
车辆盲区监测方法及系统.pdf

邻家****曼玉

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆盲区监测方法及系统.pdf
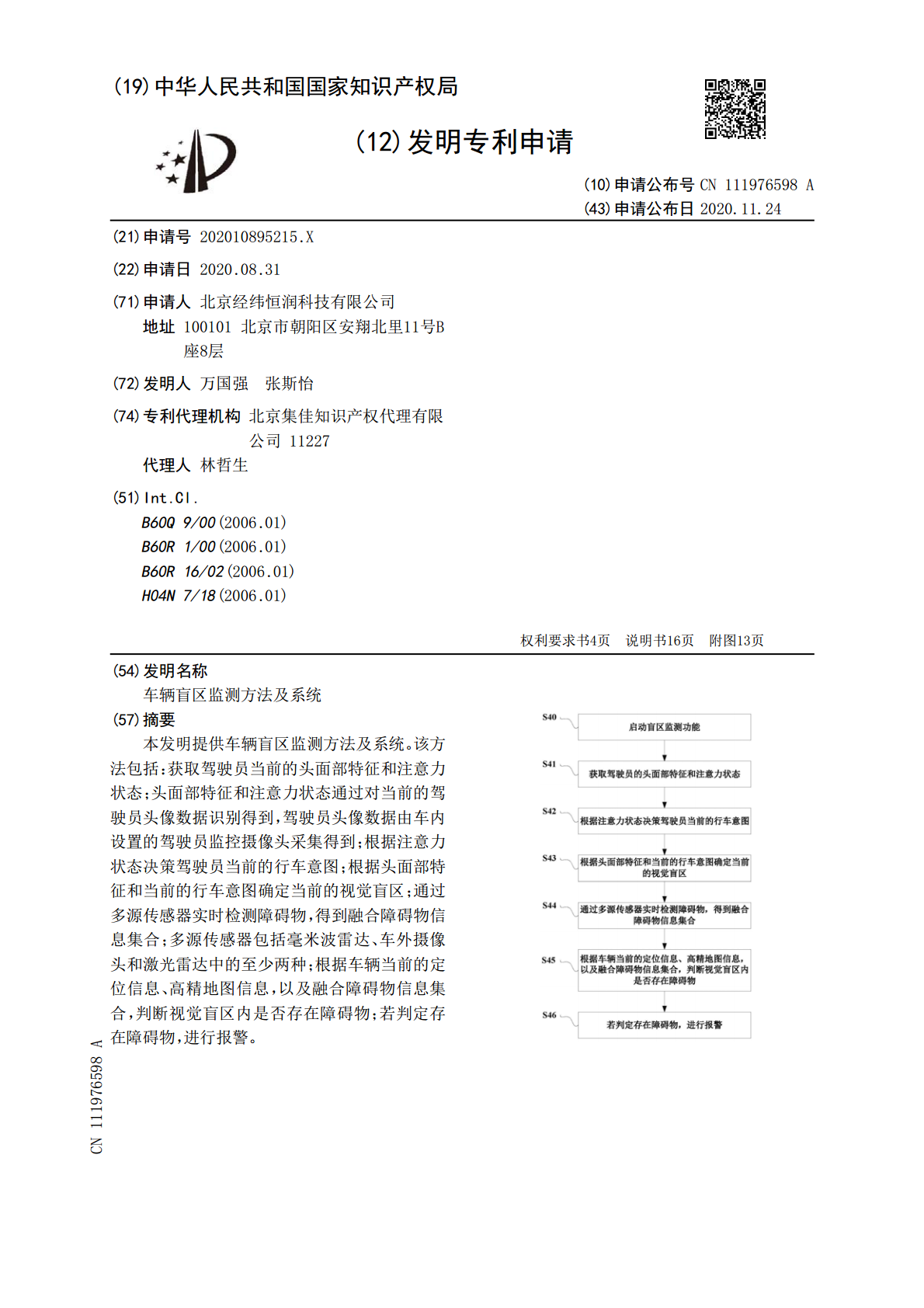
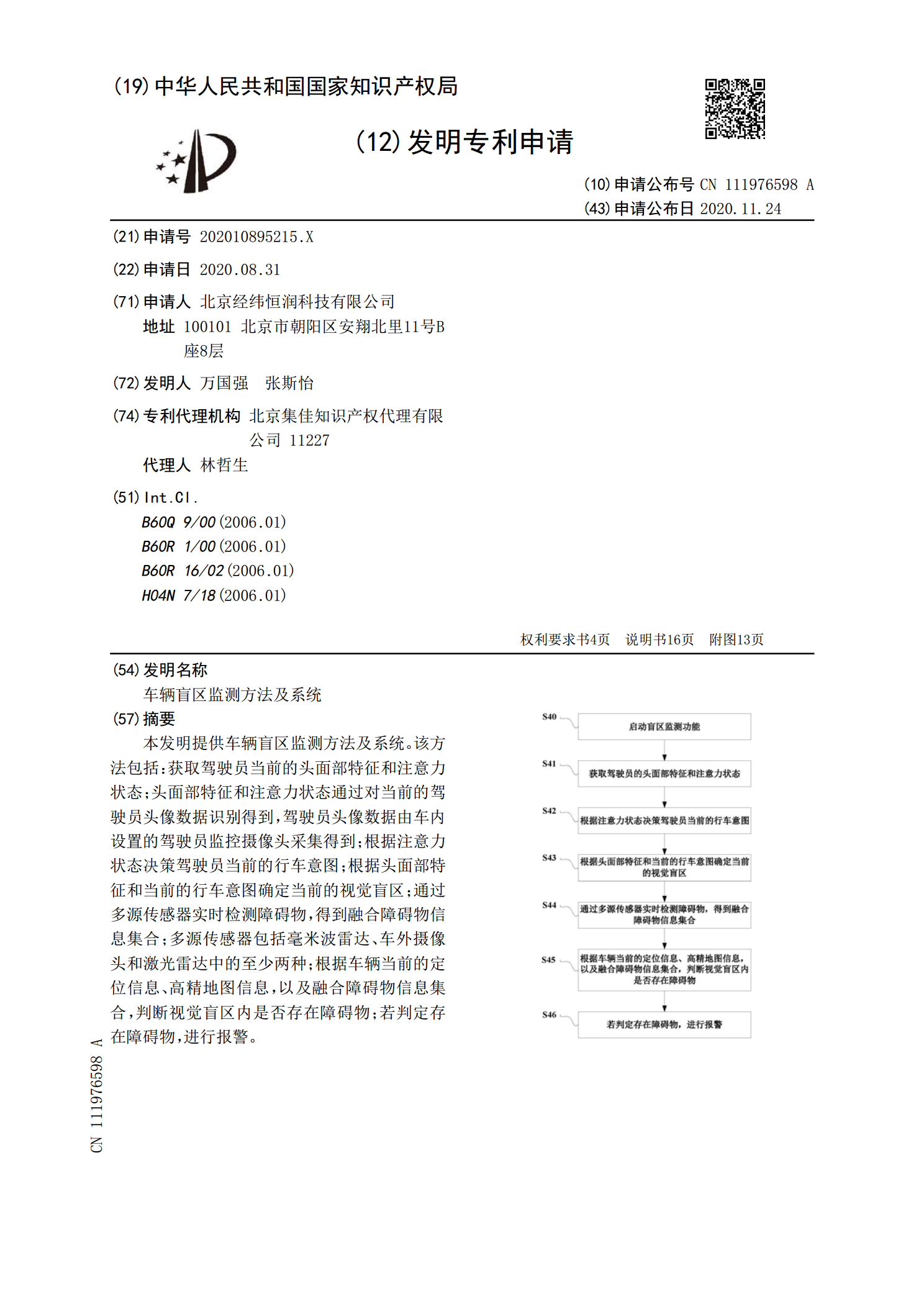
本发明提供车辆盲区监测方法及系统。该方法包括:获取驾驶员当前的头面部特征和注意力状态;头面部特征和注意力状态通过对当前的驾驶员头像数据识别得到,驾驶员头像数据由车内设置的驾驶员