
一种基于AI视觉辅助的盲区检测方法.pdf

王秋****哥哥

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于AI视觉辅助的盲区检测方法.pdf
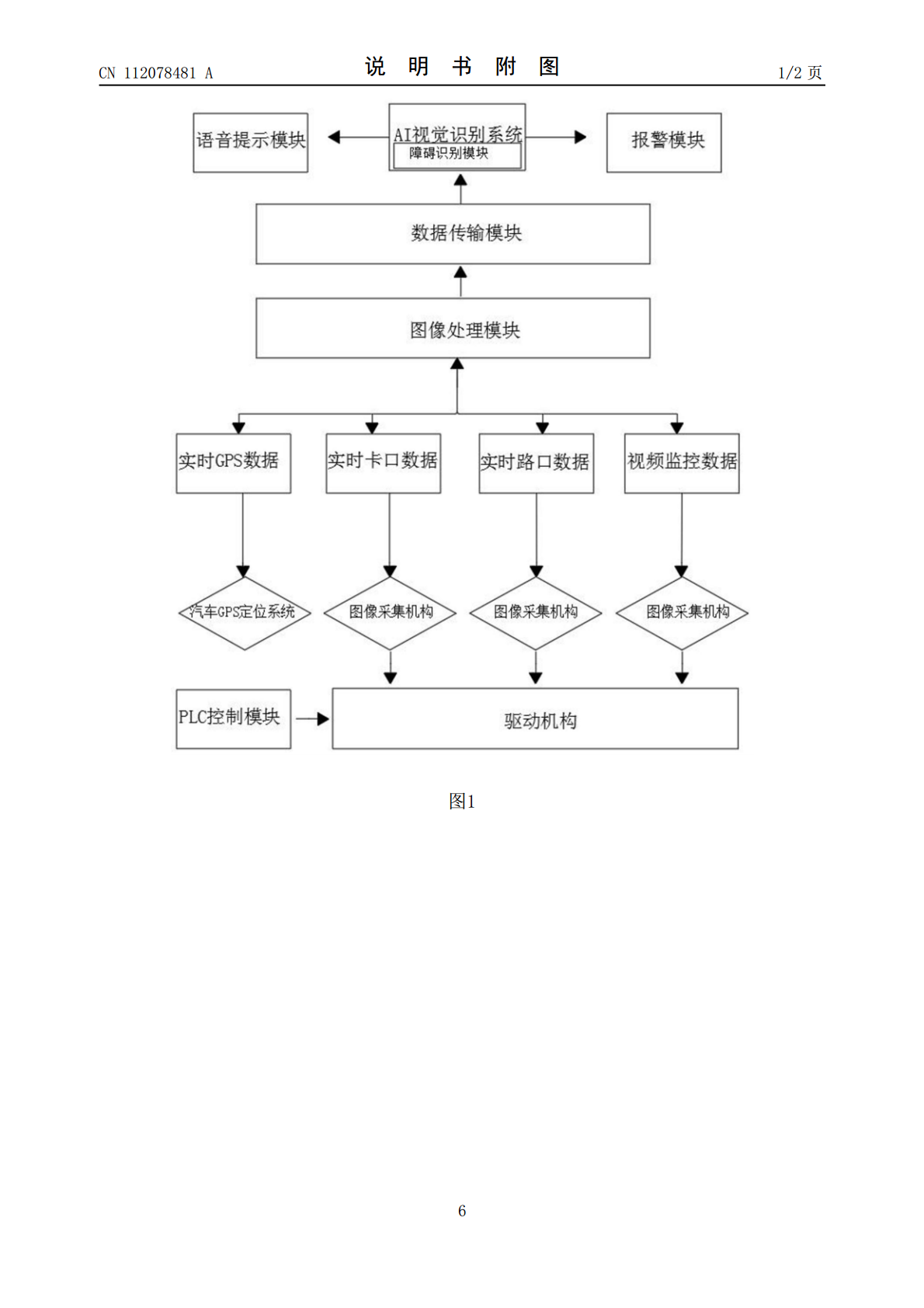
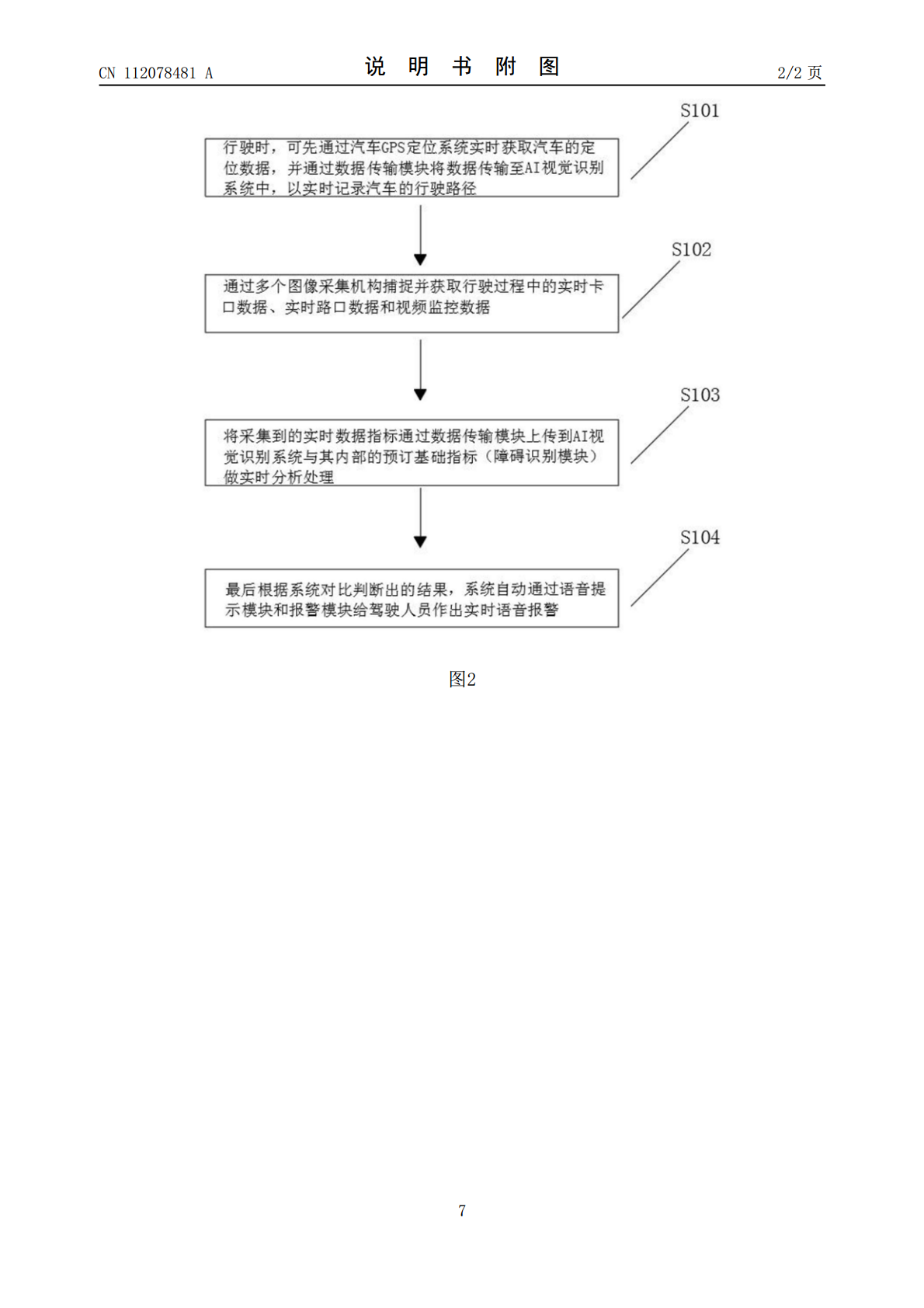
本发明公开了一种基于AI视觉辅助的盲区检测方法,包括AI视觉识别主机和多个图像采集机构,AI视觉识别系统包括障碍