
无车底盲区的车载全景图的生成方法、装置及存储介质.pdf

骊蓉****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无车底盲区的车载全景图的生成方法、装置及存储介质.pdf
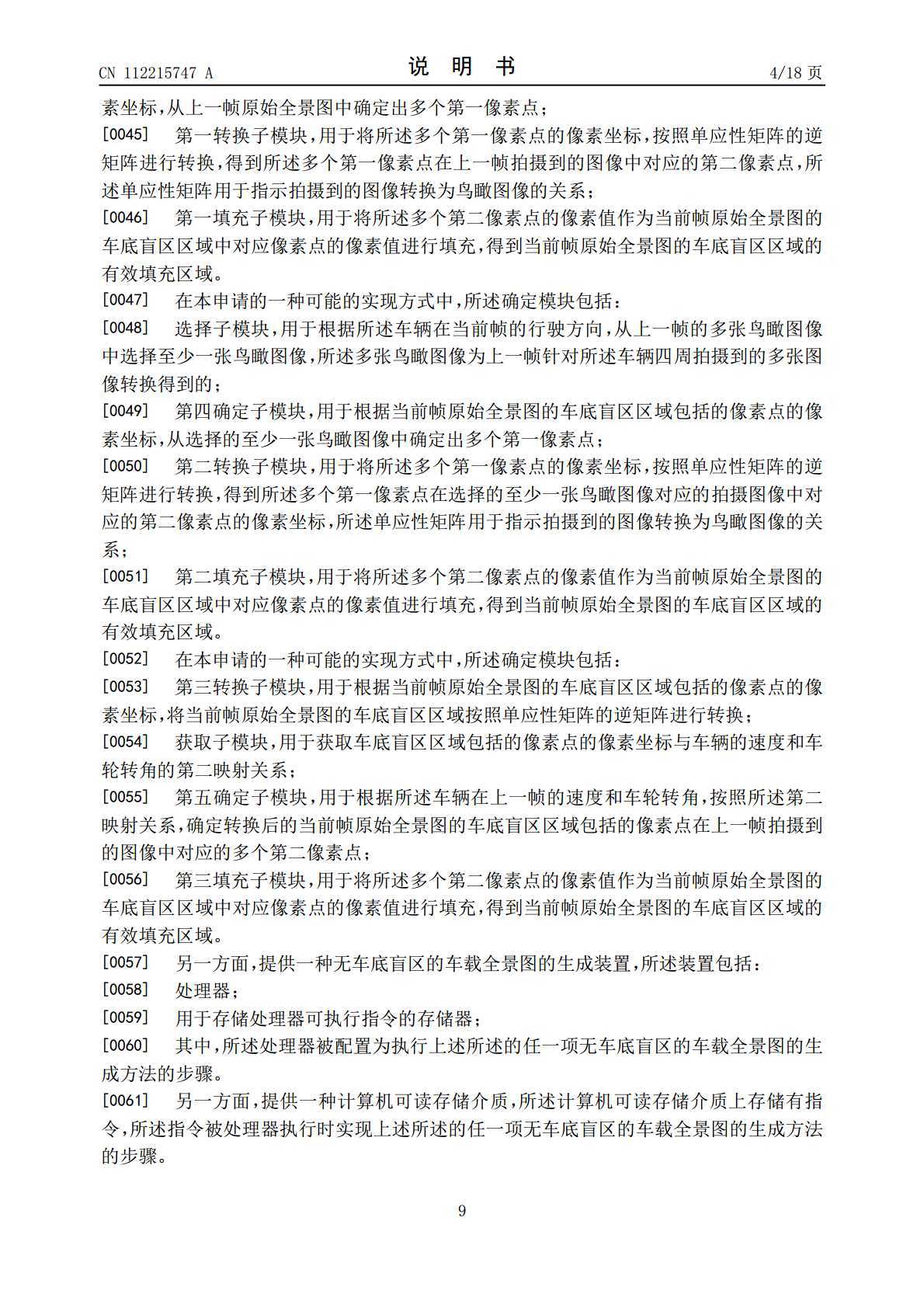
本申请公开了一种无车底盲区的车载全景图的生成方法、装置及存储介质,属于视觉技术领域。所述方法包括:预测当前帧原始全景图的车底盲区区域包括的像素点的像素坐标。根据当前帧车底盲区区域包括的像素点的像素坐标,从上一帧拍摄到的图像中确定当前帧车底盲区区域的有效填充区域,将当前帧之前的连续多帧车底盲区区域的有效填充区域,以及当前帧车底盲区