监控摄像头采集得到;根据注意力状态决策驾驶员当前的行车意图;根据头面部特征和当前的行车意图确定当前的视觉盲区;通过多源传感器实时检测障碍物,得到融合障碍物信息集合;多源传感器包括毫米波雷达、车外摄像头和激光雷达中的至少两种;根据车辆当前的定位信息、高精地图信息,以及融合障碍物信息集合,判断视觉盲区内是否存在障碍物;若判定存在障碍物,
车门盲区监测系统、监测方法及车辆.pdf
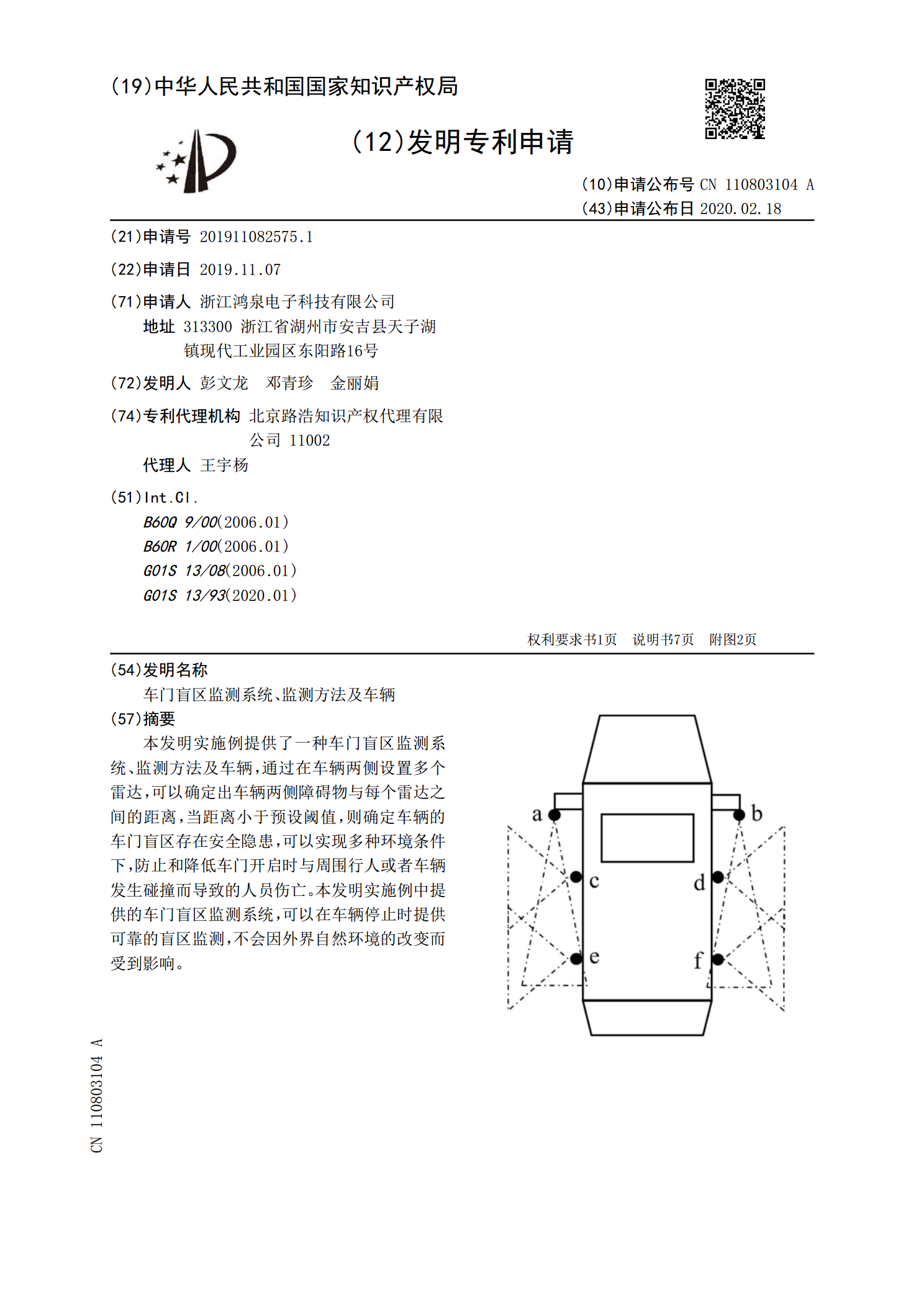
