
基于车载盲区视觉场景分析控制转向扭矩的车道辅助方法.pdf

秋花****姐姐


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于车载盲区视觉场景分析控制转向扭矩的车道辅助方法.pdf
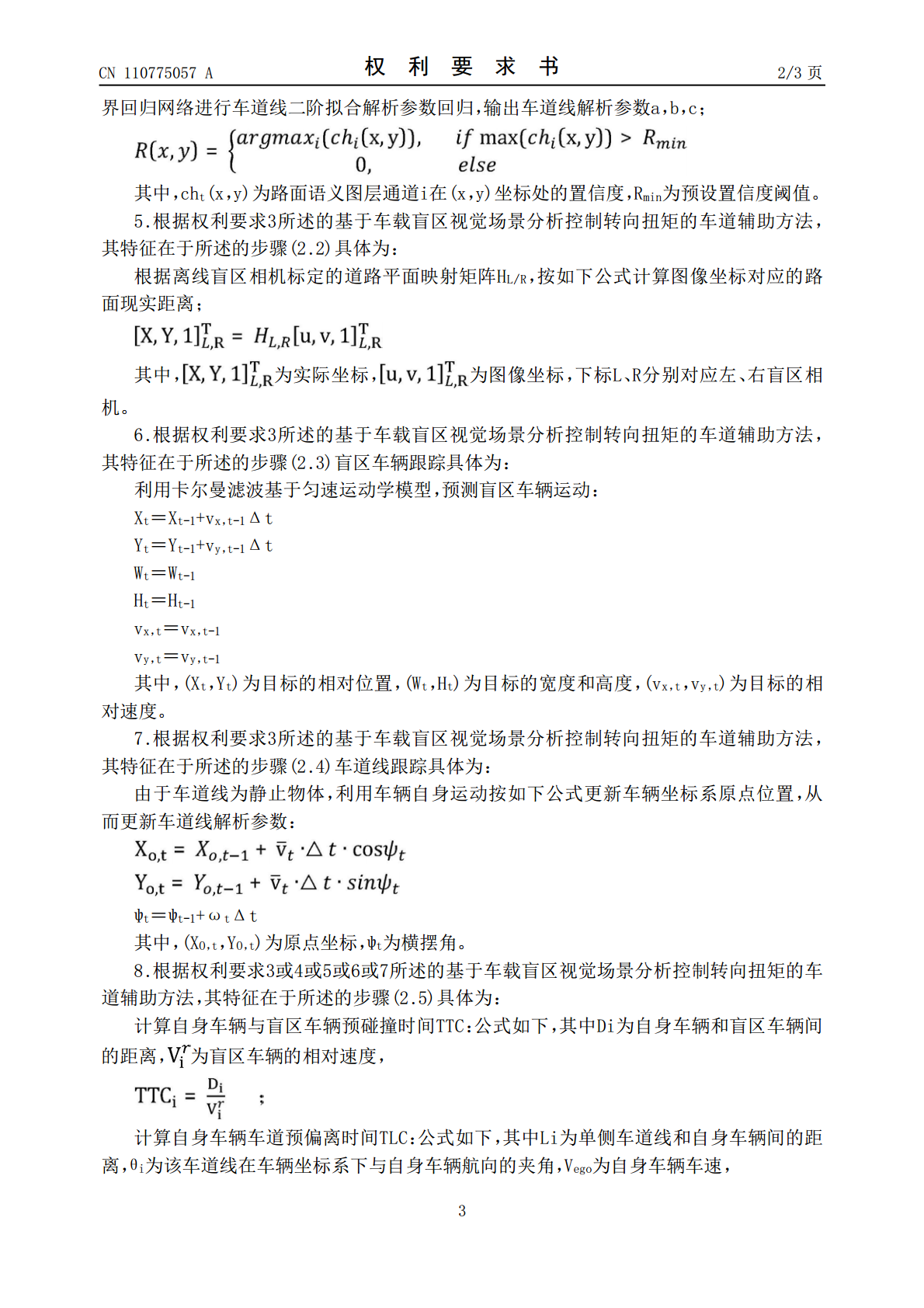
本发明涉及一种基于车载盲区视觉场景分析控制转向扭矩的车道辅助方法:①基于深度卷积神经网络,对车辆盲区视觉场景输入进行车辆以及道路标识线联合分析,输出当前车辆所处车道的边界信息以及相邻车道的同向车辆信息;②估算侧后方车辆以及自身车辆所在车道边界与自身车辆的相对距离,计算自身车辆与盲区车辆预碰撞时间以及自身车辆车道预偏离时间;③通过声音以及图形界面两种交互方式向驾驶者发出分级预警;④用PID控制器通过电子转向系统对车辆进行转向扭矩控制,使得车辆在无变道意图且即将偏离行驶车道或有变道意图且有碰撞风险时能够回到当

