
全景图像生成方法、装置、设备及存储介质.pdf

黛娥****ak


1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全景图像生成方法、装置、设备及存储介质.pdf
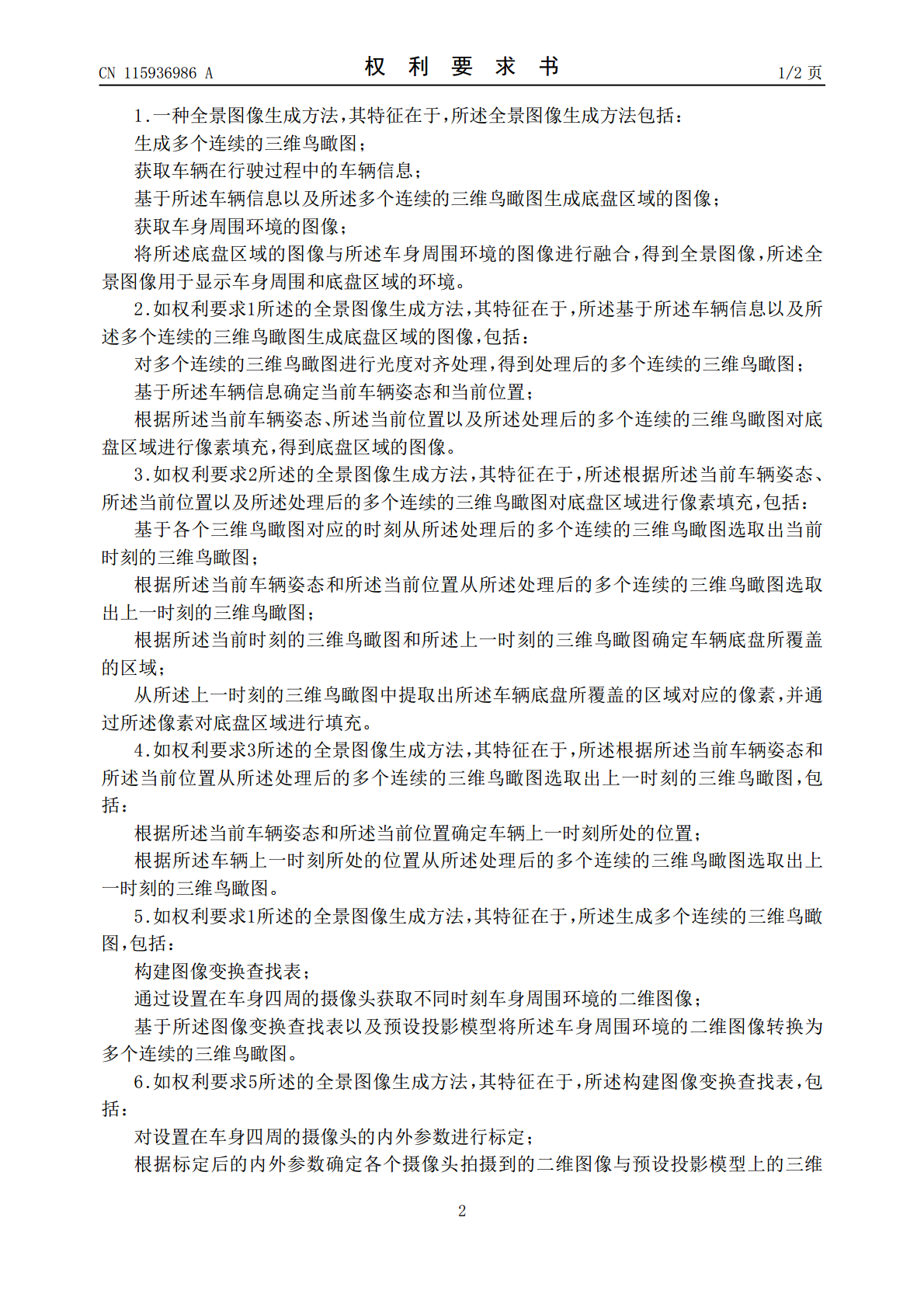
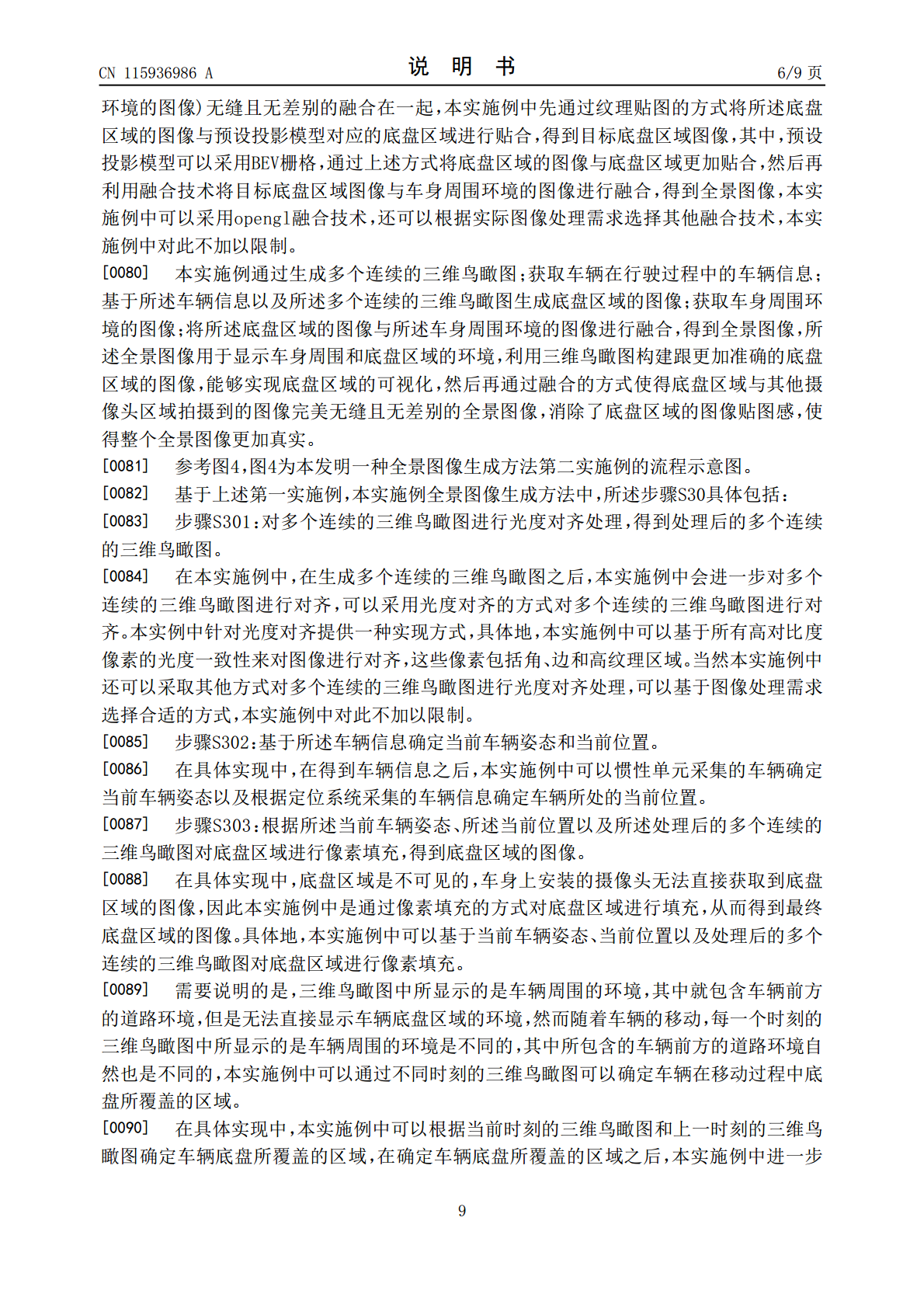
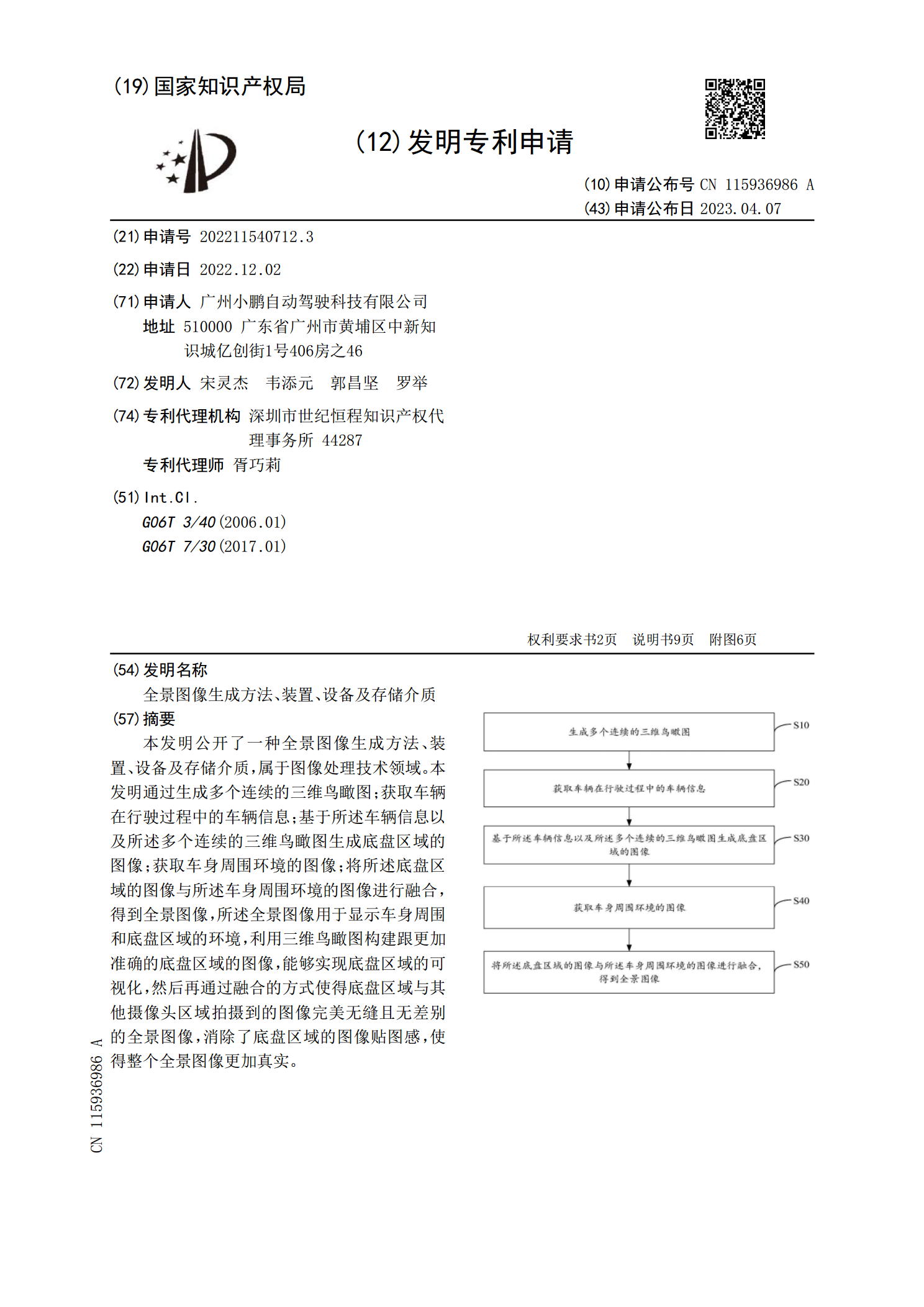
本发明公开了一种全景图像生成方法、装置、设备及存储介质,属于图像处理技术领域。本发明通过生成多个连续的三维鸟瞰图;获取车辆在行驶过程中的车辆信息;基于所述车辆信息以及所述多个连续的三维鸟瞰图生成底盘区域的图像;获取车身周围环境的图像;将所述底盘区域的图像与所述车身周围环境的图像进行融合,得到