区域的有效填充区域进行叠加,得到当前帧的车底盲区填充子图,将车底盲区填充子图覆盖在当前帧原始全景图的车底盲区区域上,得到无车底盲区的车载全景图。这样,可以减小计算开销,提高盲区填充
车辆盲区处理方法、装置、车载终端及存储介质.pdf
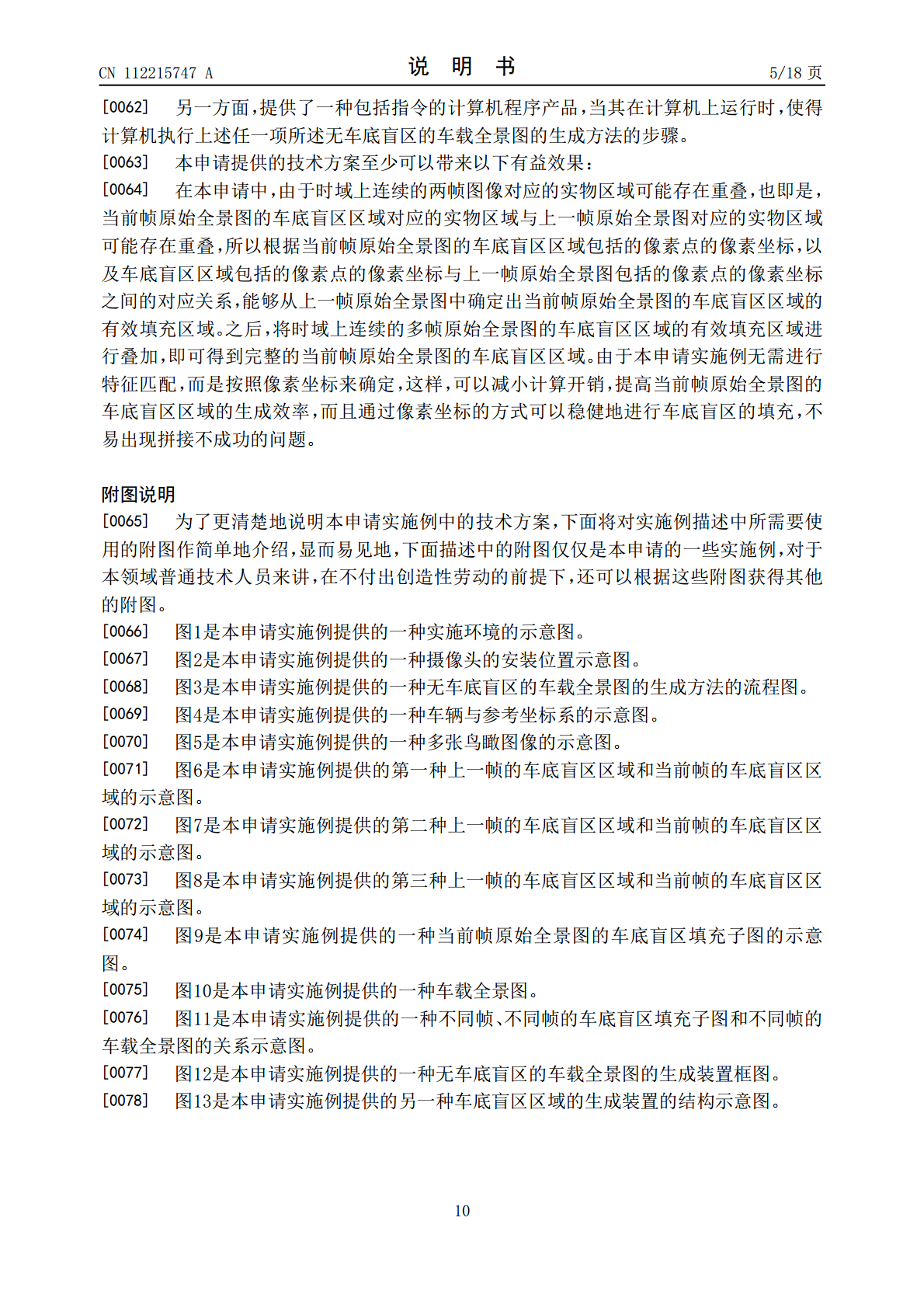
本申请公开了一种车辆盲区处理方法、装置、车载终端及存储介质,通过获取目标车辆在行驶过程中的第一当前环境信息;基于所述第一当前环境信息,确定所述目标车辆的盲区检测结果;向云服务器发送所述第一当前环境信息;在所述目标车辆的盲区检测结果用于指示所述目标车辆存在视野盲区的情况下,接收所述云服务器发送的实时路况图像信息,其中,所述实时路况图像