基于行人与右转车道的视觉盲区优化方法.pptx
基于行人与右转车道的视觉盲区优化方法目录行人安全问题行人与右转车道的视觉盲区行人安全事故原因行人安全问题的紧迫性视觉盲区优化方法扩大右转车道的视野范围引入辅助设备优化交通信号灯强化驾驶员培训技术实现图像处理技术传感器技术人工智能技术通信技术应用场景与效果评估应用场景选择预期效果评估实际效果评估效果对比分析推广与普及政策支持与引导企业参与与合作社会宣传与教育国际交流与合作THANKYOU

一种车载转向盲区辅助影像系统.pdf
本发明公开了一种车载转向盲区辅助影像系统,包括第一超声波传感器和行车电脑,所述第一超声波传感器镶嵌在车体的右侧前门上,且第一超声波传感器与第一摄像头安装在一起,第二超声波传感器镶嵌在车体的尾部,且第二摄像头通过螺栓安装在车体的车牌正上方,安装箱通过螺栓固定在车体的后备箱内部,振动电机通过机座安装在驾驶员座椅上,图像传感器与第二摄像头电性连接,指示灯镶嵌在中控台的下侧,且指示灯右侧是报警器,PCB板通过螺钉安装在安装箱的内部。该车载转向盲区辅助影像系统,具有避免车辆在转向的时候交通事故的发生,智能化程度高,
一种基于AI视觉辅助的盲区检测方法.pdf
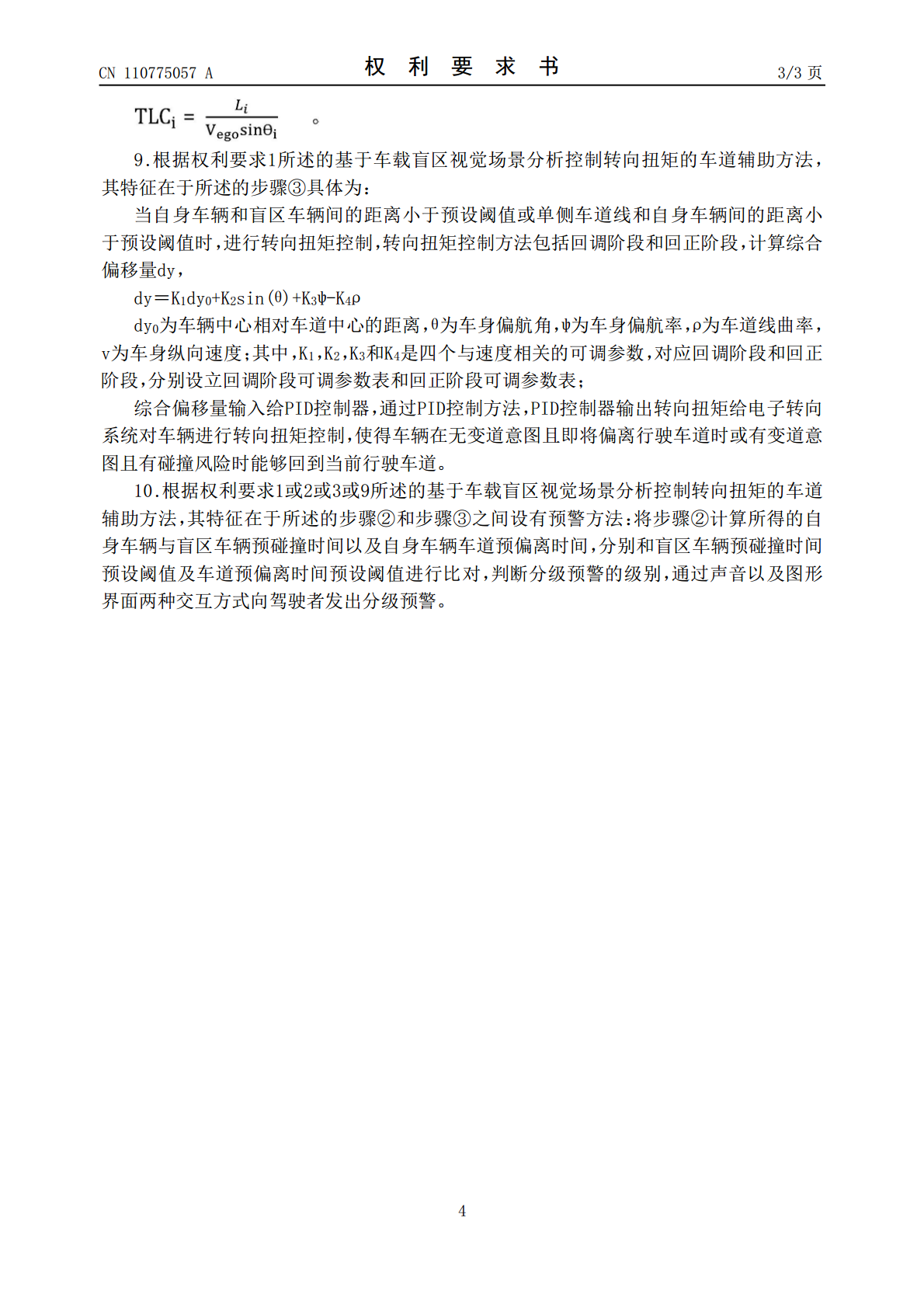