全景图像,所述全景图像用于显示车身周围和底盘区域的环境,利用三维鸟瞰图构建跟更加准确的底盘区域的图像,能够实现底盘区域的可视化,然后再通过融合的方式使得底盘区域与其他摄像头区域拍摄到的图像完美无缝且无差别的全景图像,消

全景图像的生成方法、装置、设备及存储介质.pdf
本申请实施例公开了全景图像的生成方法、装置、设备及存储介质,涉及直播技术领域,该方法通过接收直播服务器下发的由多张全景子图片按照预设的布局拼接于一背景图像中得到的合成图片,逐行逐列对合成图片进行扫描,获取全景子图片在背景图像上的边缘像素点数组,根据边缘像素点数组以及布局确定全景子图片的边缘线,沿着边缘线对合成图片进行裁剪并提取出各张全景子图片,将全景子图片渲染生成全景图像。本技术方案实现了对全景子图片的压缩处理,减少了图片传输的数据量,提高传输效率。

图像生成方法、装置、设备及存储介质.pdf
本申请实施例公开了一种图像生成方法、装置、设备及存储介质,属于计算机图形学领域。所述方法包括:确定三维虚拟场景的多个可视点的坐标。以目标投射图像中的每个像素点为起始点,向所述三维虚拟场景发射虚拟光子,所述目标投射图像为当前需要仿真的场景对应的投射图像。基于该多个可视点中每个可视点周围的虚拟光子的光能,确定所述多个可视点中每个可视点的亮度。基于所述多个可视点中每个可视点的亮度,生成所述三维虚拟场景对应的图像。本申请实施例通过图像生成方法自动生成三维虚拟场景对应的图像,不需要实体场景和实体设备,这降低了图像生

图像生成方法、装置、设备及存储介质.pdf
本公开实施例涉及一种图像生成方法、装置、设备及介质,获取第一图像,保持第一图像中的目标属性不变,对第一图像中的其他属性进行编辑,基于目标属性以及编辑后的其他属性,生成第二图像,以得到目标属性不变且其他属性