,该方法包括如下步骤:根据人工蜂群算法,计算出传感器节点的覆盖效果;根据所述传感器节点的覆盖效果,获取多个传感器分别对应的原始传感信息;融合所述多个传感器分别对应的原始传感信息,形成所述目标传感信息。本发明的优势在于,使用人工蜂群算法作为优化算法,应用正负反馈机制,计算出传感器节点的覆盖效果。由此,可以使用较少的传感器节点,获取更为全面的原始传感信息。将多个传感器分别对应的原始传感信息进行融合,使得多传感器协同感知方法的精确度及效率均有所提升。
车路云协同感知的方法和系统.pdf
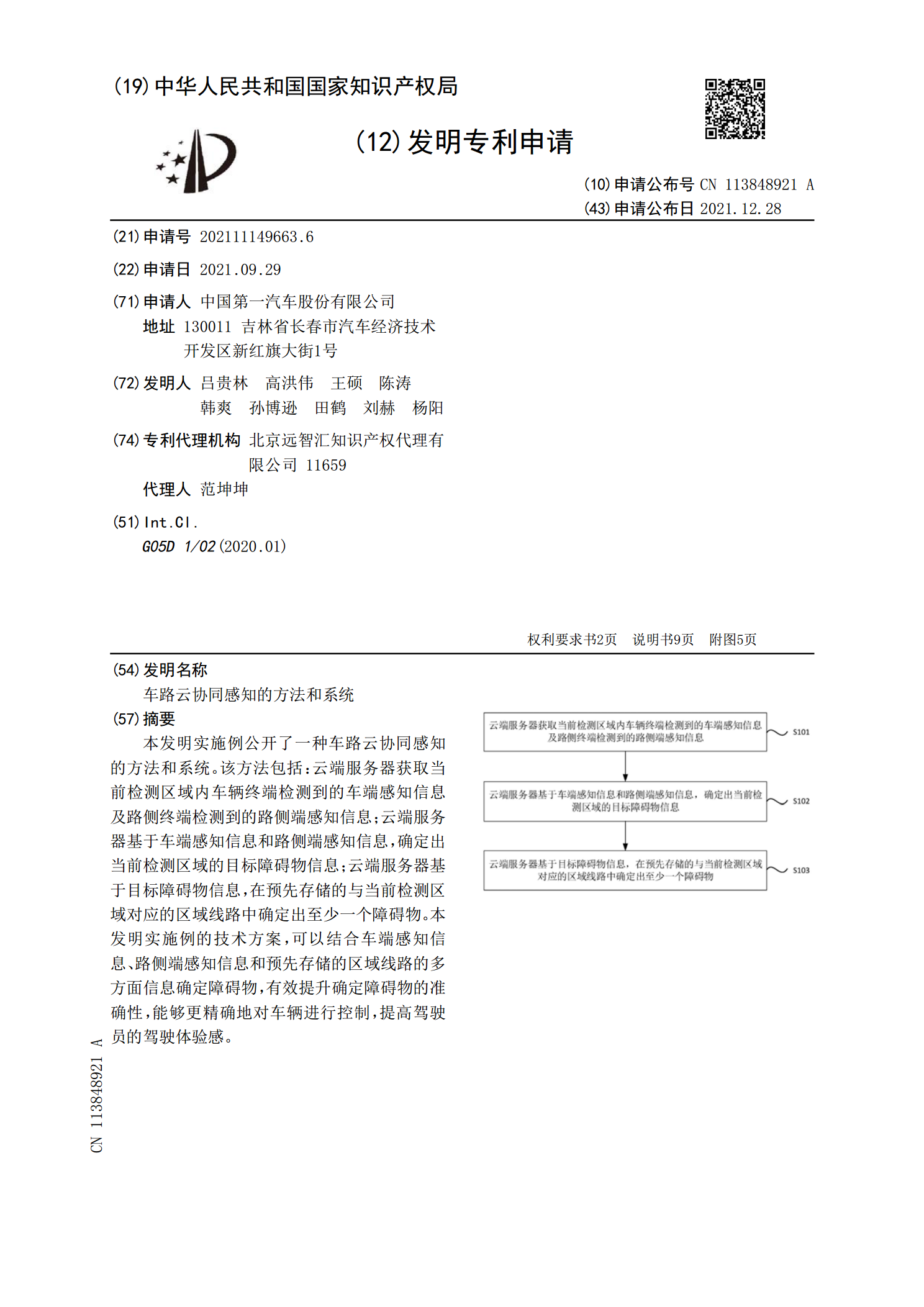
本发明实施例公开了一种车路云协同感知的方法和系统。该方法包括:云端服务器获取当前检测区域内车辆终端检测到的车端感知信息及路侧终端检测到的路侧端感知信息;云端服务器基于车端感知信息和路侧端感知信息,确定出当前检测区域的目标障碍物信息;云端服务器基于目标障碍物信息,在预先存储的与当前检测区域对应的区域线路中确定出至少一个障碍物。本发明实施例的技术方案,可以结合车端感知信息、路侧端感知信息和预先存储的区域线路的多方面信息确定障碍物,有效提升确定障碍物的准确性,能够更精确地对车辆进行控制,提高驾驶员的驾驶体验感。