本发明公开了一种基于AI视觉辅助的盲区检测方法,包括AI视觉识别主机和多个图像采集机构,AI视觉识别系统包括障碍识别模块、语音提示模块和报警模块,还包括与AI视觉识别系统建立信号连接的实时GPS数据、实时卡口数据、实时路口数据和视频监控数据,本发明一种基于AI视觉辅助的盲区检测方法,通过设置有多个图像采集机构和AI视觉系统,可将采集到的实时路段数据传输至AI视觉系统,并由其设置的障碍识别模块进行识别和判断,从而对驾驶员进行语音提示和报警,且多个图像采集机构包括设置在汽车作业后视镜处的两个摄像头,摄像头还可

基于机器视觉的车道偏离辅助系统控制研究.docx
基于机器视觉的车道偏离辅助系统控制研究标题:基于机器视觉的车道偏离辅助系统控制研究摘要:随着交通问题的日益突出,车辆安全成为人们关注的焦点之一。因此,研发车道偏离辅助系统以提高驾驶员的安全性和驾驶舒适度变得至关重要。在本论文中,我们将重点研究基于机器视觉的车道偏离辅助系统控制,并通过实验验证其有效性。引言:车道偏离是交通事故的主要原因之一,也是大量交通事故的起因。传统的车道偏离警告系统主要基于传感器数据进行检测,然而这种方法容易受到光照条件和传感器精度等因素的影响。机器视觉作为一种新兴的技术,能够准确地检