本发明实施例提供了一种车门盲区监测系统、监测方法及车辆,通过在车辆两侧设置多个雷达,可以确定出车辆两侧障碍物与每个雷达之间的距离,当距离小于预设阈值,则确定车辆的车门盲区存在安全隐患,可以实现多种环境条件下,防止和降低车门开启时与周围行人或者车辆发生碰撞而导致的人员伤亡。本发明实施例中提供的车门盲区监测系统,可以在车辆停止时提供可靠的盲区监测,不会因外界自然环境的改变而受到影响。
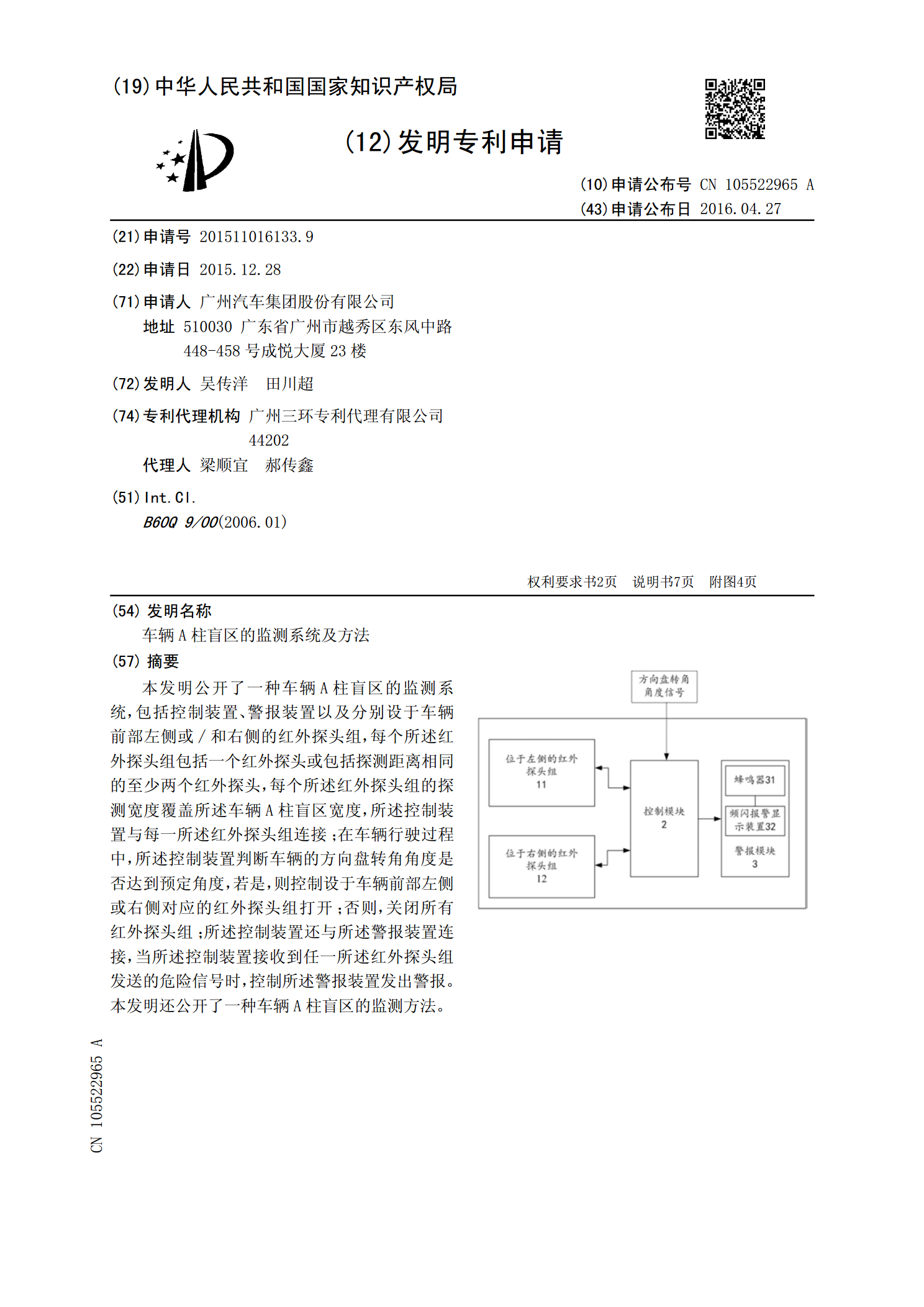
车辆A柱盲区的监测系统及方法.pdf
本发明公开了一种车辆A柱盲区的监测系统,包括控制装置、警报装置以及分别设于车辆前部左侧或/和右侧