识别模块、语音提示模块和报警模块,还包括与AI视觉识别系统建立信号连接的实时GPS数据、实时卡口数据、实时路口数据和视频监控数据,本发明一种基于AI视觉辅助的盲区检测方法,通过设置有多个图像采集机构和AI视觉系统,可将采集到的实时路段数据传输至AI视觉系统,并由其设置的障碍识别模块进行识别和判断,从而对驾驶员进行语音提示和报警,且多个图像采集机构包括设置在汽车作业后视镜处的两个摄像头,摄像头还可
一种基于视觉的盲区检测系统方法.pdf
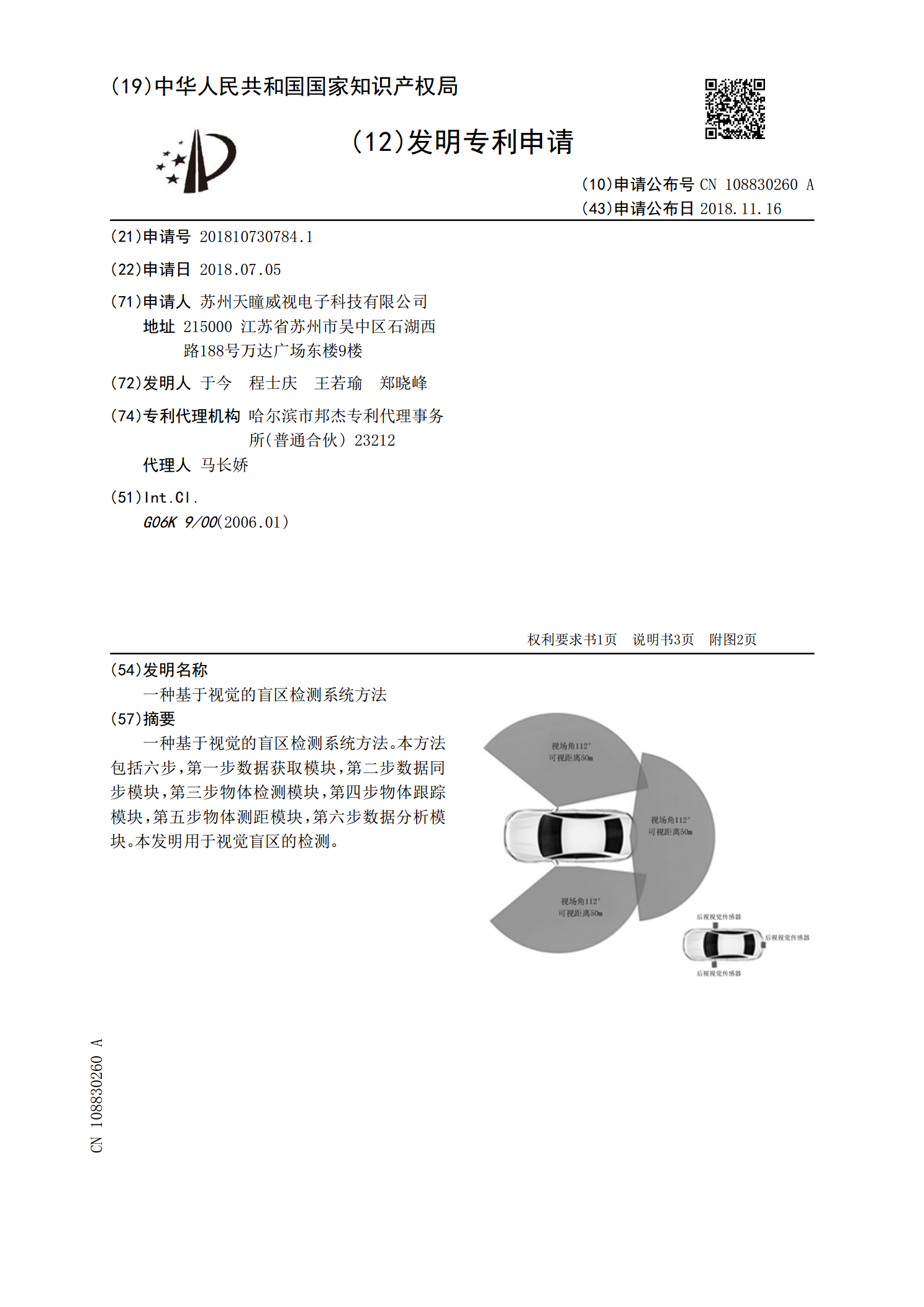