信息为基于所述第一当前环境信息和关联车辆在行驶过程中采集的第二当前环境信息而确定;显示所述实时路况图像信息。本申请通过目标车辆的第一当前环境信息和关联车辆的第二当前环境信息确定
车辆盲区检测处理方法、装置、车载终端和存储介质.pdf
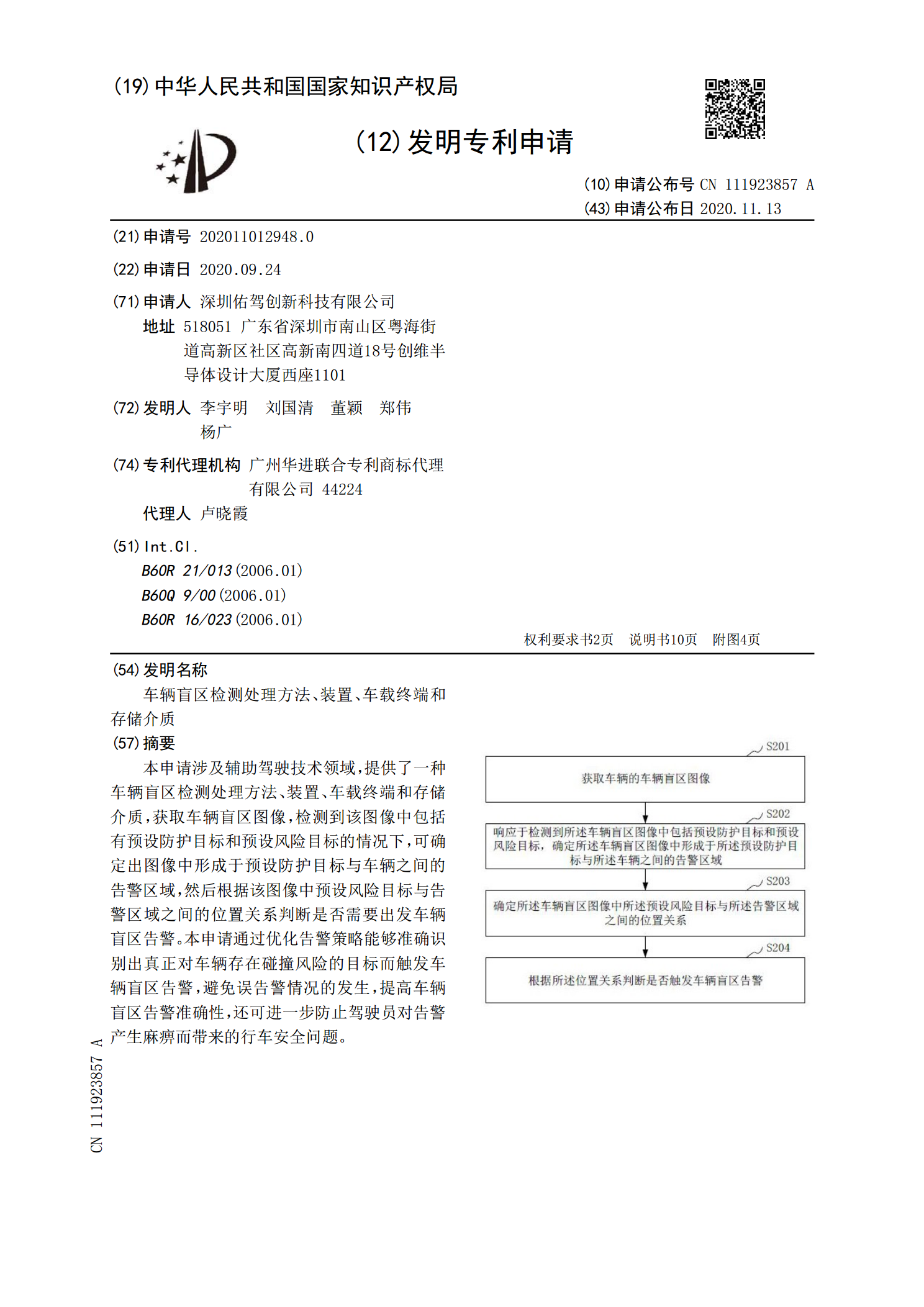
本申请涉及辅助驾驶技术领域,提供了一种车辆盲区检测处理方法、装置、车载终端和存储介质,获取车辆盲区图像,检测到该图像中包括有预设防护目标和预设风险目标的情况下,可确定出图像中形成于预设防护目标与车辆之间的告警区域,然后根据该图像中预设风险目标与告警区域之间的位置关系判断是否需要出发车辆盲区告警。