发生变化的第二图像,因此,可以实现快速生成图像并提高图像多样化的效果,使得在进行模型训练时,提高训练样本的平衡性,以提高模型性能。
图像生成方法、装置、设备及存储介质.pdf
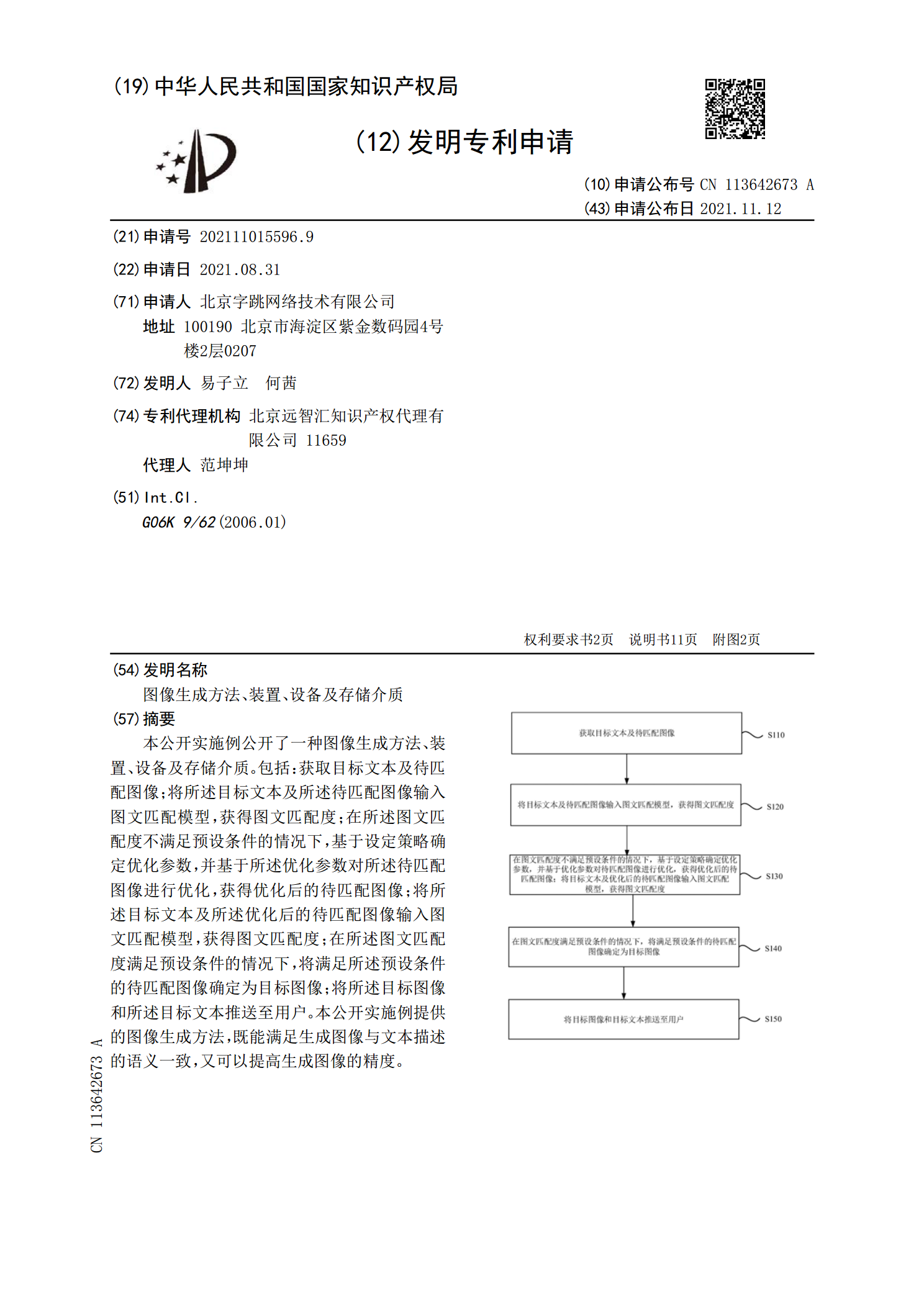
本公开实施例公开了一种图像生成方法、装置、设备及存储介质。包括:获取目标文本及待匹配图像;将所述目标文本及所述待匹配图像输入图文匹配模型,获得图文匹配度;在所述图文匹配度不满足预设条件的情况下,基于设定策略确定优化参数,并基于所述优化参数对所述待匹配图像进行优化,获得优化后的待匹配图像;将所述目标文本及所述优化后的待匹配图像输入图文匹配模型,获得图文匹配度;在所述图文匹配度满足预设条件的情况下,将满足所述预设条件的待匹配图像确定为目标图像;将所述目标图像和所述目标文本推送至用户。本公开实施例提供的图像生成