一种基于视觉的盲区检测系统方法。本方法包括六步,第一步数据获取模块,第二步数据同步模块,第三步物体检测模块,第四步物体跟踪模块,第五步物体测距模块,第六步数据分析模块。本发明用于视觉盲区的检测。
一种视觉盲区检测方法.pdf
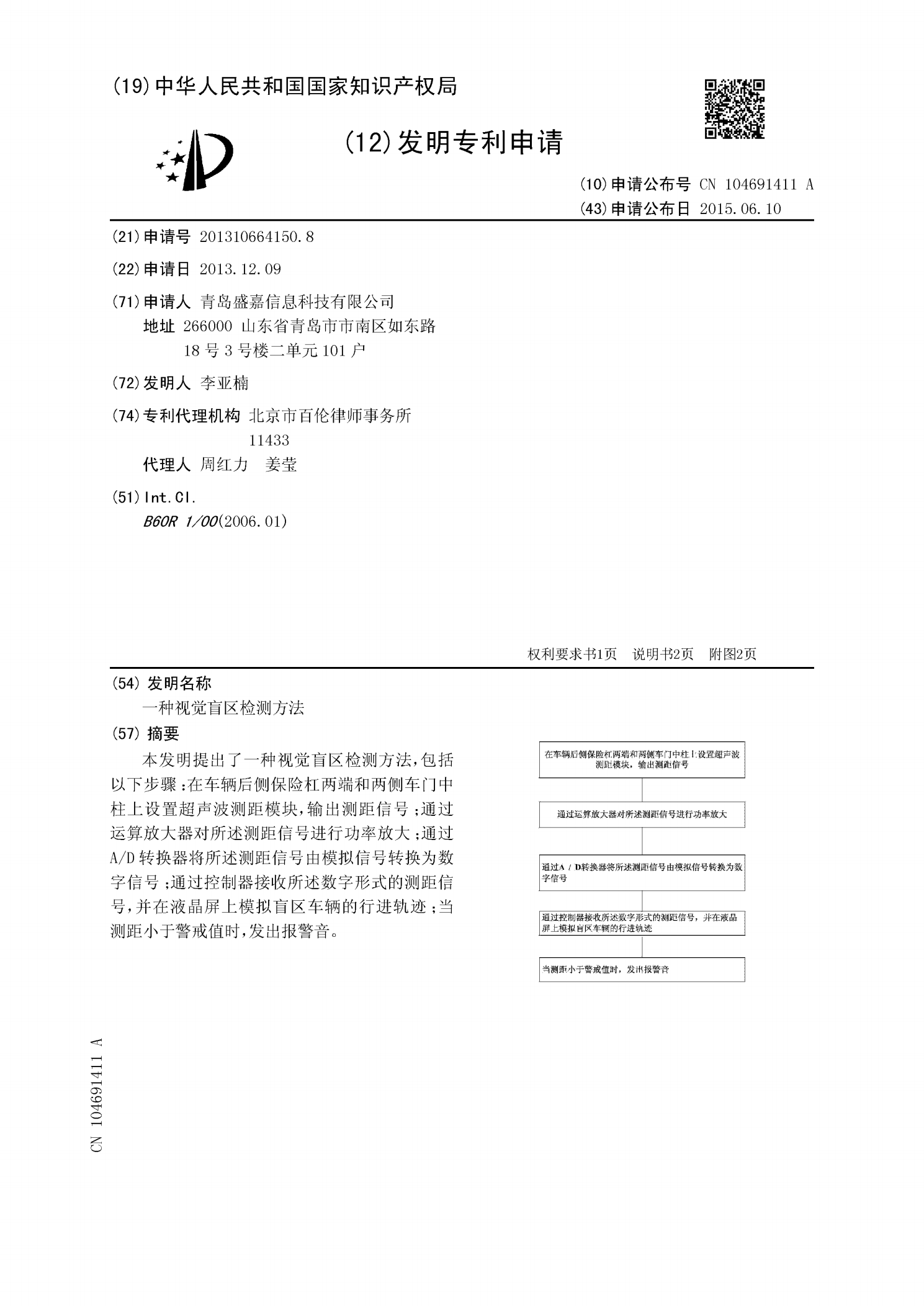
本发明提出了一种视觉盲区检测方法,包括以下步骤:在车辆后侧保险杠两端和两侧车门中柱上设置超声波测距模块,输出测距信号;通过运算放大器对所述测距信号