的红外探头组,每个所述红外探头组包括一个红外探头或包括探测距离相同的至少两个红外探头,每个所述红外探头组的探测宽度覆盖所述车辆A柱盲区宽度,所述控制装置与每一所述红外探头组连接;在车辆行驶过程中,所述控制装置判断车辆的方向盘转角角度是否达到预定角度,若是,则控制设于车辆前部左侧或右侧对应的红外探头组打开;否则,关闭所有红外探头组;所述控制装置还与所述警报装置连接,当所述控制装置接收到任一所述红外探头组发送的危险

车辆盲区监测装置、方法及系统.pdf
本发明提供一种车辆盲区监测装置、方法及系统,所述车辆盲区监测装置包括:安装在车辆后部的超声波探测装置以及控制芯片,所述超声波探测装置用于发送超声波信号与接收回波信号,对车辆盲区进行测距;所述控制芯片连接所述超声波探测装置,用于接收所述回波信号,对所述回波信号进行分析得到进入车辆盲区的目标的运动轨迹;根据所述运动轨迹预测判断目标是否进入告警区域,并在进入时发送报警电信号。本发明实现了对车辆盲区的监测覆盖,并对盲区的监测目标进行提前预判,从而给驾驶员提供足够的反应时间,减少碰撞的风险,提高车辆行驶安全性。
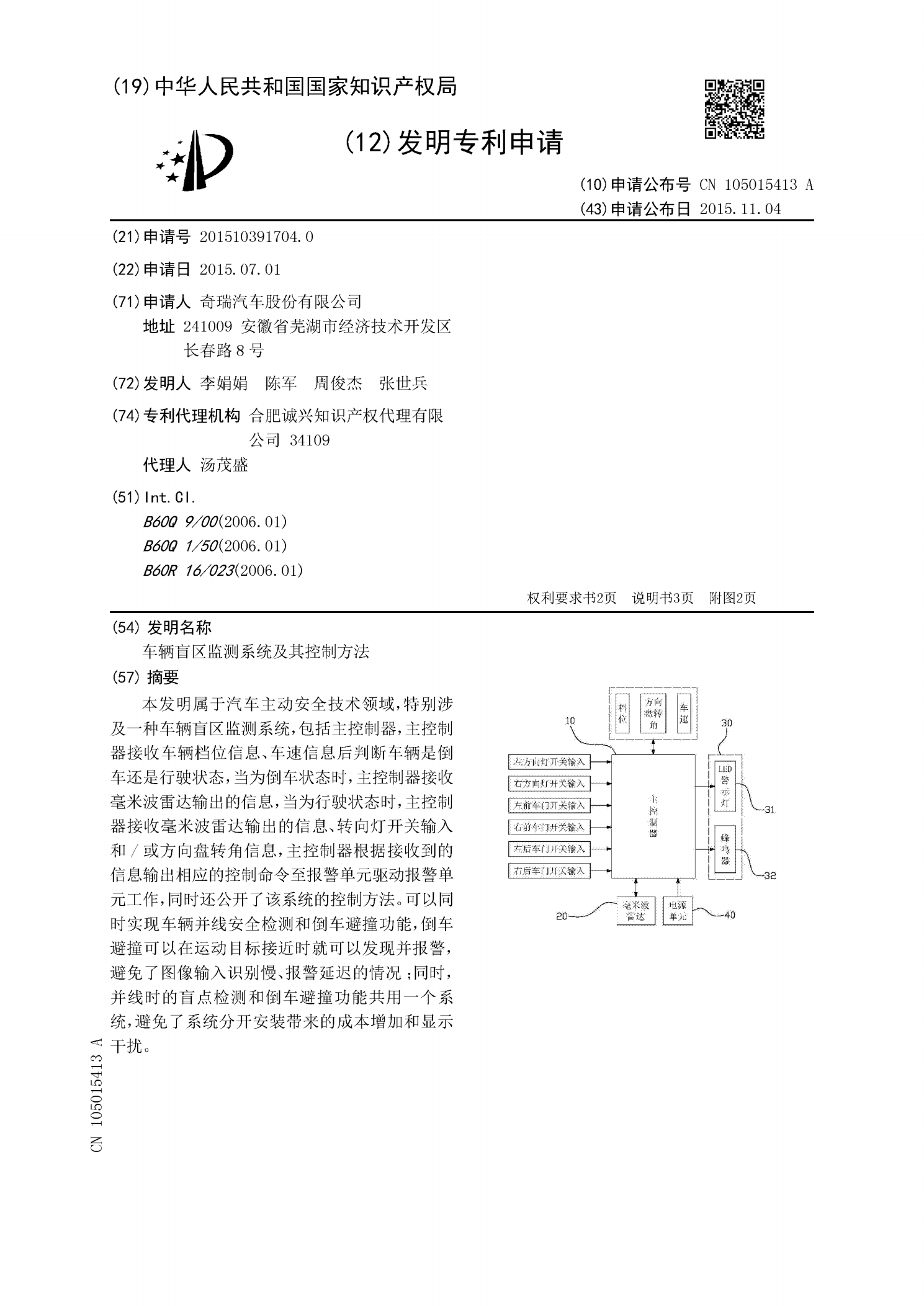
车辆盲区监测系统及其控制方法.pdf
本发明属于汽车主动安全技术领域,特别涉及一种车辆盲区监测系统,包括主控制器,主控制器接收车辆档位信息、车速信息后判断车辆是倒车还是行驶状态,当为倒车状态时,主控制器接收毫米波雷达输出的信息,当为行驶状态时,主控制器接收毫米波雷达输出的信息、转向灯开关输入和/或方向盘转角信息,主控制器根据接收到的信息输出相应的控制命令至报警单元驱动报警单元工作,同时还公开了该系统的控制方法。可以同时实现车辆并线安全检测和倒车避撞功能,倒车避撞可以在运动目标接近时就可以发现并报警,避免了图像输入识别慢、报警延迟的情况;同时,