本申请通过优化告警策略能够准确识别出真正对车辆存在碰撞风险的目标而触发车辆盲区告警,避免误告警情况的发生,提高车辆盲区告警准确性,还可进一步防止驾驶员对告警产生麻痹而带来的行车安全问题。
全景图像生成方法、装置、设备及存储介质.pdf
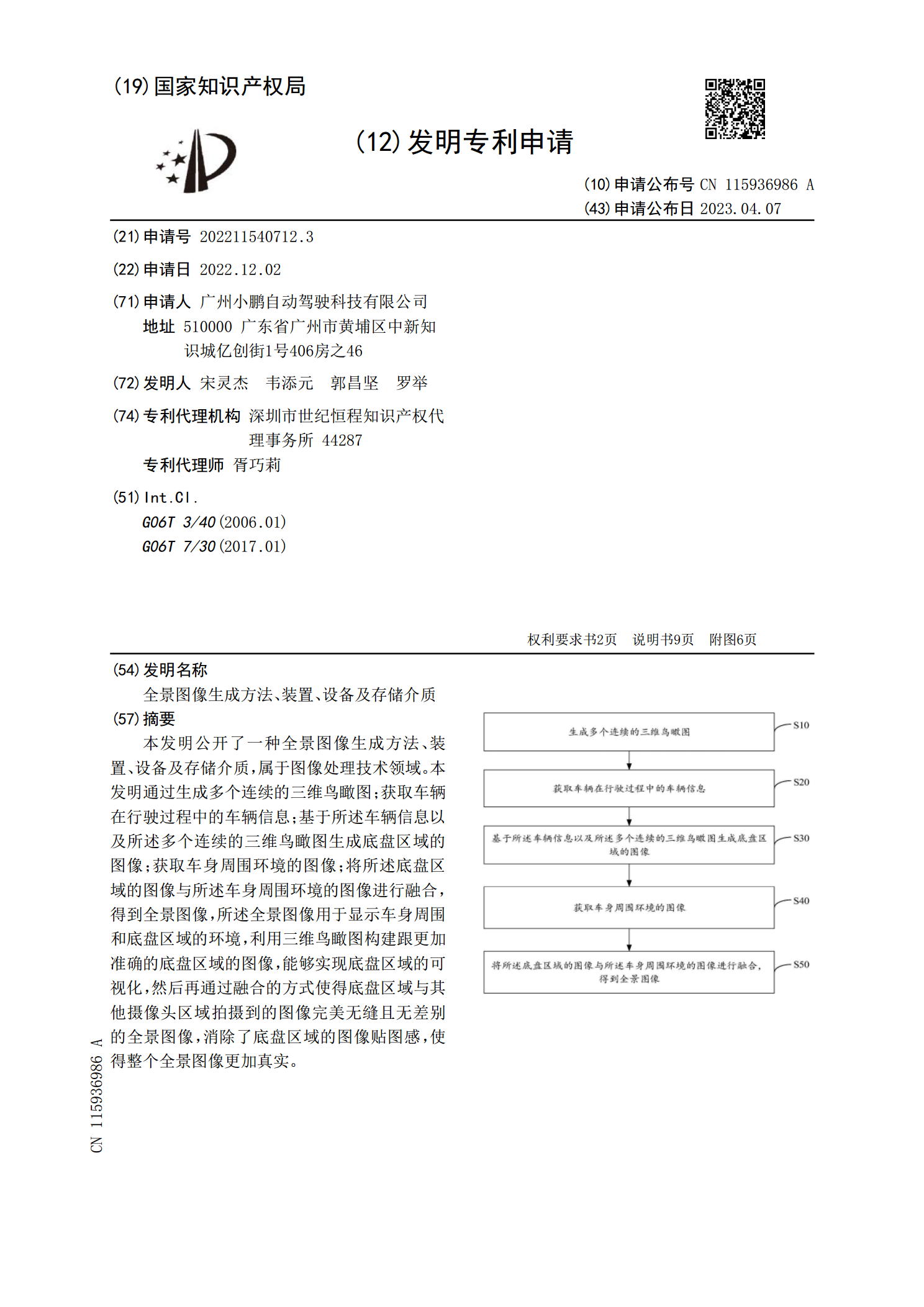
本发明公开了一种全景图像生成方法、装置、设备及存储介质,属于图像处理技术领域。本发明通过生成多个连续的三维鸟瞰图;获取车辆在行驶过程中的车辆信息;基于所述车辆信息以及所述多个连续的三维鸟瞰图生成底盘区域的图像;获取车身周围环境的图像;将所述底盘区域的图像与所述车身周围环境的图像进行融合,得到全景图像,所述全景图像用于显示车身周围和底盘区域的环境,利用三维鸟瞰图构建跟更加准确的底盘区域的图像,能够实现底盘区域的可视化,然后再通过融合的方式使得底盘区域与其他摄像头区域拍摄到的图像完美无缝且无差别的全景图像,消

全景图像的生成方法、装置、设备及存储介质.pdf
本申请实施例公开了全景图像的生成方法、装置、设备及存储介质,涉及直播技术领域,该方法通过接收直播服务器下发的由多张全景子图片按照预设的布局拼接于一背景图像中得到的合成图片,逐行逐列对合成图片进行扫描,获取全景子图片在背景图像上的边缘像素点数组,根据边缘像素点数组以及布局确定全景子图片的边缘线,沿着边缘线对合成图片进行裁剪并提取出各张全景子图片,将全景子图片渲染生成全景图像。本技术方案实现了对全景子图片的压缩处理,减少了图片传输的数据量,提高传输效率。