进行功率放大;通过A/D转换器将所述测距信号由模拟信号转换为数字信号;通过控制器接收所述数字形式的测距信号,并在液晶屏上模拟盲区车辆的行进轨迹;当测距小于警戒值时,发出报警音。
基于车载盲区视觉场景分析控制转向扭矩的车道辅助方法.pdf
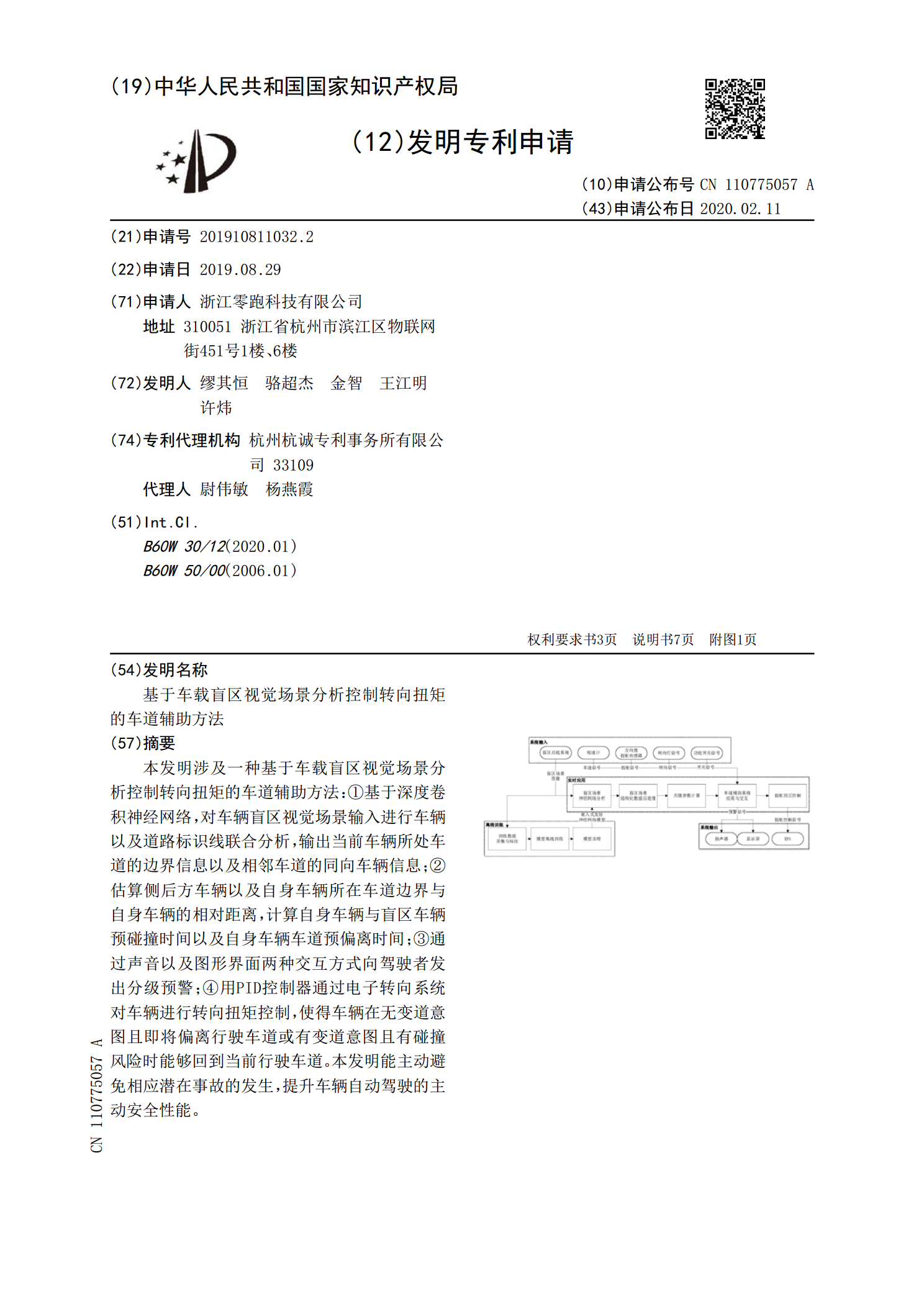
本发明涉及一种基于车载盲区视觉场景分析控制转向扭矩的车道辅助方法:①基于深度卷积神经网络,对车辆盲区视觉场景输入进行车辆以及道路标识线联合分析,输出当前车辆所处车道的边界信息以及相邻车道的同向车辆信息;②估算侧后方车辆以及自身车辆所在车道边界与自身车辆的相对距离,计算自身车辆与盲区车辆预碰撞时间以及自身车辆车道预偏离时间;③通过声音以及图形界面两种交互方式向驾驶者发出分级预警;④用PID控制器通过电子转向系统对车辆进行转向扭矩控制,使得车辆在无变道意图且即将偏离行驶车道或有变道意图且有碰撞风险时能够回到当
一种汽车转弯盲区视觉辅助装置.pdf
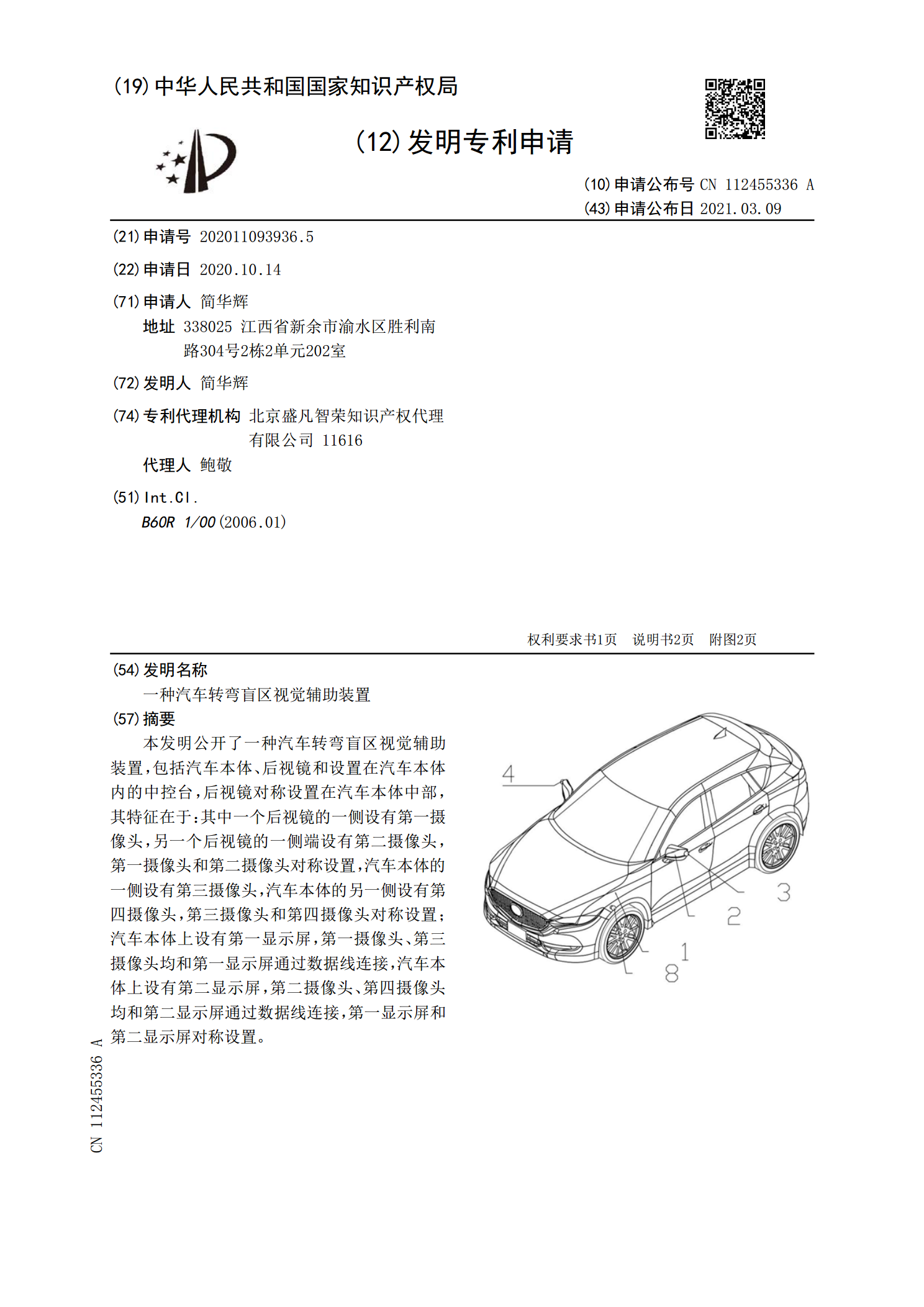
本发明公开了一种汽车转弯盲区视觉辅助装置,包括汽车本体、后视镜和设置在汽车本体内的中控台,后视镜对称设置在汽车本体中部,其特征在于:其中一个后视镜的一侧设有第一摄像头,另一个后视镜的一侧端设有第二摄像头,第一摄像头和第二摄像头对称设置,汽车本体的一侧设有第三摄像头,汽车本体的另一侧设有第四摄像头,第三摄像头和第四摄像头对称设置;汽车本体上设有第一显示屏,第一摄像头、第三摄像头均和第一显示屏通过数据线连接,汽车本体上设有第二显示屏,第二摄像头、第四摄像头均和第二显示屏通过数据线连接,第一显示屏和第二显示屏对